


Элементы тензороного исчисления
Возникновение тензорного исчисления было подготовлено в 19 веке развитием теории алгебраических форм, с одной стороны, и теории квадратичных дифференциальных форм - с другой. Исследования в области теории дифференциальных квадратичных форм были непосредственно связаны с дифференциальной геометрией: с геометрией поверхностей (К. Гаусс) и с геометрией многомерного метрического пространства (Б. Риман). Современную форму тензорному исчислению придал итальянский математик Г. Риччи-Курбастро, поэтому тензорное исчисление иногда называется исчислением Риччи. Идеи Риччи-Курбастро первоначально не получили широкого распространения. Внимание к ним возросло после появления (1915-16) общей теории относительности А. Эйнштейна, математическая часть которой целиком основана на тензорном исчислении.
Тензор (от лат. tensus - напряжённый, натянутый), математический термин, появившийся в середине 19 века и с тех пор применяющийся в двух различных смыслах. Наибольшее распространение термин «тензор» получил в современном тензорном исчислении, где это название присваивается особого рода величинам, преобразующимся по особому закону. В механике, особенно в теории упругости, термин «тензор» широко применяется как синоним симметрического аффинора, то есть линейного оператора F, преобразующего вектор х в вектор Fх, и симметрического в том смысле, что скалярное произведение уFх не меняется при перестановке векторов х и у. Здесь термин был первоначально связан с малыми растяжениями (и сжатиями), возникающими при упругой деформации (откуда и название «тензор»), а затем перенесён в другие области механики. Так появились тензор деформации, тензор напряжения, тензор инерции и др.
§1. Линейные преобразования
Пусть переменные ![]() преобразуются в новые
преобразуются в новые ![]() с помощью линейного преобразования
с помощью линейного преобразования
где ![]() - константы (все индексы пробегают значения 1, 2, 3..., n независимо друг от друга.). Применяя условие о суммировании, можем записать эту систему уравнений в виде
- константы (все индексы пробегают значения 1, 2, 3..., n независимо друг от друга.). Применяя условие о суммировании, можем записать эту систему уравнений в виде
![]() (1.1)
(1.1)
Мы предполагаем, что определитель преобразования ![]() не равен нулю. Пусть
не равен нулю. Пусть ![]() является алгебраическим дополнением элемента
является алгебраическим дополнением элемента ![]() в определителе c деленным на величину
в определителе c деленным на величину ![]() (
(![]() - обратная матрица). Тогда
- обратная матрица). Тогда
![]() (1.2)
(1.2)
и мы можем разрешить систему уравнений (1.1) относительно x
![]() (1.3)
(1.3)
Это показывает, что данное преобразование обратимо.
Кроме того, если ![]() мы имеем
мы имеем
![]()
т. е. тождественное преобразование.
Если перейти сначала от переменных ![]() к
к ![]() по (1.1), а затем от переменных
по (1.1), а затем от переменных ![]() к
к ![]() при помощи преобразования
при помощи преобразования
![]()
то мы видим, что переход от первоначальных переменных ![]() к
к ![]() определяется формулой
определяется формулой
![]()
где
![]()
Это преобразование, следовательно, также линейное.
Говорят, что совокупность преобразований образует группу, когда она удовлетворяет следующим условиям: 1) если преобразования от ![]() к
к![]() и от
и от ![]() к
к![]() принадлежат данной совокупности, то преобразование от
принадлежат данной совокупности, то преобразование от ![]() к
к ![]() также принадлежат к ней; 2) совокупность преобразования содержит тождественное и обратное преобразования.
также принадлежат к ней; 2) совокупность преобразования содержит тождественное и обратное преобразования.
Таким образом, совокупность линейных преобразований образует группу.
§ 2. Индексные обозначения
Если нам дана совокупность трех независимых переменных, то они могут быть обозначены тремя различными буквами, например x,y,z, но мы считаем более удобным обозначать переменные данной совокупности одной и той же буквой, различая их посредством индексов. Таким образом, мы можем записать три переменные в виде![]() , или в более компактной форме:
, или в более компактной форме:
![]() (2.1)
(2.1)
Здесь мы написали индекс внизу, но в равной мере мы могли бы использовать вместо этого верхний значок, так что переменные были бы записаны в виде ![]() или
или
![]() (2.2)
(2.2)
Однородная линейная функция переменных обычно записывается в виде
![]() (2.3)
(2.3)
где ![]() - константы. Таким образом, коэффициенты линейной формы могут быть записаны в виде
- константы. Таким образом, коэффициенты линейной формы могут быть записаны в виде
![]()
Объекты, которые, подобно ![]() и
и ![]() , зависят только от одного индекса, называются объектами первого порядка, а отдельные буквы с индексами
, зависят только от одного индекса, называются объектами первого порядка, а отдельные буквы с индексами![]() и
и ![]() называются элементами или составляющими объекта. Объекты первого порядка, имеющие три составляющие, назовем трехмерными. Имеются два типа объектов первого порядка, а именно те, у которых индекс вверху, и те, у которых индекс внизу; следовательно, все объекты первого порядка принадлежат к одному из двух типов
называются элементами или составляющими объекта. Объекты первого порядка, имеющие три составляющие, назовем трехмерными. Имеются два типа объектов первого порядка, а именно те, у которых индекс вверху, и те, у которых индекс внизу; следовательно, все объекты первого порядка принадлежат к одному из двух типов
![]() (2.4)
(2.4)
С другой стороны, однородная квадратичная функция трех переменных имеет вид
 (2.5)
(2.5)
где атп - константы. Мы видим, что коэффициенты квадратичной формы зависят от двух индексов и записываются так:
![]()
Составляющие этого объекта преобразуются следующим образом:
![]()
Следовательно, эта формула дает один из способов, с помощью которого может быть преобразован объект первого порядка. Любой объект, составляющие которого преобразуются по этому закону, называется контравариантным вектором. Таким образом, есть контравариантный вектор, если при линейном преобразовании переменных (1.1) его преобразованные составляющие определяются формулами
![]() (2.6)
(2.6)
Имеется и другой способ преобразования элементов объекта первого порядка. Мы уже видели, что коэффициенты линейной формы переменных x также образуют объект первого порядка. Таким образом, коэффициенты линейной формы ![]() являются составляющими объекта
являются составляющими объекта![]() . Предположим, что составляющие
. Предположим, что составляющие ![]() преобразуются таким образом, что линейная форма
преобразуются таким образом, что линейная форма ![]() остается инвариантной относительно преобразования переменных (1.1). Если мы обозначим через
остается инвариантной относительно преобразования переменных (1.1). Если мы обозначим через ![]() новые составляющие объекта
новые составляющие объекта ![]() (после преобразования), то получим
(после преобразования), то получим
![]() ,
,
так как эта линейная форма есть инвариант. Тогда из (1.3) следует
![]()
Поскольку немой индекс может быть обозначен любой буквой, то эту систему уравнений можно записать в виде
![]()
Если это соотношение справедливо для всех значений переменных ![]() , то должно выполняться равенство
, то должно выполняться равенство
![]() (2.7)
(2.7)
Это преобразование, очевидно, отлично от преобразования, задаваемого формулой (2.6). Объект первого порядка, составляющие которого преобразуются по этому закону, называется ковариантным вектором.
Таким образом, у нас есть два типа тензоров первого порядка, и мы условимся различать их с помощью положения индекса. Если - тензор контравариантен, мы используем верхний индекс, если же он ковариантен, то нижний. Другими словами, верхний индекс обозначает контравариантностъ, а нижний индекс — ковариантность.
Объекты, которые зависят от двух индексов, называются объектами второго порядка. Из того, что индексы бывают верхние и нижние, следует, что объекты второго порядка могут быть трех типов:
![]() (2.8)
(2.8)
Легко видеть, что в этом случае каждый объект имеет 9 составляющих.
Аналогично можно получить объекты третьего порядка, которые будут зависеть от трех индексов и могут принадлежать к любому из четырех типов:
![]() (2.9)
(2.9)
Здесь каждый объект содержит ![]() или 27 составляющих. Мы можем продолжать это построение и получить объекты любого порядка.
или 27 составляющих. Мы можем продолжать это построение и получить объекты любого порядка.
Для законченности этой последовательности мы назовем объект а, не имеющий индексов, объектом нулевого порядка. Если этот объект имеет одно и то же значение и в новых переменных ![]() и в старых переменных
и в старых переменных ![]() , то он называется скаляром, или инвариантом. Следовательно, если а есть инвариант, то
, то он называется скаляром, или инвариантом. Следовательно, если а есть инвариант, то
![]() , (2.10)
, (2.10)
где ![]() есть значение данного объекта в новых переменных.
есть значение данного объекта в новых переменных.
Мы взяли число измерений равным трем лишь для определенности. Все, что было сказано выше, применимо также к любому числу измерений, если условиться, что число значений, пробегаемых индексом, равно числу измерений. Например, если число измерений равно четырем, следует считать, что индексы могут пробегать значения от 1 до 4, а не от 1 до 3, как предполагалось выше.
§ 3. Общее определение тензоров
Векторы, ковекторы, линейные операторы, и билинейные формы - примеры тензоров. Они являются геометрическими объектами, которые представляются в числовой форме, после того, как выбран базис в пространстве. Это числовое представление является своим для каждого из них: векторы и ковекторы представляются одномерными массивами, линейные операторы и квадратичные формы - двумерными массивами. Кроме количества индексов, имеет значение также и их расположение. Координаты вектора нумеруются одним верхним индексом, который называется контравариантным индексом. Координаты ковектора нумеруются одним нижним индексом, который называется ковариантным индексом. В матрице билинейной формы мы используем два нижних индекса; поэтому билинейные формы называют дважды-ковариантными тензорами. Линейные операторы - тензоры смешанного типа; их элементы нумеруются одним нижним и одним верхним индексами. Число индексов и их положения определяют правила преобразования, т.е. то как компоненты каждого конкретного тензора ведут себя при смене базиса. В общем случае, любой тензор представляет собой многомерный массив с определенным числом верхних и нижних индексов. Давайте обозначать число этих индексов через r и . Тогда получится тензор типа (r,); или иногда используется термин валентность. Тензор типа (r,), или тензор валентности (r,) - это r-раз контравариантный и s-раз ковариантный тензор.
Все это была терминология; теперь давайте перейдем к точному определению.
Оно базируется на следующих общих формулах преобразования:
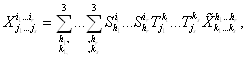 (3.1)
(3.1)
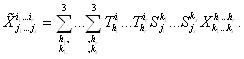 (3.2)
(3.2)
Определение 1. Геометрический объект X, который в каждом базисе представляется (r + )-мерным массивом ![]() вещественных чисел, удовлетворяющих правилам преобразования (3.1) и (3.2) при смене базиса, называется тензором типа (r,), или валентности (r,).
вещественных чисел, удовлетворяющих правилам преобразования (3.1) и (3.2) при смене базиса, называется тензором типа (r,), или валентности (r,).
Индексы ![]() и
и ![]() - свободные индексы. В правой стороне равенства (3.1) они распределены в S-ках и T-шках, каждый имеет только одно вхождение и сохраняет свою позицию при переходе из левой в правую часть равенства, т.е. верхние индексы
- свободные индексы. В правой стороне равенства (3.1) они распределены в S-ках и T-шках, каждый имеет только одно вхождение и сохраняет свою позицию при переходе из левой в правую часть равенства, т.е. верхние индексы ![]() остаются верхними, а нижние индексы
остаются верхними, а нижние индексы ![]() остаются нижними в правой части равенства (3.1).
остаются нижними в правой части равенства (3.1).
Остальные индексы ![]() и
и ![]() - это индексы суммирования, они входят в правую часть (3.1) парами: один раз в качестве верхнего индекса и один раз в качестве нижнего индекса, один раз в S-матрице либо в T-матрице и второй раз среди индексов в компонентах массива
- это индексы суммирования, они входят в правую часть (3.1) парами: один раз в качестве верхнего индекса и один раз в качестве нижнего индекса, один раз в S-матрице либо в T-матрице и второй раз среди индексов в компонентах массива ![]() .
.
При выражении ![]() через
через ![]() каждый верхний индекс обслуживается ровно один раз матрицей прямого перехода S, порождая при этом ровно одно суммирование в формуле (3.1):
каждый верхний индекс обслуживается ровно один раз матрицей прямого перехода S, порождая при этом ровно одно суммирование в формуле (3.1):
![]() (3.3)
(3.3)
Подобным же образом, каждый нижний индекс обслуживается матрицей обратного перехода T и тоже порождает одно суммирование в формуле (1):
![]() (3.4)
(3.4)
Формулы (3.3) и (3.4) совпадают с (3.1), они записаны для того, чтобы сделать более понятным то, как записывается формула (3.1). Итак, определение тензоров дано.
§ 4. Скалярное произведение и метрический тензор
Ковекторы, линейные операторы и билинейные формы, те, что мы рассматривали выше, все это были искусственно построенные тензоры. Однако, есть некоторое количество тензоров естественного происхождения. Давайте вспомним, что мы живем в метрическом мире. Мы можем измерять расстояния между точками (следовательно, мы можем измерять длины векторов) и измерять углы между двумя направлениями в пространстве. Поэтому для любых двух векторов x и y мы можем определить их скалярное произведение:
(x,y) = |xycos(φ), (4.1)
где φ - угол между векторами x и y. Это естественное скалярное произведение, порожденное нашей способностью измерять длины или, вернее сказать, тем, что понятие длины дано нам в ощущениях в том мире, где мы живем.
Вспомним следующие свойства естественного скалярного произведения (4.1):
(1) (x+y, z) = (x, z)+(y, z);
(2) (αx, y) = α(x, y);
(3) (x, y+z) = (x, y)+(x, z);
(4) (x, αy) = α(x, y);
(5) (x, y) = (y, x);
(6) (x, x)≥0 и (x, x) = 0 влечетx = 0.
Обратите внимание, что первые четыре свойства скалярного произведения
(4.1) очень похожи на свойства квадратичной формы. Это не случайное совпадение.
Давайте рассмотрим два произвольных вектора x и y вместе с их разложениями в некотором базисе ![]() . Это означает, что мы имеем следующие выражения для них:
. Это означает, что мы имеем следующие выражения для них:
![]() (4.2)
(4.2)
Подставим (4.2) в формулу (4.1) и, используя четыре свойства(1)–(4) из шести упомянутых в упражнении, выведем следующую формулу для скалярного произведения векторов x и y:
![]() (4.3)
(4.3)
Обозначим ![]() и запишите (4.3) в виде
и запишите (4.3) в виде
![]() (4.4)
(4.4)
Рассмотрим другой базис ![]() , обозначим
, обозначим ![]() и посредством формул преобразования
и посредством формул преобразования
![]() и
и ![]()
докажем, что матрицы ![]() и
и ![]() являются компонентами геометрического объекта, подчиняющимися преобразованиям
являются компонентами геометрического объекта, подчиняющимися преобразованиям
![]() и
и ![]()
при замене базиса. Таким образом мы докажем, что эта матрица Грама
![]() (4.5)
(4.5)
задает тензор типа (0,2). Это очень важный тензор; его называют метрическим тензором. Оно описывает не только скалярное произведения в форме (4.4), но и всю геометрию нашего пространства. Свидетельства этого факта приводятся ниже.
Матрица (4.5) симметрична из-за свойства (5). Теперь, сравнивая формулу (4.4) с формулой
![]()
и помня о тензорной природе матрицы (4.5), мы приходим к выводу, что скалярное произведение – это симметричная билинейная форма:
(x, y) = g(x,y). (4.6)
Квадратичная форма, соответствующая (4.6), очень проста: f(x) = g(x,x) =![]() . Обратная матрица для (4.5) обозначается тем же самым символом g, но она имеет два верхних индекса:
. Обратная матрица для (4.5) обозначается тем же самым символом g, но она имеет два верхних индекса: ![]() . Это определяет тензор типа (2,0). Такой тензор называется дуальным метрическим тензором.
. Это определяет тензор типа (2,0). Такой тензор называется дуальным метрическим тензором.
§5. Действия с тензорами
1) Линейные операции.
Так как ![]() - пространство тензоров ранга р - является линейным пространством, то в нем определены действия сложения и умножения на число:
- пространство тензоров ранга р - является линейным пространством, то в нем определены действия сложения и умножения на число:
![]() (5.1)
(5.1)
Если тензоры представлены своими компонентами в одном и том же базисе, то линейной комбинации тензоров соответствует та же линейная комбинация их компонент.
2) Тензорное умножение.
В отличие от линейных операций, это действие совершается с произвольными тензорами, не обязательно имеющими одинаковый ранг.
Если X - тензор ранга р, а Y - тензор ранга q, то результатом будет тензор ранга +q, обозначаемый XY:
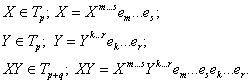 (5.2)
(5.2)
Тензорное произведение произвольного числа тензоров обладает свойством ассоциативности.
Для того чтобы перейти к другим действиям с тензорами, нам понадобится следующее определение.
Определение. Тензоры, представимые в виде abc…h, называются разложимыми.
Не каждый тензор является разложимым, но любой тензор может быть представлен в виде линейной комбинации разложимых.
3) Перестановка (i,j).
Перестановкой T(i,j) называется линейная функция, действующая из ![]() в
в ![]() (т.е. не меняющая ранг тензора) и состоящая для разложимых тензоров во взаимной перестановке векторов, стоящих на i-м и j-м местах:
(т.е. не меняющая ранг тензора) и состоящая для разложимых тензоров во взаимной перестановке векторов, стоящих на i-м и j-м местах:
![]() (5.3)
(5.3)
Например,![]()
На произвольные тензоры операция перестановки распространяется по линейности, например:

Для тензоров второго ранга возможна только одна перестановка - Т(1,2), обозначаемая просто буквой Т:
![]()
Для произвольного тензора второго ранга X имеем:
Из полученного соотношения для ![]() видно, что матрица компонент тензора
видно, что матрица компонент тензора ![]() в простом базисе является транспонированной матрицей компонент тензора X в том же базисе. Именно поэтому операция перестановки тензоров второго ранга называется еще транспонированием.
в простом базисе является транспонированной матрицей компонент тензора X в том же базисе. Именно поэтому операция перестановки тензоров второго ранга называется еще транспонированием.
4) Свертывание (i,j).
Свертыванием ![]() называется линейная функция, действующая из
называется линейная функция, действующая из ![]() в
в ![]() (понижающая ранг тензора на 2) и состоящая для разложимых тензоров в скалярном перемножении вектора, занимающего i-е место, на вектор, занимающий j-е место:
(понижающая ранг тензора на 2) и состоящая для разложимых тензоров в скалярном перемножении вектора, занимающего i-е место, на вектор, занимающий j-е место:
 (5.4)
(5.4)
Например, ![]() .
.
На произвольные тензоры операция свертывания переносится по линейности, например:
Для тензоров второго ранга возможно только одно свертывание - ![]() , обозначаемое просто
, обозначаемое просто![]() :
:
![]()
Скаляр ![]() называется следом тензора второго ранга X.
называется следом тензора второго ранга X.
Если тензор записан в смешанных компонентах, то
![]()
(п - размерность пространства Эп). Таким образом, след тензора второго ранга совпадает со следом матрицы его смешанных компонент.
Для матриц ко- или контравариантных компонент предыдущее утверждение, вообще говоря, не верно:
![]()
5) Простое умножение.
Простым умножением тензора X ранга р на тензор Y ранга q называется операция, состоящая в свертывании (р,р + 1) тензорного произведения XY и обозначаемая ![]() :
:
![]() (5.5)
(5.5)
Другими словами, простое умножение сводится к скалярному перемножению последних векторов в разложении тензора X на первые векторы в разложении тензора Y. Для разложимых тензоров:
![]()
Для произвольных тензоров:

В результате простого умножения тензора ранга р на тензор ранга q получается тензор ранга р+q-2. В частности, результатом простого умножения двух тензоров второго ранга будет тензор второго ранга.
6) Косое умножение.
Это действие имеет смысл только для тензоров, построенных на основе трехмерного векторного пространства ![]() . Как уже упоминалось, в
. Как уже упоминалось, в ![]() определено векторное произведение векторов
определено векторное произведение векторов ![]()
Пусть ![]() Операция косого умножения, обозначаемая
Операция косого умножения, обозначаемая ![]() , приводит к тензору ранга р+q-1 и состоит в векторном перемножении последних векторов в разложении тензора X на первые векторы в разложении тензора Y:
, приводит к тензору ранга р+q-1 и состоит в векторном перемножении последних векторов в разложении тензора X на первые векторы в разложении тензора Y:
 (5.6)
(5.6)
Очевидно, что в случае двух векторов операция косого умножения совпадает с векторным умножением.
Для тензоров второго ранга с использованием векторного умножения строится еще одна операция - векторный инвариант. Это унарная (т.е. имеющая один аргумент) операция, применительно к тензору T обозначаемая как Тх, определяется для разложимых тензоров следующим образом
![]() ,
,
и распространяется на произвольные тензоры по линейности:
![]()
7) Полное умножение.
Пусть ![]() , причем р>q.
, причем р>q.
Операцию полного умножения, обозначаемую ![]() , определим сначала для разложимых тензоров следующим образом: при полном умножении (разложимого) тензора X на тензор Y производится скалярное умножение последнего вектора в разложении тензора X на последний вектор в разложении тензора Y, затем скалярное умножение предпоследних векторов в разложениях этих тензоров и т.д., пока не будут исчерпаны все векторы в разложении тензора Y:
, определим сначала для разложимых тензоров следующим образом: при полном умножении (разложимого) тензора X на тензор Y производится скалярное умножение последнего вектора в разложении тензора X на последний вектор в разложении тензора Y, затем скалярное умножение предпоследних векторов в разложениях этих тензоров и т.д., пока не будут исчерпаны все векторы в разложении тензора Y:
![]() (5.7)
(5.7)
Для произвольных тензоров полное умножение производится по правилу "многочлен на многочлен". Результатом полного умножения тензора ранга р на тензор ранга q является тензор ранга р -q.
Если X и Y - тензоры одинакового ранга, то полное умножение ![]() совпадает с введенным ранее скалярным произведением в пространстве
совпадает с введенным ранее скалярным произведением в пространстве ![]() .
.
§6. Поднятие и опускание индексов
Предположим, что X - это тензор типа (r,s). Давайте выберем его α-тый нижний индекс: ![]() Символы, используемые для других индексов, несущественны. Поэтому, мы обозначили их точками. Затем рассмотрим тензорное произведение
Символы, используемые для других индексов, несущественны. Поэтому, мы обозначили их точками. Затем рассмотрим тензорное произведение ![]()
![]() (6.1)
(6.1)
Здесь g - дуальный метрический тензор с элементами![]() . На следующем шаге свернем (6.1) по паре индексов k и q. Для этой цели мы заменяем их на и проводим суммирование:
. На следующем шаге свернем (6.1) по паре индексов k и q. Для этой цели мы заменяем их на и проводим суммирование:
![]() (6.2)
(6.2)
В целом вся операция (6.2) называется поднятием индекса. Эта операция обратима. Обратная операция называется опусканием индексов:
![]() (6.3)
(6.3)
Подобно (6.2), операция опускания индекса (6.3) включает в себя две операции над тензорами: тензорное произведение и свертку.
§7.Тензоры в криволинейных координатах
Мы будем рассматривать область ![]() аффинного пространства, отнесенную к криволинейным координатам
аффинного пространства, отнесенную к криволинейным координатам ![]() . Радиус-вектор х произвольной точки М области
. Радиус-вектор х произвольной точки М области ![]() , отсчитываемый от фиксированной точки О, будет выражаться функцией
, отсчитываемый от фиксированной точки О, будет выражаться функцией
![]() (7.1)
(7.1)
достаточное число раз непрерывно дифференцируемой. В дальнейшем мы предполагаем, что все рассматриваемые точки принадлежат области ![]() .
.
Для ориентации в строении данной координатной системы весьма полезны координатные линии. Так мы будем называть кривые, вдоль которых меняется лишь одна из координат ![]() а остальные остаются постоянными. Рассмотрим, например, координатную линию
а остальные остаются постоянными. Рассмотрим, например, координатную линию ![]() . Это значит, что
. Это значит, что ![]() закреплены на постоянных значениях, так что радиус-вектор х (7.1) остается функцией одного лишь
закреплены на постоянных значениях, так что радиус-вектор х (7.1) остается функцией одного лишь ![]() ; мы получаем кривую, отнесенную к параметру
; мы получаем кривую, отнесенную к параметру ![]() .
.
Через каждую точку М пройдет одна и только одна координатная линия ![]() , именно, если
, именно, если ![]() закрепить на значениях, которые они имеют в точке М. Частная производная
закрепить на значениях, которые они имеют в точке М. Частная производная ![]() дает касательный вектор к координатной линии
дает касательный вектор к координатной линии![]() . Все сказанное справедливо и для любых координатных линий, так что через каждую точку М проходят п координатных линий с касательными векторами
. Все сказанное справедливо и для любых координатных линий, так что через каждую точку М проходят п координатных линий с касательными векторами ![]() . Эти векторы мы будем обозначать кратко
. Эти векторы мы будем обозначать кратко
![]() (7.2)
(7.2)
Они, как мы знаем, всегда линейно независимы, и потому в каждой точке М могут быть приняты за векторы аффинного репера ![]() Таким образом, задание криволинейных координат в области
Таким образом, задание криволинейных координат в области ![]() влечет появление в каждой ее точке М вполне определенного аффинного репера
влечет появление в каждой ее точке М вполне определенного аффинного репера ![]() Этот аффинный репер мы будем называть локальным репером в точке М.
Этот аффинный репер мы будем называть локальным репером в точке М.
Когда в качестве частного случая криволинейных координат мы берем аффинные координаты, функция (7.1) принимает вид:
![]() (7.3)
(7.3)
и локальный репер в каждой точке М имеет те же векторы, что и основной репер, на котором построена данная аффинная координатная система.
Для рассмотрения локальных реперов имеются глубокие основания. Именно вспомним те простые свойства, которыми обладали аффинные координаты точек: приращения этих координат при переходе из точки ![]() в точку
в точку ![]() выражали координаты вектора смещения
выражали координаты вектора смещения ![]() :
:
![]()
поскольку

(говоря о координатах вектора, мы всегда будем иметь в виду его аффинные координаты; криволинейные координаты для векторов не имеют смысла). В этом, можно сказать, и состояла сущность аффинных координат точек.
Для криволинейных координат ![]() эти простые свойства теряются. Однако мы находим их снова, если рассматривать криволинейные координаты в бесконечно малой окрестности данной точки М.
эти простые свойства теряются. Однако мы находим их снова, если рассматривать криволинейные координаты в бесконечно малой окрестности данной точки М.
Смещаясь из точки ![]() в бесконечно близкую точку
в бесконечно близкую точку ![]() ,мы находим вектор смещения
,мы находим вектор смещения ![]() , как приращение радиуса вектора х точки М:
, как приращение радиуса вектора х точки М:
![]()
Пренебрегая бесконечно малыми высшего порядка, заменяем приращение полным дифференциалом и получаем:
![]() (7.4)
(7.4)
Это значит, что вектор смещения ![]() в локальном репере
в локальном репере ![]() имеет координа-ты, равные приблизительно приращениям
имеет координа-ты, равные приблизительно приращениям ![]() .
.
Итак, для бесконечно малых смещений из точки М приращения криволинейных координат ![]() снова выражают координаты вектора смещения
снова выражают координаты вектора смещения ![]() , если эти последние вычислять в локальном репере в точке М, пренебрегая бесконечно малыми высшего порядка.
, если эти последние вычислять в локальном репере в точке М, пренебрегая бесконечно малыми высшего порядка.
Таким образом, при помощи локального репера криволинейным координатам возвращаются свойства аффинных координат, правда, теперь уже лишь в бесконечно малой окрестности данной точки.
Можно сказать также, что приращения ![]() криволинейных координат в бесконечно малой окрестности точки М совпадают с точностью 1-го порядка с аффинными координатами относительно локального репера, построенного в точке М.
криволинейных координат в бесконечно малой окрестности точки М совпадают с точностью 1-го порядка с аффинными координатами относительно локального репера, построенного в точке М.
Естественно, что, занимаясь геометрией аффинного пространства в криволинейных координатах, мы постоянно будем сталкиваться с локальными реперами.
Выясним теперь, что происходит с локальными реперами, когда криволинейные координаты подвергаются преобразованию
![]() (7.5)
(7.5)
которое предполагается однозначно обратимым и непрерывно дифференцируемым в обе стороны. Выражая, обратно,
![]() (7.6)
(7.6)
мы можем считать в уравнении (7.1) радиус-вектор х сложной функцией от ![]() . Частная производная по
. Частная производная по ![]() выразится тогда по известной формуле:
выразится тогда по известной формуле:
![]()
В правой части по i, конечно, происходит суммирование. Заметим, что мы будем без стеснения прилагать обычные формулы дифференцирования к выражениям, содержащим векторы, так как справедливость этих формул устанавливается тривиальным образом: достаточно свести дифференцирование векторов к дифференцированию их координат. Окончательно получаем:
![]() (7.7)
(7.7)
Итак, преобразование криволинейных координат влечет за собой преобразование локального репера в каждой точке М, причем векторы нового локального репера разлагаются по векторам старого с коэффициентами  .Сравнивая с нашей прежней записью преобразования аффинного репера
.Сравнивая с нашей прежней записью преобразования аффинного репера
![]()
мы видим, что (7.7) представляет собой ее частный случай, когда
![]() (7.8)
(7.8)
а роль векторов ![]() играют
играют ![]() .
.
Рассмотрим теперь произвольное тензорное поле, например, ![]() . Точка М может при этом пробегать всю область
. Точка М может при этом пробегать всю область ![]() или только некоторую поверхность в ней, или даже линию в зависимости от того, где тензорное поле задано.
или только некоторую поверхность в ней, или даже линию в зависимости от того, где тензорное поле задано.
Координаты тензора ![]() можно вычислять относительно любого аффинного репера. Однако в дальнейшем мы всегда будем считать, что аффинное пространство (по крайней мере в пределах области
можно вычислять относительно любого аффинного репера. Однако в дальнейшем мы всегда будем считать, что аффинное пространство (по крайней мере в пределах области ![]() ) отнесено к каким-либо криволинейным координатам
) отнесено к каким-либо криволинейным координатам ![]() . Тогда в каждой точке М возникает локальный репер, и координаты тензора
. Тогда в каждой точке М возникает локальный репер, и координаты тензора ![]() мы будем брать относительно именно этого репера. Эти координаты мы будем кратко называть координатами тензора
мы будем брать относительно именно этого репера. Эти координаты мы будем кратко называть координатами тензора ![]() в данной системе криволинейных координат
в данной системе криволинейных координат ![]() .
.
Когда в дальнейшем мы будем говорить о тензорном поле
![]() (76.9)
(76.9)
то всегда будем подразумевать сказанное выше.
Если тензорное поле задано не во всей области ![]() , а лишь на некоторой поверхности (линии), то в уравнениях (7.9)
, а лишь на некоторой поверхности (линии), то в уравнениях (7.9) ![]() нужно задавать, конечно, как функции параметров этой поверхности (линии). Тензорное поле может выродиться и в задание тензора
нужно задавать, конечно, как функции параметров этой поверхности (линии). Тензорное поле может выродиться и в задание тензора ![]() в одной только точке М.
в одной только точке М.
Вслед за преобразованием криволинейных координат происходит преобразование локального репера в каждой точке М, а значит, и преобразование координат тензора ![]() по обычному тензорному закону:
по обычному тензорному закону:
![]() (7.10)
(7.10)
При этом, как мы видели, матрица ![]() совпадает с матрицей
совпадает с матрицей ![]() , а следовательно, обратная матрица
, а следовательно, обратная матрица ![]() - с матрицей
- с матрицей ![]() :
:
![]() =
=![]() . (7.11)
. (7.11)
Следовательно, закон преобразования (7.10) принимает вид
![]() (7.12)
(7.12)
Таким образом, переход от одних криволинейных координат к другим, влечет за собой преобразование координат тензорного поля ![]() по закону (7.12). При этом частные производные
по закону (7.12). При этом частные производные ![]() по
по ![]() и обратно берутся в той же точке М, как и координаты тензора, что и отмечено в записи.
и обратно берутся в той же точке М, как и координаты тензора, что и отмечено в записи.
§8. Примеры вычислений
Пример1 (Динамика частицы)
В качестве простого приложения тензорного исчисления чуть переформулируем уравнения классической динамики материальной точки.
Второй закон Ньютона ![]() в компонентах записывается как
в компонентах записывается как
![]() (8.1)
(8.1)
Откуда сразу видна его ковариантность по отношению к преобразованиям из группы О (3). Если силовое поле потенциально, то
![]() (8.2)
(8.2)
Умножая обе части (8.1) на ![]() и свертывая по индексам, получим
и свертывая по индексам, получим

т.е.
 (8.3)
(8.3)
Вводя кинетическую энергию частицу ![]() и элементарную работу силы
и элементарную работу силы ![]() , придем к теореме живых сил.
, придем к теореме живых сил.
![]() (8.4)
(8.4)
Инвариантной относительно ортогональных преобразований. Для потенциального стационарного поля сил и