


Мехатронная система обеспечения заданной скорости электровоза на различных участках пути
Мехатронная система – это неразделимая совокупность механических, электромеханических и электронных узлов, в которых осуществляется преобразование и обмен энергии, информации. В современных мехатронных системах преобразование движения одного или нескольких тел в требуемые движения других тел осуществляется системой тел (деталей), называемых механизмов. Механизмы входят в состав машин – технических систем и предназначены для осуществления механических движений по преобразованию потоков энергии, силовых взаимодействий, необходимых для выполнения различных рабочих процессов. Часто силовой основой МС является электропривод постоянного и переменного тока, формирующих управляемую электромеханическую систему широкого назначения. Для ЭМС управления характерна тесная взаимосвязь электромеханической части с энергетическим каналом питания и каналом управления, что обуславливает ожидаемые характеристики проектируемого устройства часто в равной степени всеми функциональными звеньями. Управляемые комплексы с электрическим приводом (система, состоящая из двигателя и связанных с ним устройств, приведения в движение одного или нескольких исполнительных механизмов, входящих в состав МС) получили название электромеханических систем (ЭМС).
Создание нового образца МС обычно сопровождается использованием в разнообразных вариантах гибких технологических решений. Разновидностью этого принципа является модульный подход. Модули могут легко соединяться, образуя сложные технические системы, разъединяться, заменяться с целью формирования ТС с другими компонентами и техническими характеристиками при необходимости модернизации и ремонта. В общем случае модуль характеризуется конструктивной и технологической завершенностью, обладает строго фиксированными параметрами (функциональными характеристиками, геометрическими размерами).
1 Обзор существующих систем управления электровозом
Под прямым цифровым управлением понимается не только непосредственное управление от микроконтроллера каждым ключом силового преобразователя (инвертора и управляемого выпрямителя), но и обеспечение возможности прямого ввода в микроконтроллер сигналов различных обратных связей (независимо от типа сигнала: дискретный, аналоговый или импульсный) с последующей программно-аппаратной обработкой внутри микроконтроллера.
Таким образом, система прямого цифрового управления ориентирована на отказ от значительного числа дополнительных интерфейсных плат и создание одноплатных контроллеров управления приводами, в том числе тяговыми электродвигателями.
Из этого становится ясно, что все существующие системы управления тяговом подвижном составе морально устарели и не обеспечивают современных требований. Необходимо переходить на специализированные одноплатные микроконтроллеры, содержащие в себе все функции обработки сигналов и выдачи управляющих воздействий.
В настоящее время во всем мире происходит обновление и модернизация подвижного состава с использованием цифровых технологий. «Цифра» на сегодняшний день является более экономичным, надежным и перспективным решением нежели обработка, и преобразование аналогового сигнала.
Разработана микропроцессорная аппаратура, предназначенная для управления электроприводом с коллекторным тяговым двигателем, которая успешно применяется в электровозах ЭП1. Она хорошо себя зарекомендовала. По данным Хабаровского и Красноярского локомотивных депо, куда поступили первые электровозы ЭП1, за первые полгода эксплуатации не было ни единой остановки в пути следования по вине микропроцессорной аппаратуры. По данным того же Красноярского локомотивного депо режим рекуперации на ЭП1 дает до 30% экономии электроэнергии. Эффект применения новых технологий виден уже через полгода эксплуатации:
§ Аппаратура не требует подстроек – снижение простоев и эксплуатационных расходов;
§ Устойчивая рекуперация во всех режимах – экономия электроэнергии
§ и сокращение износа тормозных колодок.
§ Возможность диагностирования оборудования – быстрый поиск
§ неисправностей. Недостатками системы являлись:
§ Громоздкость. Вид такой системы представлен на рисунке 1.1.
§ Высокая стоимость. В производстве такой системы использовались
§ платы фирмы Octagon Systems
§ Сложность ремонта из-за большого количества плат.
1.1 Блок автоматического управления
Блок автоматического управления выпрямительно-инверторными преобразователями электровозов переменного тока (БАУВИП) предназначен для управления тяговым электроприводом электровозов как в «ручном», так и в автоматическом режимах. Внешний вид блока автоматического управления представлен на рисунке 1.1
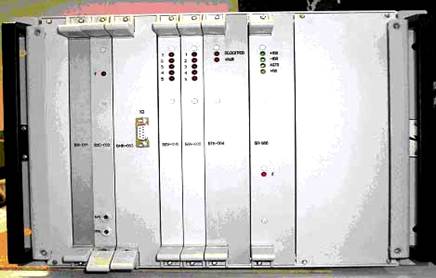
Рисунок 1.1 – Блок автоматического управления
При модернизации с электровозов снимаются блоки БУВИП-113, 133 и БАУ-002 с истекшим сроком службы (15 лет) и ставится один блок БАУВИП на каждую секцию, выполняющий те же функции. Он имеет существенно меньшие габариты, меньшее количество элементов и большую надежность, оснащен встроенными элементами диагностирования. БАУВИП от серийной МСУД отличается меньшим количеством элементов, отсутствием дисплейных модулей, за счет чего имеет существенно меньшую стоимость.
Факторы, образующие экономический эффект:
§ повышение стабильности и точности по фазе импульсов управления – экономия расхода электроэнергии на тягу и увеличение возврата электроэнергии в контактную сеть;
§ снижение затрат на обслуживание; снижение расходов на ремонт.
Состав блока автоматического управления:
§ Блок микропроцессорного контроллера БМК-036
§ Блок входных сигналов БВС-002
§ Блок формирователей БФ-043
§ Блок ввода-вывода БВВ-041
§ Блок аналого-цифрового преобразователя БАЦП-037
§ Два блока выходных усилителей БВУ-005
§ Блок питания БП-042
§ Блок теплового контроля БТК-004
§ Панель питания ПП-474
1.1.1 Описание съемных блоков системы управления
Съемный блок микропроцессорного контроллера БМК-036 предназначен для:
§ программного расчета и выдачи импульсов управления тиристорами выпрямительно-инверторным преобразователем и выпрямителем управляемым возбуждения в соответствии с алгоритмом управления;
§
§ выдачи сигналов управления устройствами.
Съемный блок формирователей БФ-043 предназначен для согласования уровней входных сигналов управления и информационных сигналов, подаваемых от электровозного оборудования, с уровнями сигналов, которые допускается подавать в съемный блок микроконтроллера БМК-036.
Съемный блок входных сигналов БВС-002 предназначен для синхронизации работы элементов МПСУ и системы фазового управления ВИПа и ВУВов с напряжением контактной сети.
Съемный блок импульсных выходных усилителей БВУ-005 предназначен для усиления импульсных сигналов управления тиристорами силовой выпрямительной установки, выдаваемых блоком микроконтроллера.
Блок теплового контроля БТК-004предназначен для управления подогревом блока.
Блок питания БП-042 предназначен для формирования из бортовой сети питания постоянного напряжения +50 В электровоза стабилизированных напряжений, необходимых для питания аппаратуры.
Панель питания ПП-474 предназначена для выполнения привязки модернизированного блока управления выпрямительно-инверторными преобразователями (БАУВИП) к цепям питания и управления электровоза.
1.1.2 Основные технические характеристики
| Номинальное напряжение питания переменного тока, В | 220 |
| Пределы изменения напряжения, В | 198-242 |
| Частота напряжения питания, Гц | 50 |
Потребляемая мощность: | |
| -для цепей контроля и управления, Вт | не более 50 |
| -для подогрева при температуре окружающего воздуха, ниже – 40°С, Вт | не более 150 |
| Режим работы | продолжительный |
| Охлаждение | естественное |
Масса: | |
| Блок в сборе, кг | 32 |
1.2 Микропроцессорная система управления и диагностики (МСУД) электровозом ЭП1
Микропроцессорной системы управления и диагностики (МСУД) выполняет автоматическое управление электроприводом и электрическими аппаратами серийного электровоза ЭП1 в режимах тяги и торможения. При этом аппаратура МСУД обеспечивает: разгон электровоза до заданной скорости с заданной и автоматически поддерживаемой величиной тока якоря тяговых электродвигателей и последующее автоматическое поддержание заданной скорости, рекуперативное торможение до заданной скорости с последующим автоматическим поддержанием заданной скорости на спусках, автоматическое плавное торможение с учетом тормозных характеристик до полной остановки электровоза, защиту от буксования и юза колесных пар, автоматическую непрерывную диагностику состояния электрооборудования электровоза, стыковку микропроцессорных контроллеров с блоками АСУ безопасности, подключение микропроцессорных контроллеров к IBM PC совместимым персональным компьютерам для отладки рабочих программ и моделирования процесса управления. Требования к организации обмена, составу, кодированию информации и характеристикам электрических сигналов в магистральном канале соответствуют стандарту RS-485 (многоабонентской «токовой петле») Аппаратура микропроцессорной системы управления и диагностики электрооборудования электровоза построена на программных принципах обработки информации с использованием микропроцессорных контроллеров Micro PC. Внешний вид шкафа представлен на рисунке 1.2
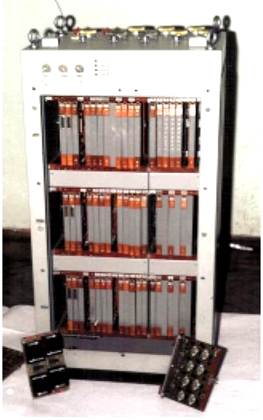
Рисунок 1.2 – Внешний вид шкафа МСУД
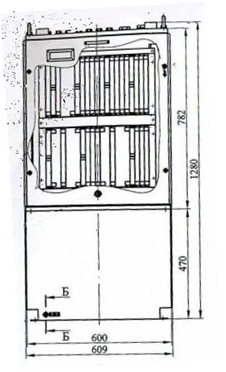
Рисунок 1.3 – Схема микропроцессорной системы управления и диагностики
Схема и габаритные размеры микропроцессорной системы управления и диагностики (МСУД) представлена на рисунке 1.3
1.2.1 Состав аппаратуры МСУД
Состав аппаратуры МСУД электровоза ЭП1 приведен в таблице 1, электровоза ВЛ80ТК(СК) - в таблице 2.
Таблица 1
Аппаратура МСУД | Состав аппаратуры МСУД | ||
| Шкаф | Блок индикации | Кабель | |
| МСУД1.2 | Шкаф МСУД1.2 – 4шт. | Блок БИ1.2 – 2шт. или Блок БИ1.5 – 2шт. | Кабель 41 – 1шт. Кабель 42 – 1шт. |
Таблица 2
Аппаратура МСУД | Состав аппаратуры МСУД | ||
| Шкаф | Блок индикации | Кабель | |
| МСУД1.4 | Шкаф МСУД1.4– 4шт. | Блок БИ1.4– 2шт. или Блок БИ1.6– 2шт. | Кабель 42 – 1шт. |
1.2.2 Технические характеристики
§ Аппаратура микропроцессорной системы управления и диагностики электрооборудования электровоза построена на программных принципах обработки информации с использованием микропроцессорных контроллеров Micro PC.
§ Требования к организации обмена, составу, кодированию информации и характеристикам электрических сигналов в магистральном канале соответствуют стандарту RS-485 (многоабонентской «токовой петле»).
§ Скорость передачи информации по магистральному каналу -до 56 Кбит/с.
§ Разрядность центрального процессора - 32. Быстродействие - 800 тыс. оп/с.
§ Емкость оперативного запоминающего устройства - не менее I Мб
§ Емкость постоянного запоминающего устройства - не менее 512 Кб.
§ Количество внешних запросов прерываний - 4.
§ Количество входных аналоговых сигналов - 20. Разрядность интегрирующего аналого-цифрового преобразователя - 12. Уровень входных сигналов - от 0 до 10В.
§ Количество каналов ввода дискретных сигналов в контроллере МПК1 (МПК2) - 24; в контроллере ЦМК - 48. Уровень дискретных сигналов: логический 0 - от 0 до +1 В; логическая 1 - от +30 до +80 В.
§ Количество выходных дискретных сигналов - 36, в том числе в ЦМК - 12. Напряжение коммутации до +80 В, ток активной нагрузки до 1,5 А.
§ Количество выходных импульсных сигналов - 16. Амплитуда выходных импульсов не менее 20 В на нагрузке 68 Ом.
§ Количество каналов программируемых таймеров - 16. Выходной сигнал - импульс длительностью 40 - 100 мкс.
§ Последовательный интерфейс по стыку RS-232 в контроллере ЦМК - 5 каналов; в контроллерах МПК1, МПК2 по одному каналу.
§ Входное напряжение питания 50 В постоянного тока с пределами изменения от 35 до 70 В.
§ Вероятность безотказной работы МСУД в течение 4000 час. (200000 км пробега электровоза) не менее 0,99.
§ Ремонтопригодность МСУД обеспечивается наличием встроенных средств технического диагностирования, ЗИП и конструктивным исполнением, позволяющим оперативно осуществить замену отказавших съемных элементов исправными из состава ЗИП, а также проведение необходимого технического обслуживания.
§ Время готовности МСУД к работе с момента включения при температуре окружающего воздуха выше минус 35 °С не превышает 10 минут, при температуре окружающего воздуха ниже минус 35 °С не превышает 30 минут.
§ Аппаратура МСУД нормально функционирует при воздействии внешних климатических факторов:
× температура окружающей среды для аппаратуры, расположенной в кузове электровоза от минус 50 до + 60 °С, для блоков БИ1.2 - от минус 25 до + 60°С;
× скорость возрастания температуры окружающего воздуха при запуске электровоза в работу до 1 град/мин;
× скорость спада температуры окружающего воздуха после окончания работы электровоза до 2 град/мин;
× относительная влажность воздуха до 100 % при температуре 20 °С;
× возможность выпадения инея;
× тип атмосферы II по ГОСТ 15150-69;
× наличие пыли с концентрацией до 20 мг/куб. м;
× максимальная высота над уровнем моря до 1400м.
§ В части воздействия внешних механических факторов МСУД соответствует группе М25 по ГОСТ 17516.1-90Е:
× синусоидальная вибрация в диапазоне частот 0,5 - 100 Гц с максимальной амплитудой ускорений I § в любом из трех взаимно перпендикулярных направлений;
× одиночные удары в одном горизонтальном направлении с пиковым ударным ускорением 3g и длительностью ударного ускорения 2-20 мс.
2 Объект модернизации
2.1 Преобразователь выпрямительно-инверторный ВИП-5600 УХЛ2
Выпрямительно-инверторный преобразователь (ВИП) предназначен, для выпрямления однофазного переменного тока частотой 50 Гц в постоянный и плавного регулирования напряжения питания тяговых двигателей в режиме тяги и для преобразования постоянного тока в однофазный переменный ток частотой 50 Гц и плавного регулирования величины противо-э.д.с. инвертора в режиме рекуперативного торможения.
На электровозе устанавливается два преобразователя. Каждый ВИП состоит из блока силового (БС),блока питания (БП) и блока диагностики (БД).
Технические данные:
Номинальное входное напряженна, БС, В 1570
Входная частота, Гц 50
Номинальное входное напряжение БП, В 330
Номинальное входное напряжение БД, В 50
Номинальное выходное напряжение, В 1400
Номинальный выходной ток, А 4000
Номинальная выходная активная мощность, кВт 5600
Номинальное выходное напряжение БП, В 24
Номинальная выходная мощность БП, Вт 600
Параметру импульсов на выходе СФИ:
Амплитуда напряжения основного импульса, В 10
Амплитуда напряжения форсажного импульса, В 20
Длительность импульса на уровне 0,1 мкс 650
Амплитуда напряжения основного импульса в цепях управления
силовых тиристоров, В 7
Коэффициент полезного действия, % 98,6
Масса БС, кг 1250
Масса БП, кг 2
Масса БД, кг 5
Охлаждение воздушное принудительное
Количество охлаждающего воздуха, м³/мин 330
Силовая часть ВИП имеет 8 плеч и выполнена по схеме в соответствии с рисунком 2.1. Каждое плечо ВИП состоит из двух последовательно и пяти параллельно соединенных тиристоров. Плечи укомплектованы тиристорами Т353-800. При этом плечи 1,2,7,8 укомплектованы тиристорами 28 класса с неповторяющимся импульсным напряжением в закрытом состоянии не ниже 3800 В; плечи 3,4,5,6-тиристорами 32 класса. Конструктивно блоки тиристоров расположены по высоте пять, а по горизонтали -по восемь штук.
Силовая схема ВИП позволяет реализовать четырехзонное регулирование выпрямленного напряжения при трех секциях вторичной обмотки тягового трансформатора.
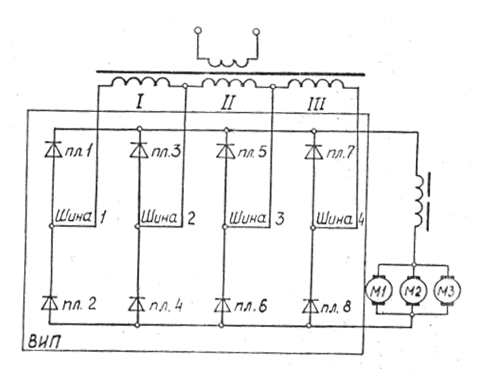
Рисунок 2.1 – Функциональная схема ВИП
Выравнивание тока по параллельным ветвям плеч обеспечивается подбором тиристоров по суммарному падению напряжения и также диагональным подключением плеч.
Допустимый разброс по суммарному падении напряжения между параллельными ветвями плеч при токе 400 А должен составлять не более 0,04 В.
Система формирования импульсов служит для включения тиристоров силовой схемы ВИП, которая управляется аппаратурой управления электровоза.
Параметры сигнала, подаваемого на вход СФИ, должны иметь следующие значения:
Амплитуда напряжения, не менее, В 18
Амплитуда тока, не менее, А 0,2
Амплитуда импульсов тока на уровне 0,5 амплитуды, не менее 30
Скорость нарастания управляющего тока, не менее, А/мкс 0,1
Блок питания обеспечивает напряжением блоки управления СФИ. Блок питания запитан от обмотки собственных нужд тягового трансформатора электровоза.
БП представляет собой транзисторный стабилизатор напряжения с параллельным: регулирующим элементом. Стабилизатор позволяет с заданной точностью поддерживать постоянное .напряжение на выходе при изменении входного напряжения в пределах 250-4700 В.
Блок диагностики служит для контроля наличия пробитых тиристоров в плечах БС, пробитых транзисторов в БП и СФИ, подачи запускающих импульсов для БУ при диагностировании работы СФИ, а так же позволят контролировать алгоритм работы плеч ВИП при работе его на холостом ходу или под нагрузкой.
2.2 Выпрямительная установка возбуждения ВУВ-118
Выпрямительная установка возбуждения ВУВ-118 предназначена для выпрямления однофазного переменного тока частотой 50 Гц в постоянный и плавного регулирования тока в обмотках возбуждения тяговых двигателей при электрическом торможении.
Технические данные:
Рабочее положение вертикальное
Номинальная мощность питания цепей управления, не более, Вт 250
Напряжение силовых целей относительно "земли"
и цепей управления, В 1500
Амплитуда напряжения импульсов управления на выходе,
не менее, В 20
Длительность импульсов управления на входе на уровне 0,5 амплитуды не менее, мкс 20
Напряжение питания постоянного (пульсирующего)тока цепей
управления, В 50
Номинальное напряжение питания переменного тока
(эффективное значение), В 2×270
Допустимое отклонения питающего напряжения, В 2×(100-330)
Допустимые перенапряжения на силовых выводах,
не более, В 1600
Номинальный продолжительный выпрямленный ток
(среднее значение), А 850
Ток выпрямленный 5-ти минутного режима с холодного состояния,
не более, А 308
Масса, кг 147
Выпрямительная установка возбуждения представляет собой двухполупериодный управляемый тиристорный выпрямитель, собранный по схеме с нулевой точной. Каждое плечо выпрямителя состоит из трех тиристоров, включенных параллельно.
На лицевой панели блока, размещены съемные блоки тиристоров 2,4.В каждом блоке находится силовой тиристор 10 с охладителем 11 и элементы защищающие тиристор от перенапряжения и помех.
Каркас состоит из металлического сварного основания 19. боковые панели образуют воздуховод.
Охладитель расположен в воздуховоде и охлаждается нагнетаемым воздухом. На боковых панелях расположены индуктивные делители 6, слева и справа установлены предохранители 20. Тиристоры, индуктивные делители и предохранители соединены шинным монтажом. Напряжение подводится шинами 1,3,5. Усилители-формирователи импульса управления силовыми тиристорами обоих плечей размещены на одной панели управления 22.
Блок ПКБ предназначен для установки в него съемного устройства регистрации (кассеты ЭН). На широкой стороне блока находятся направляющие для установки кассеты на оптический узел. На задней стенке устройства закреплен разъем для подключения электрической линии связи с аппаратурой МСУД.
Габаритные размеры блока 136x130x35 мм.
Описание блока ПКБ, кассеты ЭН и устройства обработки информации регистраторов ПКС изложены в руководстве по эксплуатации аппаратуры.
Инструкция для ввода данных о временных ограничениях скорости, регистрации диагностической информации и обработки зарегистрированной информации изложена в приложении А.
2.3 Шунтирующие устройства ШУ-001, ШУ-003
Шунтирующие устройства предназначены для гашения энергии, запасенной в катушках аппаратов, при отключении катушек от источников питания.
Технические данные:
Максимальное импульсное напряжение между
выводами в прямом направлении, В 8000
Номинальное напряжение постоянного (пульсирующего) тока между выводами в обратном направлении, В 500
Масса ШУ-001,кг 0,008
Масса ШУ-003,кг 0,015
Шунтирующее устройство представляет собой цепь, состоящую из последовательно соединенных диода V типа КД209 В и резистора R С2-ЗЗН-2-1кОм±10% с наконечниками 2 для подключения к выводам катушек. В шунтирующем устройстве ШУ-003 для увеличения длины цепочки элементу соединены с помощью проволоки 1 ММ-1,0.Вывод с маркировкой на трубке "Ж" подключается к выводу' катушки, связанному с "землей".
Шунтирующее устройство ШУ-001 представлено в соответствии с рисунком 2.2,а шунтирующее устройство ШУ-003-с рисунком 2.3.
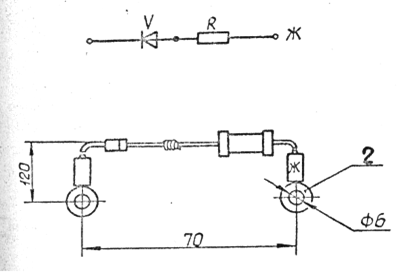
Рисунок 2.2 – Шунтирующее устройство ШУМ-001.Схема электрическая и габаритный чертеж.
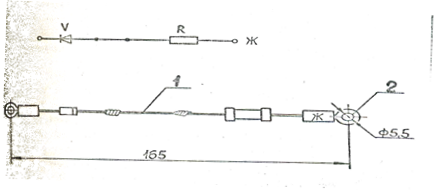
Рисунок 2.3 – Шунтирующее устройство ШУМ-003.Схема электрическая и габаритный чертеж.
2.4 Описание микропроцессорной системы управления и диагностики электровоза (МСУД)
ЦМК обеспечивает обмен информацией между контроллерами управления и пультами машиниста, диагностику состояния электрооборудования и связь с приборами АСУБ по стыку RS-232.МПК1 или МПК2 последовательно опрашивает состояние входных сигналов от объекта управления, вычисляет значения выходных управляющих воздействий по программе, соответствующей алгоритму управления приводом и другим оборудованием электровоза. В аппаратуре предусмотрен встроенный непрерывный контроль, обеспечивающий проверку ее исправности. При возникновении отказов отдельных компонентов аппаратура либо сохраняет работоспособность, либо передает сообщение в блок БИ1 о необходимости переключиться на другой МПК.
Блок входных фильтров обеспечивает сглаживание пульсаций и кратковременных провалов входного напряжения питания аппаратуры.
2.4.1 В состав ЦМК входят следующие функциональные узлы:
- ячейка микропроцессорного контроллера МК3.1 ( Octagon Systems 6010 ), предназначенная для программной обработки информации, управления приемом-выдачей сигналов обмена с элементами ввода-вывода, сопряжения с внешними устройствами по стыку RS-232;
- две ячейки ввода дискретных сигналов ДИЗ, предназначенные для ввода в контроллер сигналов дискретных датчиков;
- ячейка преобразователей уровней ПУ1.1, предназначенная для гальванической развязки и согласования уровней сигналов цепей шкафа МСУД с цепями ячейки МКЗ, а также выдачи напряжения +5 В для питания энергонезависимого регистратора;
- ячейка вывода дискретных сигналов УДЗ, предназначенная для выдачи управляющих воздействий на дискретные исполнительные механизмы;
- ячейка питания СН5, предназначенная для преобразования напряжения
бортсети 50 В постоянного тока в напряжение +5 В питания узлов аппаратуры, а также для управления подогревом аппаратуры при работе в условиях низких температур;
- блок резисторов БР1, предназначенный для подогрева аппаратуры при работе в условиях низких температур.
2.4.2 В состав МПК1 (МПК2) входят следующие функциональные узлы:
- ячейка микропроцессорного контроллера МКЗ, предназначенная для программной обработки информации, управления приемом-выдачей сигналов обмена с элементами ввода-вывода, ввода информации о состоянии частотных датчиков, выдачи импульсных команд фазового управления тиристорами ВИП и ВУВ, а также управления потоками информации между контроллерами шкафа МСУД и пультами машиниста;
- ячейка преобразователей уровней ПУ1.2, предназначенная для гальванической развязки и согласования уровней сигналов цепей шкафа МСУД с цепями ячейки МКЗ;
- ячейка аналого-цифрового преобразователя АЦ2, предназначенная для интегрирующего преобразования аналоговых сигналов в параллельный 16-разрядный код;
- ячейка ввода дискретных сигналов ДИЗ;
- ячейка ввода аналоговых сигналов и фазовой синхронизации ВФС, предназначенная для формирования по потенциальным условиям начальных углов α0, α0зад, α0ср и γр, а также для формирования сигнала синхронизации процедур ввода/вывода и обработки информации микропроцессорным контроллером;
- две ячейки вывода дискретных сигналов УДЗ;
- ячейка ВФЗ, предназначенная для формирования сигналов γmax, Uси, Uсл1 и Uсл2, необходимых для работы ячейки ВФС;
- ячейка выходных усилителей УВЗ, предназначенная для усиления импульсов управления ВИП;
- ячейка выходных усилителей УВ4, предназначенная для усиления импульсов управления ВУВ;
- ячейка питания СН4, предназначенная для преобразования напряжения бортсети 50 В постоянного тока в напряжения +5 В и +30 В питания узлов аппаратуры и в напряжения +15 В и минус 15 В питания датчиков тока, а также для управления подогревом аппаратуры при работе в условиях низких температур;
- блок резисторов БР2.
2.4.3 Устройство и состав ячеек шкафа МСУД 1.4
аналогично шкафу МСУД 1.2 за исключением установки двух ячеек ПУ2.1, ПУ2.2 вместо ячеек ПУ1.1 и ПУ1.2.
2.5 Ячейки шкафа МСУД
2.5.1 Ячейка микропроцессорного контроллера МКЗ
предназначена для программной обработки информации, управления приемом-выдачей сигналов обмена с элементами ввода-вывода, аналого-цифрового преобразования в соответствии с программами, записанными в ПЗУ, а также для ввода информации о состоянии частотных датчиков и выдачи импульсных команд фазового управления тиристорами ВИП и ВУВ. Внешний вид ячейки МК3 представлен на рисунке 2.4.
Ячейка состоит из следующих функциональных узлов:
- процессорная плата 6010 (6020) на помехоустойчивой КМОП-структуре;
- узел буферизации системной шины;
- узел дешифратор адреса;
- узел измерителя скорости;
- входной буфер сигналов от датчиков скорости;
- формирователи сигналов управления ВИП и ВУВ;
- узлы буферизации сигналов управления ВУВ и ВИП:
- узлы буферизации локальной шины данных и локальной шины управления ячейки УДЗ;
- узел индикации;
- узел формирования сигнала «отказ процессора».
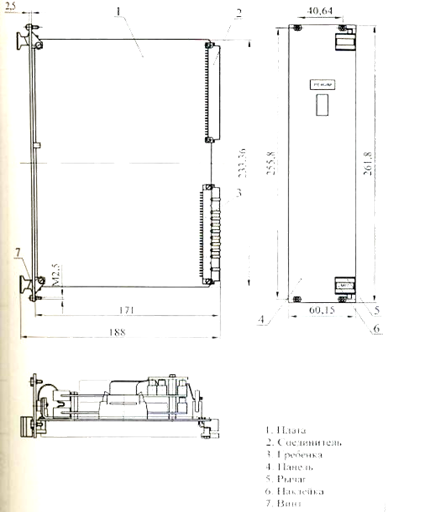
Рисунок 3 – Внешний вид ячейки МК3.
Плата 6010 (рисунок 2.5) предназначена для программной обработки информации и содержит:
- процессор 386SХ, 25 МГц фирмы Intel;
- встроенную операционную систему DOS в ПЗУ;
- Phoenix BIOS с расширениями;
- флэш-ПЗУ объемом 1 Мбайт с файловой системой;
- статическое ОЗУ объемом 128 к
байт, обеспечивающее энергонезависимую память с неограниченными циклами считывания и записи;
- динамическое ОЗУ 4 Мбайт;
- два порта последовательной связи СОМ1 (RS-232) м СОМ2 (RS-232);
- универсальный параллельный порт LPT1;
- сторожевой таймер;
- программу самодиагностики ПЗУ.
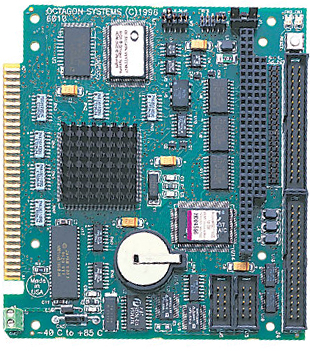
Рисунок 2.5 – Внешний вид платы Octagon Systems 6010
Последовательные порты СОМ1 и СОМ2 совместимы с 8250. Программируемая скорость передачи информации в бодах составляет от 150 до 115К бод. Оба порта имеют интерфейс RS-232.Узел буферизации системной шины обеспечивает усиление и обмен сигналами, формируемыми ячейкой, с системными ресурсами. Дешифратор адреса осуществляет формирование сигналов ВЫБОР1 ВЫБОР4, обеспечивающих подключение устройств ячейки МКЗ к шине данных DВ0...DВ7, а также формирование сигналов записи W1 . W5 и чтения R1…R5 локальной шины управления ячейкой УДЗ.Измеритель скорости предназначен для ввода информации от датчиков скорости, поступающей от ячейки ПУ1.2, а также для определения направления движения локомотива. Формирователи сигналов управления ВИП и ВУВ предназначены для выдачи импульсных команд управления силовыми тиристорными узлами электровоза в соответствии с программой, заложенной в ПЗУ платы 6010.
Узел индикации предназначен для отображения информации о режиме работы программного обеспечения на 7-ми сегментном индикаторе, находящемся на лицевой панели ячейки. Узел управляется сигналами LED1 ...LEDЗ от параллельного порта платы 6010.
Узел формирования сигнала «отказ процессора» предназначен для формирования импульсов, обеспечивающих включение сигнализации отказа микропроцессорного комплекта на блоке индикации аппаратуры МСУД
2.5.2 Ячейка МК3.1
отличается от ячейки МКЗ наличием платы расширения 5555. Плата имеет четыре последовательных порта СОМ4 - СОМ7 RS-232), совместимых с UART 16С55О.
2.5.3 Ячейка ПУ1
предназначена для гальванической развязки и согласования уровней сигналов цепей шкафа МСУД с цепями ячейки МКЗ. Ячейка состоит из следующих функциональных узлов:
- узел гальванической развязки сигналов от датчиков скорости;
- преобразователь интерфейса основного канала связи;
- преобразователь интерфейса резервного канала связи;
- узел связи с ПКБ;
- узел связи с САУТ;
- узел определения направления движения;
- узел контроля включения подогрева;
- скоростной канал связи между микропроцессорными комплектами;
- усилитель сигнала «отказ процессора»;
- гальванически развязанный источник напряжения для питания ПКБ.
Узел гальванической развязки предназначен для защиты и согласования сигналов от датчиков скорости с элементами ячейки МКЗ. Преобразователи интерфейсов RS-232 в RS-485 для основного и резервного канала связи служат для обмена информацией между блоком индикации, устанавливаемым в кабине машиниста и ячейкой МКЗ. В резервном канале связи имеется схема выдачи сигналов в канал отладки, которая обеспечивает соединение процессорной платы ячейки МКЗ с персональным компьютером для обновления и отладки программного обеспечения.
Узел связи с ПКБ передает сигналы интерфейса RS-232 от ячейки МКЗ через канал связи «токовая петля» в энергонезависимый накопитель ЭН. Узел связи с САУТ служит для обмена информацией через канал «токовая петля» между процессорной платой ячейки МКЗ и системой автоматического управления торможением локомотива. Узел контроля включения подогрева предназначен для преобразования напряжения питания цепей подогрева с уровнем 50 В в напряжение параллельного порта процессорной платы ячейки МКЗ с уровнем 5 В для контроля включения цепей подогрева.
Скоростной канал связи между микропроцессорными комплектами предназначен для оперативного обмена информацией между МПК и ЦМК в случае возникновения аварийных ситуаций. Усилитель сигнала «отказ процессора» предназначен для гальванической развязки и усиления сигнала «отказ», формируемого ячейкой МКЗ.
Гальванически развязанный источник 5-ти вольтового напряжения предназначен для питания накопителя ПКБ.
2.5.4 Ячейка ГТУ1.1
устанавливается в ЦМК и отличается от ПУ1 отсутствием узла гальванической развязки отдатчиков скорости и узла определения направления движения.
2.5.5 Ячейка ПУ1.2
устанавливается в МПК и отличается от ПУ1 отсутствием узлов связи с ПКБ и САУТ, узла контроля включения подогрева, а также источника напряжения для питания ПКБ.
2.5.6 Ее устройство
аналогично ячейке ПУI за исключением того, что в качестве преобразователя интерфейса основного канала связи в ней применен интерфейс многоабонентской «токовой петли».
2.5.7 Ячейка ввода дискретных сигналов ДИЗ
предназначена для побайтного ввода информации в микропроцессорный контроллер. Ячейка обеспечивает ввод 24 дискретных сигналов (3 байта). При этом наличию входного сигнала соответствует подача +50 В на входной контакт элемента. Внешний вид ячейки ДИ3 представлена на рисунок 2.
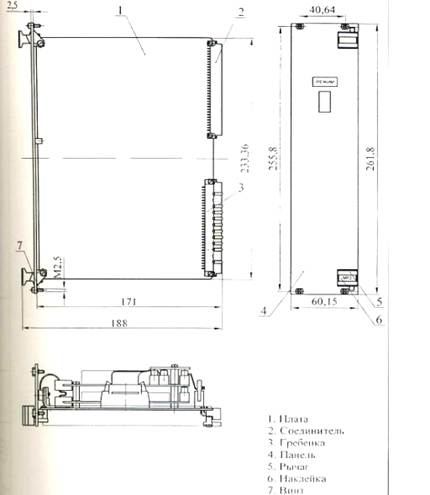
Рисунок 2.6 – Внешний вид ячейки ДИ3
Ячейка состоит из следующих узлов:
- дешифратор адреса;
- узел развязки входных цепей;
- входной узел, предназначенный для увеличения токовой нагрузки на контакты разъемов входных цепей;
- RС-фильтр;
- усилитель строба записи информации;
- регистр памяти входной информации;
- шинные формирователи для связи с шиной данных;
- узел потенциальной развязки;
- узел диагностики.
Выбор ячейки, выбор канала и считывание информации осуществляется подачей соответствующих внешних сигналов SАО, SА1, SА4 - SА9, АЕМ на входы дешифратора адреса.
Адрес ячейки формируется подключением цепей АВР4 - АВР9 к шине 0 В шкафа. При совпадении адреса формируется сигнал выбора ячейки и выходы регистра памяти входной информации через шинные формирователи подключаются к шине данных.
Занесение информации с входов ячейки в регистр происходит по сигналу, выдаваемому усилителем строба записи входной информации через 5 мс после прохождения сигнала СИ, отмечающего начало полупериода напряжения контактной сети. При этом, сигналы с входов через входные узлы. RС-фильтры и узлы потенциальной развязки поступают на входы регистра. Во входных цепях ячейки также имеется у