


Метрология
Метод приведения Он используется для определения результатов косвенного измерения и его погрешности при наличии корреляции между погрешностями измерений аргументов. Метод можно также применять при неизвестных распределениях погрешностей аргументов. Он предполагает наличие ряда согласованных результатов измерений аргументов Q11,Q,12,…,Q1m; Q21, Q22, …, Q2m; …, Qj1, QJ2, …, Qjm; …; QL1, QL2, …, QLm, полученных в процессе многократных измерений. Согласованность результатов измерений означает либо одновременное их осуществление, либо то, что они выполнены над одним и тем же объектом и в одних и тех же условиях.
Метод основан на приведении отдельных значений косвенно измеряемой величины к ряду простых измерений. Получаемые сочетания отдельных аргументов подставляют в формулу (8.6) и вычисляют отдельные значения измеряемой величины Q: Q1, Q2, ..., Qj, ,QL.
Результат косвенного измерения ![]() и СКО его случайной погрешности вычисляются по формулам
и СКО его случайной погрешности вычисляются по формулам
![]()
Доверительные границы случайной погрешности результата измерения рассчитываются по формуле ![]() где Т - коэффициент, зависящий от вида распределения отдельных значений определяемой величины и выбранной доверительной вероятности. При нормальном распределении отдельных значений измеряемой величины доверительные границы случайных погрешностей вычисляются по методике для прямых многократных измерений, изложенной в ГОСТ 8.207-76.
где Т - коэффициент, зависящий от вида распределения отдельных значений определяемой величины и выбранной доверительной вероятности. При нормальном распределении отдельных значений измеряемой величины доверительные границы случайных погрешностей вычисляются по методике для прямых многократных измерений, изложенной в ГОСТ 8.207-76.
Границы неисключенной систематической погрешности и доверительные границы погрешности результата косвенного измерения определяются так же, как и в рассмотренных выше случаях.
Глава 12. МЕТРОЛОГИЧЕСКИЕ
ХАРАКТЕРИСТИКИ СРЕДСТВ ИЗМЕРЕНИЙ И ИХ
НОРМИРОВАНИЕ
При использовании СИ принципиально важно знать степень соответствия информации о измеряемой величине, содержащейся в выходном сигнале, ее истинному значению. С этой целью для каждого СИ вводятся и нормируются определенные метрологические характеристики (MX). Метрологические характеристики — это характеристики свойств средства измерений, оказывающие влияние на результат измерения и его погрешности. Характеристики, устанавливаемые нормативно-техническими документами, называются нормируемыми, а определяемые экспериментально — действительными. Номенклатура MX, правила выбора комплексов нормируемых MX для средств измерений и способы их нормирования определяются стандартом ГОСТ 8.009-84 "ГСИ. Нормируемые метрологические характеристики средств измерений". Подробные комментарии к этому документу приведены в (58).
Метрологические характеристики СИ позволяют:
• определять результаты измерений и рассчитывать оценки характеристик инструментальной составляющей погрешности измерения в реальных условиях применения СИ;
• рассчитывать MX каналов измерительных систем, состоящих из ряда средств измерений с известными MX;
• производить оптимальный выбор СИ, обеспечивающих требуемое качество измерений при известных условиях их применения;
• сравнивать СИ различных типов с учетом условий применения.
При разработке принципов выбора и нормирования средств измерений необходимо придерживаться ряда положений, изложенных ниже.
1. Основным условием возможности решения всех перечисленных задач является наличие однозначной связи между нормированными MX и инструментальными погрешностями. Эта связь устанавливается посредством математической модели инструментальной составляющей погрешности, в которой нормируемые MX должны быть аргументами. При этом важно, чтобы номенклатура MX и способы их выражения были оптимальны. Опыт эксплуатации различных СИ показывает, что целесообразно нормировать комплекс MX, который, с одной стороны, не должен быть очень большим, а с другой — каждая нормируемая MX должна отражать конкретные свойства СИ и при необходимости может быть проконтролирована.
2. Нормирование MX средств измерений должно производиться исходя из единых теоретических предпосылок. Это связано с тем, что в измерительных процессах могут участвовать СИ, построенные на различных принципах.
3. Нормируемые MX должны быть выражены в такой форме, чтобы с их помощью можно было обоснованно решать практически любые измерительные задачи и одновременно достаточно просто проводить контроль СИ на соответствие этим характеристикам.
4. Нормируемые MX должны обеспечивать возможность статистического объединения, суммирования составляющих инструментальной погрешности измерений. В общем случае она может быть определена как сумма (объединение) следующих составляющих погрешности:
• ![]() (t), обусловленной отличием действительной функции преобразования в нормальных условиях от номинальной, приписанной соответствующими документами данному типу СИ. Эта погрешность называется основной;
(t), обусловленной отличием действительной функции преобразования в нормальных условиях от номинальной, приписанной соответствующими документами данному типу СИ. Эта погрешность называется основной;
• ![]() , обусловленной реакцией СИ на изменение внешних влияющих величин и неинформативных параметров входного сигнала относительно их номинальных значений. Эта погрешность называется дополнительной;
, обусловленной реакцией СИ на изменение внешних влияющих величин и неинформативных параметров входного сигнала относительно их номинальных значений. Эта погрешность называется дополнительной;
• ![]() обусловленной реакцией СИ на скорость (частоту) изменения входного сигнала. Эта составляющая, называемая динамической погрешностью, зависит и от динамических свойств средств измерений, и от частотного спектра входного сигнала;
обусловленной реакцией СИ на скорость (частоту) изменения входного сигнала. Эта составляющая, называемая динамической погрешностью, зависит и от динамических свойств средств измерений, и от частотного спектра входного сигнала;
•![]() , обусловленной взаимодействием СИ с объектом измерений или с другими СИ, включенным последовательно с ним в измерительную систему. Эта погрешность зависит от характеристик и параметров входной цепи СИ и выходной цепи объекта измерений.
, обусловленной взаимодействием СИ с объектом измерений или с другими СИ, включенным последовательно с ним в измерительную систему. Эта погрешность зависит от характеристик и параметров входной цепи СИ и выходной цепи объекта измерений.
Таким образом, инструментальную составляющую погрешности СИ можно представить в виде
![]()
где * — символ статистического объединения составляющих.
Первые две составляющие представляют собой статическую погрешность СИ, а третья — динамическую. Из них только основная погрешность определяется свойствами СИ. Дополнительная и динамическая погрешности зависят как от свойств самого СИ, так и от некоторых других причин (внешних условий, параметров измерительного сигнала и др.).
Требования к универсальности и простоте статистического объединения составляющих инструментальной погрешности обуславливают необходимость их статистической независимости — некоррелированности. Однако предположение о независимости этих составляющих не всегда верно.
Выделение динамической погрешности СИ как суммируемой составляющей допустимо только в частном, но весьма распространенном случае, когда СИ можно считать линейным динамическим звеном и когда погрешность является весьма малой величиной по сравнению с выходным сигналом. Динамическое звено считается линейным, если оно описывается линейными дифференциальными уравнениями с постоянными коэффициентами. Для СИ, являющихся существенно нелинейными звеньями, выделение в отдельно суммируемые составляющие статической и динамической погрешностей недопустимо.
5. Нормируемые MX должны быть инвариантны к условиям применения и режиму работы СИ и отражать только его свойства. Выбор MX необходимо осуществлять так, чтобы пользователь имел возможность рассчитывать по ним характеристики СИ в реальных условиях эксплуатации.
6. Нормируемые MX, приводимые в нормативно-технической документации, отражают свойства не отдельно взятого экземпляра СИ, а всей совокупности СИ данного типа, т.е. являются номинальными. Под типом понимается совокупность СИ, имеющих одинаковое назначение, схему и конструкцию и удовлетворяющих одним и тем же требованиям, регламентированным в технических условиях. Метрологические характеристики отдельного СИ данного типа могут быть любыми в пределах области значений номинальных MX. Отсюда следует, что MX средства измерений данного
типа должна описываться как нестационарный случайный процесс. Математически строгий учет данного обстоятельства требует нормирования не только пределов MX как случайных величин, но и их временной зависимости (т.е. автокорреляционных функций). Это приведет к чрезвычайно сложной системе нормирования и практической невозможности контроля MX, поскольку при этом он должен был бы осуществляться в строго определенные промежутки времени. Вследствие этого принята упрощенная система нормирования, предусматривающая разумный компромисс между математической строгостью и необходимой практической простотой. В принятой системе низкочастотные изменения случайных составляющих погрешности, период которых соизмерим с длительностью межповерочного интервала, при нормировании MX не учитываются. Они определяют показатели надежности СИ, обуславливают выбор рациональных межповерочных интервалов и других аналогичных характеристик. Высокочастотные изменения случайных составляющих погрешности, интервалы корреляции которых соизмеримы с длительностью процесса измерения, необходимо учитывать путем нормирования, например, их автокорреляционых функций.
Перечень нормируемых MX делится на шесть основных групп
(рис.12.1), которые и рассматриваются далее.
3.2. КЛАССЫ ТОЧНОСТИ СРЕДСТВ ИЗМЕРЕНИЯ
Для обеспечения единства измерений и взаимозаменяемости средств измерений характеристики их метрологических свойств (метрологические характеристики) нормируются и регламентируются стандартами. Номенклатура метрологических характеристик и полнота, с которой они должны описывать те или иные свойства средств измерений, зависят от назначения средств измерений, условий эксплуатации, режима работы и многих других факторов. В полном перечне метрологических характеристик можно выделить следующие их группы:
- градуировочные характеристики, определяющие соотношение между сигналами на входе и выходе средства измерений в статическом режиме. К ним относятся, например, номинальная статическая характеристика преобразования (градуировочная характеристика) прибора, номинальное значение меры, пределы измерения, цена деления шкалы, вид и параметры цифрового кода в цифровом приборе;
- показатели точности средства измерения, позволяющие оценить инструментальную составляющую погрешности результата измерения;
- динамические характеристики, отражающие инерционные свойства средств измерения и необходимые для оценивания динамических погрешностей измерений;
- функции влияния, отражающие зависимость метрологических характеристик средств измерения от воздействия влияющих величин или неинформативных параметров входного сигнала.
Неинформативным называется параметр входного сигнала, не связанный непосредственно с измеряемой величиной, но оказывающий влияние на результат измерения, например, частота переменного электрического тока при измерении его амплитуды.
Обычно метрологические характеристики нормируются раздельно для нормальных и рабочих условий применения средств измерений. Нормальными считаются такие условия, при которых изменением метрологических характеристик под воздействием влияющих величин можно пренебречь. Так, для многих типов средств измерений нормальными условиями применения являются: температура (20±5)°С, атмосферное давление 84... 106 кПа, относительная влажность 30... 80%. Рабочие условия отличаются от нормальных более широкими диапазонами влияющих величин.
Учет всех нормируемых метрологических характеристик средства измерений при оценивании погрешности результата измерений, как видно, сложная и трудоемкая процедура, оправданная при измерениях повышенной точности. При измерениях на производстве, в обиходе такая точность не всегда нужна. В то же время, определенная информация о возможной инструментальной составляющей погрешности измерения необходима. Такая информация дается указанием класса точности средства измерений.
Под классом точности понимают обобщенную характеристику точности средств измерений данного типа, определяемую пределами допускаемой основной погрешности. Классы точности присваивают средствам измерений при их разработке на основании исследований и испытаний представительной партии средств измерения данного типа. При этом пределы допускаемых погрешностей нормируют и выражают в форме абсолютных, приведенных или относительных погрешностей, в зависимости от характера изменения погрешностей в пределах диапазона измерений. Приведенной называется относительная погрешность, вычисленная в процентах от некоторого нормирующего значения. В качестве нормирующего обычно принимается конечное значение шкалы (верхний предел измерения для приборов с односторонней шкалой или сумма пределов — для приборов с нулем посредине).
Пределы допускаемой абсолютной погрешности устанавливают по формулам:
![]()
(3.4)
или
![]()
где х — значение измеряемой величины; а, b положительные числа, не зависящие от х.
положительные числа, не
Нормирование в соответствии с (3.5) означает, что в составе погрешности средства измерения присутствуют аддитивная и мультипликативная составляющие, например, для генератора низкой частоты ГЗ-36 ![]() = ±(0,03
= ±(0,03![]() +2) Гц.
+2) Гц.
Пределы допускаемой приведенной основной погрешности определяют по формуле
![]()
где Хн — нормирующее значение, выраженное в тех же единицах, что и х; р — отвлеченное положительное число, выбираемое из стандартизованного ряда значений (1*10n; 1,5*10n; ...,5*10n; ...,где n - 1,0,-1,-2 и т.д.).
Для измерительных приборов с существенно неравномерной шкалой нормирующее значение устанавливают равным длине шкалы.
Пределы допускаемой относительной основной погрешности:
если ![]() установлена по формуле (3.4)
установлена по формуле (3.4)
![]()
(3.7)
если А установлена по (3.5)
(3.8)
где q — отвлеченное положительное число, выбираемое из стандартизованного ряда значений; Хк — больший по модулю из пределов измерений (верхний предел измерения, или сумма пределов измерения для приборов с нулем посредине); с, d — положительные числа, выбираемые из стандартизованного ряда; х — показание прибора.
Пределы допускаемых дополнительных погрешностей, как правило, устанавливают в виде дольного значения предела допускаемой основной погрешности. Обозначение классов точности наносится на шкалы, щитки или корпуса приборов.
К![]() лассы точности средств измерений обозначаются условными знаками (буквами, цифрами). Для средств измерений, пределы допускаемой основной погрешности которых выражают в форме приведенной погрешности или относительной погрешности в соответствии с (3.6) и (3.7), классы точности обозначаются числами, равными этим пределам в процентах. Чтобы отличить относительную погрешность от приведенной, обозначение класса
лассы точности средств измерений обозначаются условными знаками (буквами, цифрами). Для средств измерений, пределы допускаемой основной погрешности которых выражают в форме приведенной погрешности или относительной погрешности в соответствии с (3.6) и (3.7), классы точности обозначаются числами, равными этим пределам в процентах. Чтобы отличить относительную погрешность от приведенной, обозначение класса
точности в виде относительной погрешности обводят кружком . Если
п![]() огрешность нормирована в процентах от длины шкалы, то под обозначением класса ставится знак . Если погрешность нормирована формулой (3.8), то класс точности обозначается как с/d (например, 0,02 / 0,01).
огрешность нормирована в процентах от длины шкалы, то под обозначением класса ставится знак . Если погрешность нормирована формулой (3.8), то класс точности обозначается как с/d (например, 0,02 / 0,01).
Пример. На шкале амперметра с пределами измерения 0... 10 А нанесено обозначение класса точности 2,5. Это означает, что для данного прибора нормирована приведенная
п![]() огрешность. Подставляя в (3.6) Хn = 10А и р = 2,5 получим
огрешность. Подставляя в (3.6) Хn = 10А и р = 2,5 получим ![]()
Если бы обозначение класса точности было , то погрешность следовало бы
вычислить в процентах от измеренного значения. Так, при Iизм = 2А, погрешность прибо
ра не должна превышать ![]() .
.
2.7. КОСВЕННЫЕ ИЗМЕРЕНИЯ
При косвенных измерениях искомое значение величины находят расчетом на основе измерения других величин, связанных с измеряемой величиной известной зависимостью
![]()
![]()
Результатом косвенного измерения является оценка величины А, которую находят подстановкой в формулу (2.18) оценок аргументов аi.
Поскольку каждый из аргументов а, измеряется с некоторой погрешностью, то задача оценивания погрешности результата сводится к суммированию погрешностей измерения аргументов. Однако особенность косвенных измерений состоит в том, что вклад отдельных погрешностей измерения аргументов в погрешность результата зависит от вида функции (2. 18).
Для оценки погрешностей существенно разделение косвенных измерений на линейные и нелинейные косвенные измерения. При линейных косвенныхизмерениях уравнение измерений имеет вид
![]()
![]()
где bj— постоянные коэффициенты при аргументах аi.
Любые другие функциональные зависимости (2.18) относятся к нелинейным косвенным измерениям.
Результат линейного косвенного измерения вычисляют по формуле (2.19), подставляя в нее измеренные значения аргументов.
Погрешности измерения аргументов могут быть заданы своими границами ![]() , либо доверительными границами
, либо доверительными границами ![]() , с доверительными вероятностями Рi .
, с доверительными вероятностями Рi .
При малом числе аргументов (меньше пяти) простая оценка погрешности результата ![]() получается суммированием предельных погрешностей (без учета знака), т.е. подстановкой границ
получается суммированием предельных погрешностей (без учета знака), т.е. подстановкой границ ![]() ... ,
... , ![]() в выражение
в выражение
(2.20)
![]()
Однако эта оценка является излишне завышенной, поскольку такое суммирование фактически означает, что погрешности измерения всех аргументов одновременно имеют максимальное значение и совпадают по знаку. Вероятность такого совпадения практически равна нулю. Для нахождения более реалистичной оценки переходят к статистическому суммированию погрешностей аргументов. Полагая, что в заданных границах погрешности аргументов распределены равномерно, доверительные границы ![]() (Р) погрешности результата измерения рассчитывают по формуле
(Р) погрешности результата измерения рассчитывают по формуле
(2.21)
где коэффициент k определен в (2.15).
Если погрешности измерения аргументов заданы доверительными границами с одинаковыми доверительными вероятностями, то полагая распределение этих погрешностей нормальным, доверительные границы результата находят по формуле
(2.22)
При различных доверительных вероятностях погрешностей аргументов их необходимо привести к одному и тому же значению Р.
Нелинейные косвенные измерения характеризуются тем, что результаты измерений аргументов подвергаются функциональным преобразованиям. Но, как показано в теории вероятностей, любые, даже простейшие функциональные преобразования случайных величин, приводят к изменению законов их распределения.
Пример. Результат измерения аргумента ![]() подчиняется нормальному распределению плотности вероятностей, кривая которого
подчиняется нормальному распределению плотности вероятностей, кривая которого  показана на рис. 2.13, а.
показана на рис. 2.13, а.
При возведении измеренного значения величины в квадрат q = а2 график плотности распределения претерпевает изменения и принимает вид, показанный на рис. 2.13, б (вывод формулы опускаем). Уравнение кривой в этом случае имеет следующий вид:
![]()
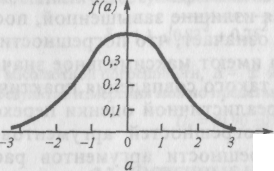
Рис. 2.13. Графики плотности распределения вероятности результата измерения, подчиняющегося нормальному закону, и квадрата этого результата измерения
При сложной функции (2.18) и в особенности если это функция нескольких аргументов, отыскание закона распределения погрешности результата связано со значительными математическими трудностями. Поэтому при нелинейных косвенных измерениях приходится отказываться от использования интервальных оценок погрешности результата, ограничиваясь приближенной верхней оценкой ее границ. В основе приближенного оценивания погрешности нелинейных косвенных измерений лежит линеаризация функции (2.18) и дальнейшая обработка результатов, как при линейных измерениях.
Запишем выражение для полного дифференциала функции А:
![]()
(2.23)
По определению полный дифференциал функции — это приращение функции, вызванное малыми приращениями ее аргументов.
Учитывая, что погрешности измерения аргументов всегда являются малыми величинами по сравнению с номинальными значениями аргументов, можно заменить в (2.23) дифференциалы аргументов dаi, на погрешности измерений ![]() аi, а дифференциал функции dA на погрешность результата измерения
аi, а дифференциал функции dA на погрешность результата измерения ![]() :
:
![]()
(2.24)
Полагая, как и прежде, что распределения погрешностей аргументов подчиняются равномерному закону, при числе слагаемых m < 5 границы погрешности результата можно определить по формуле (2.20). В том случае, когда погрешности аргументов заданы их доверительными границами, оценку погрешности результата измерения вычисляют по (2.22). В обеих случаях роль коэффициентов b1,b2,…,bm выполняют частные
производные ![]()
Применив формулу (2.24), получим несколько простых правил оценивания погрешности результата косвенного измерения.
Правило 1. Погрешности в суммах и разностях. Если a1 и а2 измерены с погрешностями ![]() и
и ![]() и измеренные значения используются для вычисления суммы или разности А = а1*а2, то суммируются абсолютные погрешности (без учета знака):
и измеренные значения используются для вычисления суммы или разности А = а1*а2, то суммируются абсолютные погрешности (без учета знака):
![]()
![]()
Правило 2. Погрешности в произведениях и частных. Если измеренные значения а1, и а2 используются для вычисления А = а1* а2 или А = а1/а2, то суммируются относительные погрешности ![]() , где
, где ![]() .
.
Правило 3. Измеренная величина умножается на точное число.
Если а используется для вычисления произведения А = В * а, в котором В не имеет погрешности, то ![]() А = |В|
А = |В|![]() а .
а .
Правило 4. Возведение в степень. Если а используется для вычисления степени А = аn, то ![]() А =
А = ![]() .
.
Правило 5. Погрешность в произвольной функции одной переменной. Если а используется для вычисления функции А(а), то
![]()
Вывод этих правил не приводится и может быть легко сделан самостоятельно. Использование правил позволяет получить не слишком завышенную оценку предельной погрешности результата нелинейного косвенного измерения при не слишком большом числе аргументов (m < 5).
Пример. Производится косвенное измерение электрической мощности, рассеиваемой на резисторе сопротивлением R при протекании по нему тока I. Так как Р =I2R, то, применяя правила 2 и 4, получим ![]()
Пример. Измерением найдено значение утла ![]() Необходимо найти cos
Необходимо найти cos![]() . Наилучшая оценка для cos20° = 0,94. Погрешность
. Наилучшая оценка для cos20° = 0,94. Погрешность ![]() должна быть выражена в радианах, т.е.
должна быть выражена в радианах, т.е. ![]() = 3° = 0,05 рад. Тогда по правилу 5
= 3° = 0,05 рад. Тогда по правилу 5 ![]() (cos
(cos![]() ) = (sin20°)*0,05 = 0,34-0,05 = 0,02. Окончательно cos
) = (sin20°)*0,05 = 0,34-0,05 = 0,02. Окончательно cos![]() = 0,94±0,02 .
= 0,94±0,02 .
7.Преобразование измеряемой величины как косвенные измерения
При косвенных измерениях результат определяется на основании измерений величин, связанных с измеряемой величиной известной зависимостью. При этом в качестве примеров рассматривались случаи, когда закономерная зависимость выражалась строго математически. Однако строгая закономерность зависимости между величинами может быть неизвестна, хотя и известно, что такая зависимость существует. Например, известно, что электродвижущая сила термопары зависит от температуры. Определить эту зависимость на основании известных нам законов физики мы не можем даже для одной и той же пары металлов. На эту зависимостиь влияют малейшие отклонения в составах сплавов и технология их обработки. В этих случаях нужную нам зависимость мы можем определить методом совместных измерений. И не только определить, но и исследовать, и изучить постоянство и воспроизводимость этой зависимости влияния на нее внешних воздействий. Когда зависимость одной величины от другой будет нам хорошо известна, мы имеем возможность измерять нужную нам величину на основании измерений других величин, связанных с измеряемой известной зависимостью.
Описанные измерения следует также отнести к косвенным измерениям как одну из его разновидностей. Разновидностью косвенных измерений является также случай нахождения значения измеряемой величины путем прямых измерений компонентов известной формулы, определяющей ее зависимости от этих компонентов. Эта разновидность косвенных измерений относится к случаю нахождения значения измеряемой величины по ее зависимости от других величин, определяемой путем совместных измерений. Вторая разновидность косвенных измерений может рассматриваться так же, как измерение путем преобразования измеряемой величины в другую, по природе своей существенно отличающуюся от измеряемой, но связанную с ней устойчивой зависимостью.