


Имитационное структурное моделирование системы
Северская Государственная Технологическая Академия
Имитационное структурное моделирование системы ЭПна ЦВМ с учетом нелинейностей
Северск2008
Цель работы
Методом цифрового имитационного моделирования исследовать переходные процессы в элементах электропривода и автоматической системе регулирования с учетом влияния нелинейного момента нагрузки.
Структурная и функциональная схемы системы
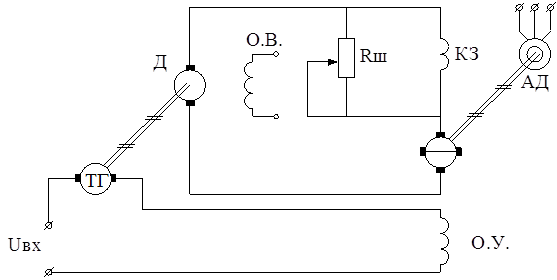
Рис. 1 – Функциональная схема системы “ЭМУ – Д”
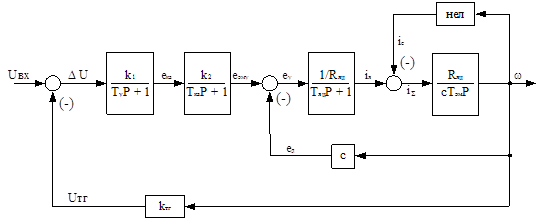
Рис. 2 – Структурная схема системы “ЭМУ – Д”
Технические данные
Данные для расчета представлены в таблице 1.
Таблица 1 – Данные для расчета
| ЭМУ | Двигатель | ТГ | ||||||||||
Еэму | К1 | Ту | К2 | Ткз | Rя эму | Uн | I | wн | Rяц | Тяц | Тэм | Ктг |
| В | - | с | - | с | Ом | В | А | рад/с | Ом | с | с | В×с |
| 230 | 1,5 | 0,05 | 1,5 | 0,17 | 5,3 | 220 | 4,25 | 157 | 2,9 | 0,02 | 0,18 | 1 |
Нелинейная зависимость момента сопротивления механизма приведена на рис. 3.

Рис. 3 - Нелинейная зависимость момента сопротивления механизма
Краткое описание этапов и особенностей процесса моделирования
На первом этапе необходимо оценить все возможные алгоритмы функционирования системы и выбрать наиболее полно отвечающий цели моделирования. Этот этап заканчивается принятием допущений и оценкой ограничений для процесса моделирования.
Второй этап подразумевает создание математических моделей системы и окружающей среды с учетом результатов и выводов первого этапа, причем, математические модели могут содержать взаимосвязанные подсистемы и элементы.
Третий этап содержит выбор способа решения уравнений математической модели. Затем разрабатывается алгоритм решения задачи и пишется программа на выбранном языке (PASCAL).
Заключительный, четвертый этап содержит отладку программы. Ввод данных, непосредственное решение задачи, вывод и анализ результатов.
Составление математической модели для системы “ЭМУ – Д”
На схеме (рис. 2) ЭМУ представлен в виде двух апериодических звеньев с коэффициентами К1 первого и К2 второго каскадов усиления и постоянными времени Ту обмотки управления и Ткз короткозамкнутой обмотки. Структурная схема двигателя состоит из безинерционного, интегрирующего и апериодического звеньев, параметры которых определяются сопротивлением якорной цепи Rяц, электромагнитной – Тяц и электромеханической – Тэм постоянными времени, а коэффициент передачи безинерционного звена С рассчитывается по номинальным данным двигателя.
Определяем величину сигнала ошибки на входе системы:
![]()
Для получения частного решения численным методом, например, Эйлера первого порядка необходимы конечно-разностные уравнения. Удобнее всего осуществить переход от передаточной функции звена к конечно-разностному уравнению.
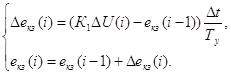
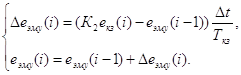
В результате перехода к конечно-разностным уравнениям получим уравнения для пошагового машинного решения численным методом Эйлера первого порядка для апериодических звеньев:
![]() ,
, 
![]() ,
, 
Находим ЭДС управления еу на втором сумматоре схемы:
![]() .
.
![]() ,
, 
Моделирование нелинейного момента сопротивления механизма из-за трудоемкости описания его дифференциальными уравнениями проведем с использованием логических зависимостей:
– при пуске:
если ![]() , то
, то ![]() ;
;
![]() , то
, то ![]()
Определим величину суммарного тока на третьем сумматоре схемы:
![]() .
.
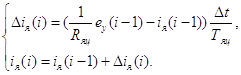
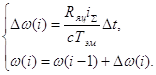
В результате перехода к конечно-разностным уравнениям получим уравнения для пошагового машинного решения численным методом Эйлера первого порядка для интегрирующего звена:
![]() ,
, 
Алгоритм расчета переходных процессов в системе “ЭМУ – Д”
Выражения, приведенные в пункте 5, являются исходными для составления алгоритма решения задачи, в котором предусмотрено конечное время расчета переходного процесса tпп с шагом интегрирования Dt.
Алгоритм, представленный на рис. 3, соответствует пуску ДПТ при нелинейном моменте сопротивления механизма.
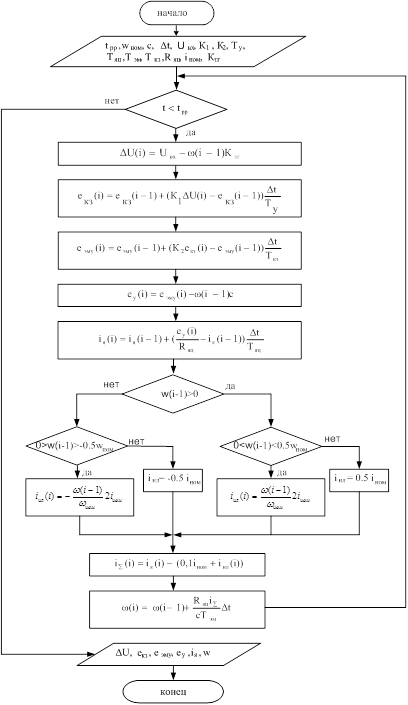
Рис. 4 – Алгоритм расчета переходных процессов в системе “ЭМУ – Д”
Листинг программ расчета и графики переходных процессов
Пуск ДПТ при линейном моменте сопротивления механизма
program map;
uses graph;
var
wnom,t,eu,Uvx,Tac,inl,ic,isum,inom,ia,w,k1,k2,ktg,du,ekz,emu,dt,
tpp,rc,Tu,Tkz,c,Tem:real;
x,y,gd,gm:integer;
begin
tpp:=12;
wnom:=157;
c:=1.322;
dt:=0.001;
Uvx:=10;
k1:=1.5;
k2:=1.5;
Tu:=0.05;
Tkz:=0.17;
rc:=5.3;
inom:=4.25;
Tac:=0.02;
Tem:=0.18;
ktg:=1;
w:=0;
gd:=vga;initgraph(gd,gm,'c:\BPascal\BGI');
setlinestyle(1,0,1);setcolor(2);
for x:=0 to 9 do
line(x*70,0,x*70,199);
for y:=0 to 9 do
line(0,y*20,639,y*20);
setcolor(5);
setlinestyle(0,0,1);setcolor(6);
line(0,120,639,120);
line(70,0,70,199);
setcolor(4); outtextxy(10,10,'w,rad/sec ');
setcolor(4); outtextxy(90,10,'Isum,A');
setcolor(4); outtextxy(580,125,'t,sec');
setcolor(7); outtextxy(120,125,'1,5 3.0 4.5 6.0 7.5 9.0');
setcolor(7); outtextxy(40,100,'4,0');
setcolor(7); outtextxy(40,80,'8,0');
setcolor(7); outtextxy(40,60,'12,0');setcolor(7); outtextxy(40,40,'16,0');
ic:=0.1*inom;
while t begin du:=Uvx-w*ktg; ekz:=ekz+(k1*du-ekz)*(dt/Tu); emu:=emu+(k2*ekz-emu)*(dt/Tkz); eu:=emu-w*c; ia:=ia+((eu/rc)-ia)*(dt/Tac); isum:=ia-ic; w:=w+((rc*isum*dt)/(c*Tem)); t:=t+dt; putpixel(round(70+t*700/tpp),round(120-w*5),1); putpixel(round(70+t*700/tpp),round(120-Isum*5),4); end; readln; closegraph; writeln('Pusk DPT pri lineinom momente soprotivleniya'); writeln(''); writeln('Chastota vrasheniya w=',w:6:2); writeln('Tok yakorya ia:=',ia:4:2); writeln('Signal oshibki dU=',ia:4:2); writeln('EDS kz Ekz=',ekz:6:2); writeln('EDS emu Emu=',emu:6:2); writeln('EDS oy Ey=',eu:4:2); writeln('isum=',isum:4:2); readln; end. Пуск ДПТ при нелинейном моменте сопротивления механизма program map; uses graph; var wnom,t,eu,Uvx,Tac,inl,ic,isum,inom,ia,w,k1,k2,ktg,du,ekz,emu,dt, tpp,rc,Tu,Tkz,c,Tem,inel:real; x,y,gd,gm:integer; begin gd:=vga;initgraph(gd,gm,'c:\BPascal\BGI'); tpp:=2; wnom:=157; c:=1.322; dt:=0.001; Uvx:=10; k1:=1.5; k2:=1.5; Tu:=0.05; Tkz:=0.17; rc:=5.3; inom:=4.25; Tac:=0.02; Tem:=0.18; ktg:=1; w:=0; setlinestyle(1,0,1);setcolor(2); for x:=0 to 9 do line(x*70,0,x*70,199); for y:=0 to 9 do line(0,y*20,639,y*20); setcolor(5); setlinestyle(0,0,1);setcolor(6); line(0,120,639,120); line(70,0,70,199); setcolor(4); outtextxy(10,10,'w,rad/sec '); setcolor(4); outtextxy(90,10,'Isum,A'); setcolor(4); outtextxy(580,125,'t,sec'); setcolor(7); outtextxy(120,125,'6,0 12.0 18.0 24.0 30.0 36.0 42.0 48.0'); ic:=0.1*inom; while t begin du:=Uvx-w*ktg; ekz:=ekz+(k1*du-ekz)*(dt/Tu); emu:=emu+(k2*ekz-emu)*(dt/Tkz); eu:=emu-w*c; if 0 isum:=ia-(ic+inel); w:=w+((rc*isum*dt)/(c*Tem)); t:=t+dt; putpixel(round(70+t*700/tpp),round(120-w*0.100),1); putpixel(round(70+t*700/tpp),round(120-isum*9),4); end; readln; closegraph; writeln('Pusk DPT pri nelineinom momente soprotivleniya'); writeln(''); writeln('Chastota vrasheniya w=',w:6:2); writeln('Tok yakorya ia:=',ia:4:2); writeln('Signal oshibki dU=',ia:4:2); writeln('EDS kz Ekz=',ekz:6:2); writeln('EDS emu Emu=',emu:6:2); writeln('EDS oy Ey=',eu:4:2); writeln('isum=',isum:4:2); readln; end. Результаты программы расчета переходных процессов в системе “ЭМУ-Д” Пуск ДПТ при линейном моменте нагрузки: W=51 с-1, ia=0,44 А, dU=32.17 B, Ekz=48.28 B, Emu=72.55 B, Ey=1.26 B, isum=0.02 A Пуск ДПТ при нелинейном моменте нагрузки: W=54.4 с-1, ia=2,20 А, dU=31.8 B, Ekz=50.78 B, Emu=81.12 B, Ey=4.86 B, isum=0.02 A