


Дистанційний екологічний моніторинг
ДЕРЖАВНИЙ АГРОЕКОЛОГІЧНИЙ УНІВЕРСИТЕТ
ЕКОЛОГІЧНИЙ ФАКУЛЬТЕТ
Кафедра моніторингу
навколишнього природного
середовища
М.В. Зосімович
ДИСТАНЦІЙНИЙ ЕКОЛОГІЧНИЙ МОНІТОРИНГ
(для студентів, які навчаються за спеціальністю ,,Екологія та охорона навколишнього середовища”)
Методичний посібник
Житомир – 2006
ББК
УДК 629.735; 656.7.07.6.015
Методичний посібник підготував:
к.т.н., доцент М.В. Зосімович.
Рецензенти:
доктор технічних наук, професор В.Ф. Манойлов (ЖДТУ);
доктор технічних наук, професор Л.В. Лось (ДАУ).
Методичний посібник розглянуто та рекомендовано до видання:
Кафедрою моніторингу навколишнього природного середовища, протокол № ____ від ____ ____ 2006 р.
Навчально-методичною комісією екологічного факультету, протокол № ____ від ____ ____ 2006 р.
ЗМІСТ
Вступ
І. ТИПИ КОСМІЧНИХ АПАРАТІВ ДЛЯ ДОСЛІДЖЕННЯ ЗЕМЛІ І ПЛАНЕТ
1.1 Науково-дослідні космічні апарати
1.2 Супутники зв’язку
1.3 Метеорологічні ШСЗ
1.4 Навігаційні ШСЗ
1.5 Геодезичні ШСЗ
1.6 Супутники для вивчення земних ресурсів
1.7 Космічні апарати для міжпланетних польотів
ІІ. АЕРОКОСМІЧНИЙ МОНІТОРИНГ ЕКОЛОГО-ГЕОЛОГІЧНОГО СЕРЕДОВИЩА
2.1 Космічна зйомка поверхні Землі
2.1.1 Основні типи зйомки
2.1.2 Космічна фотозйомка
2.1.3 Космічна сканерна зйомка
2.2 Космічні системи моніторингу
2.2.1 Багатоспектральна зйомка високого розрізнення
2.2.2 Система “Спот” та проект “Терс”
2.2.3 Формування системи моніторингу на базі сонячно-синхронних орбіт
2.2.4 Формування системи високого розрізнення для зйомки з інтервалом у декілька годин
2.3 Вплив хмарності. Єдина багатоцільова система
2.3.1 Специфіка космічної зйомки високого розрізнення
2.3.2. Ймовірна оцінка впливу хмарності
2.3.3 Результати розрахунків ймовірності зйомки
2.4 Досвід використання українсько-російського КА “Океан-О” для вирішення задач землекористування, природо охорони та раціонального використання природних ресурсів .
2.4.1. Космічний апарат “Океан-О”
2.4.2. Призначення КА “Океан-О”
2.4.3. Вимірювальна апаратура КА “Океан-О”
2.4.4. Характерні особливості роботи КА “Океан-О”
2.4.5. Інформаційні системи КА “Океан-О”
2.4.6. Схема організації наземного сегменту
2.5 Землекористування, природоохоронні та природоресурсні задачі
2.5.1 Роль космічної інформації у вирішенні задач землекористування та природоохорони
2.5.2 Дослідження урбанізованих та техногенно змінених територій з небезпечними геологічними процесами
2.5.3. Вивчення геодинамічних зон
2.5.4 Вивчення техногенних змін сучасних ландшафтів
2.5.5 Визначення фітосанітарного стану та пожежонебезпечності лісів на прикладі Зони відчуження ЧАЕС
2.5.6 Картування ділянок підвищеної природної пожежобезпечності
2.5.7 Вивчення рослинності
ІІІ. ЕКОЛОГІЯ КОСМОСУ
3.1 Ракетно-космічні комплекси
3.2 Фактори техногенного впливу космічного польоту на довкілля
3.3 Вплив ракетно-космічної техніки на озоновий шар Землі
3.4 Вплив пусків ракетоносіїв на іоносферу
3.5 Космічне сміття
3.6 Дистанційний агромоніторинг
3.6.1 Мета сучасної системи агромоніторингу
3.6.2 Недоліки існуючої системи збору інформації
3.6.3 Принципові можливості дистанційних методів агромоніторингу
3.6.4 Функціональне призначення галузевої системи комплексної обробки аерокосмічної та наземної інформації (ГІСКОАНІ)
3.6.5 Основні завдання системи дистанційного агромоніторингу
3.6.6 Призначення отриманої інформації
3.6.7 Вимоги до функціонування системи моніторингу
3.6.8 Спільні риси розроблених систем дистанційного агромоніторингу
3.6.9 Структура системи дистанційного агромоніторингу
3.6.10 Схема розташування і функціонування АКП і ТД
3.6.11 АКП і ТД на території України
3.6.12 Паспорт АКП та його структура
3.7 Вплив атмосфери на електромагнітне випромінювання
3.8 Системи дистанційного зондування Землі
3.8.1. Реєстрація ![]() - випромінювання
- випромінювання
3.8.2. Фотографічні системи
3.8.3 Відеографічні системи
3.8.4 Багатоспектральні сканери
3.8.5 Теплові сенсори
3.8.6 Надвисокочастотні локатори
3.9 Лазерні системи
3.9.1 Лідар на основі зворотного розсіювання
3.9.2 Лідар на основі реєстрації диференційного поглинання
3.9.3 Допплерівський лідар
3.9.4 Лідар на основі реєстрації флуоресценції
3.9.5 Лідар на основі реєстрації комбінаційного розсіювання
3.9.6. Застосування дистанційного зондування в екології
ІV. ПИТАННЯ ДЛЯ КОНТРОЛЮ ЗНАНЬ
4.1 Питання з розділу І
4.2 Питання з розділу
4.3 Питання з розділу ІІІ
Скорочення
Література
Зміст
ВСТУП
Успішний розвиток та поширене використання космічних методів дослідження в геології та екології дозволяють говорити про новий науковий напрямок – космоекогеологія. Космічні знімки разом з матеріалами традиційних методів вивчення Землі дають космогеології надійні дані для будови еколого-геологічних моделей територій, що досліджуються.
Довгострокова стратегія охорони та збереження природи, що розроблена за ініціативою вчених всього світу та підтримана в ООН, потребує рішучого переходу від пасивної реєстрації нищівних наслідків численних екологічних порушень та частих катастроф до їхнього своєчасного попередження і запобігання.
Прийнята міжнародна програма (на рівні Міністерства з Надзвичайних Ситуацій України) спільних дій, яка передбачає створення системи надійного та широкомасштабного моніторингу навколишнього природного середовища. Моніторинг має забезпечувати систематичне та оперативне (слідкування) спостереження за станом природного середовища з метою її контролю та управлінням правильним використанням усіма її складовими.
Оцінка стану та прогноз зміни геологічного середовища мають досить важливе значення для виявлення погрози порушення екологічної рівноваги в природі, а також велике народногосподарське значення.
Припускається, що моніторинг має здійснюватись на трьох ієрархічних рівнях:
регіональному;
детальному;
локальному.
Регіональний моніторинг повинен охоплювати цілі економічні райони та надавати загальне уявлення про характер, масштаби, інтенсивності різних геологічних процесів, збитки які вони наносять народногосподарським об’єктам та природному середовищу, ефективності захисних заходів, що використовуються тощо. В залежності від ступеню освоєння території та інших факторів він може здійснюватись в широкому діапазоні масштабів від 1:100 000 до 1:500000.
Детальний та локальний моніторинг повинен давати вже більш повне уявлення про розвиток екологічних процесів в межах окремих інженерних комплексів та споруд або їхніх комплексів. Обрання методів, що використовуються під час моніторингу, визначається його рівнем. Під час регіонального моніторингу за базові доцільно використовувати аерокосмічні методи, доповнюючи їх невеликим об’ємом наземних досліджень. Під час детального та локального моніторингу основні дані будуть одержані наземними дослідженнями, а аерокосмічні методи стануть їхнім істотним доповненням.
Провідна роль в реалізації аерокосмічного моніторингу має належати знімкам, що виконуються в оптичному діапазоні спектру через їхній максимум корисної інформації.
I. ТИПИ КОСМІЧНИХ АПАРАТІВ ДЛЯ ДОСЛІДЖЕННЯ ЗЕМЛІ І ПЛАНЕТ
1.1 Науково-дослідні космічні апарати
Науково-дослідні космічні апарата (КА) призначені для досліджень навколоземного та міжпланетного космічного простору, Місяця і планет Сонячної системи, з метою проведення різноманітних експериментів і досліджень в космічному просторі наукового та прикладного значення, а також для опрацювання конструкції окремих систем, вузлів та апаратури нових КА (наприклад, нових систем орієнтації, керування, стиковки, посадки тощо). Науково-дослідні КА за призначенням можуть бутипілотованими таавтоматичними.
До пілотованих науково-дослідних КА відносять:
а) орбітальні кораблі (ОК), орбітальні лабораторії (ОЛ), орбітальні пілотовані станції (ОПС) та орбітальні бази-станції (ОБС), що призначені для вивчення навколоземного космічного простору;
б) міжпланетні космічні кораблі (КК) і станції, що призначені для вивчення космічного простору, Місяця і планет Сонячної системи.
До автоматичних науково-дослідних КА відносять:
а) штучні супутники Землі (ШСЗ), автоматичні орбітальні лабораторії, орбітальні станції (ОС), які призначені для вивчення верхніх шарів атмосфери та навколоземного космічного простору;
б) автоматичні міжпланетні станції (АМС), штучні супутники Місяця, Сонця (ШСС) та планет, посадочні модулі і планетоходи станцій, що призначені для вивчення космічного простору та планет Сонячної системи (рис.1.1).
1.2 Супутники зв'язку
Супутники зв'язку класифікують за принципом роботи (активні, пасивні), типом орбіти, видом ліній зв'язку та їх кількості.
Активні ШСЗ використовують ретранслятори, які включають бортові приймачі та передавачі (із власними антенними системами), що працюють на різних частотах. Вони приймають сигнали наземної станції, підсилюють їх, здійснюють перетворення частоти і ретрансляцію на іншу наземну станцію. Відомі дві різновидності передачі прийнятої інформації з борту активних ШСЗ: безпосередня передача інформації без запам’ятовування та передача з затримкою інформації, що запам’ятовується на борту.
Рис. 1.1. Вигляд Землі з космосу
Пасивні ШСЗ представляють собою прості відбивачі сигналів, що випромінюють наземні станції (без підсилювання та перетворення). Відомі три види пасивних ШСЗ зв’язку:
сферичні відбивачі;
відбивачі у вигляді хмар або глобальних поясів із металевих диполів, розсіяних на певних висотах;
пласкі або лінзоподібні відбивачі.
Визначено два основні напрямки створення орбітальних супутникових систем зв’язку:
системи ШСЗ, що обертаються за еліптичними орбітами з великим ексцентриситетом;
системи ШСЗ, що обертаються за стаціонарними та синхронними орбітами.
Системи ШСЗ, що обертаються за еліптичними орбітами з великим ексцентриситетом, дозволяють забезпечити протягом тривалого часу за допомогою одного ШСЗ-ретранслятора безперервний зв’язок поміж віддаленими пунктами.
Враховуючи ймовірність виходу з ладу супутників, слід передбачити необхідність періодичного виведення на орбіту нових ШСЗ на заміну тих, що вже не функціональні. Середній час поміж запусками становить
 (1.1)
(1.1)
де ![]() - середній термін безвідмовної роботи КА (враховуються лише випадкові відмови);
- середній термін безвідмовної роботи КА (враховуються лише випадкові відмови); ![]() - кількість ШСЗ, що запускаються однією ракетою-носієм (РН);
- кількість ШСЗ, що запускаються однією ракетою-носієм (РН); ![]() - середня кількість ШСЗ, що функціонує;
- середня кількість ШСЗ, що функціонує; ![]() - ймовірність успішного запуску;
- ймовірність успішного запуску; ![]() - ймовірність успішного виведення на орбіту та увімкнення апаратури;
- ймовірність успішного виведення на орбіту та увімкнення апаратури; ![]() - термін експлуатації сонячних батарей.
- термін експлуатації сонячних батарей.
До складу системи зв’язку окрім орбітальної системи супутників (будь-якого з типів, перелічених вище) входять приймально-передаючі станції з антенними системами і телеметрична система контролю параметрів бортової апаратури. До складу системи зв’язку з орбітами, що коректуються, входить також командна радіолінія.
У системах на базі активних ШСЗ зв’язку можуть використовуватися нестабілізовані супутники (із повною ізотропною діаграмою направлення антени), стабілізовані обертанням (зазвичай мають механічний пристрій проти обертання антенного блоку), повністю стабілізовані ШСЗ із незмінною орієнтацією діаграми направлення антени (по відношенню до Землі) та сонячних батарей (відносно Сонця), наприклад ШСЗ зв’язку «Молния» (Росія).
Розрахунковий термін активного існування супутників зв’язку 5-7 років.
1.3 Метеорологічні ШСЗ
Метеорологічні ШСЗ (метеосупутники) призначені для регулярного передавання телевізійних зображень хмарового та льодового покривів Землі на наземні станції.
На ШСЗ також встановлюють датчики радіаційних випромінювань Землі та хмарового покриву, які працюють у різних діапазонах частот, а інші прилади – для аналізу метеорологічних умов. Одержана від метеосупутників інформація використовується для аналізу атмосферних процесів та прогнозів погоди.
За телевізійними та інфрачервоними (ІЧ) знімками освітленої та тіньової сторін Землі здійснюють нефаналіз хмарності (визначення її форм, структури та кількості, див. рис.1.2). Ця та інша інформація, що одержана з метеосупутників, дозволяє складати оперативні екологічні карти хмарового, льодового та снігового покривів, виявляти зародження ураганів і визначати напрямок й швидкість їх розповсюдження, розрізняти тип й етапи розвитку погодних умов, виявляти струйні потоки в атмосфері, місцеві метеорологічні явища (шквали, грозову активність тощо), досліджувати тепловий баланс Землі, визначати температуру хмарового покриву, поверхні суходолу й океану.

Рис. 1.2. Хмарність Землі з орбіти
У зв’язку із специфікою вимог до метеоспостережень для глобального прогнозування та регіонального аналізу припускаються дві системи метеорологічних спостережень з використанням супутників:
з централізованою обробкою даних (глобальне прогнозування);
з автономним використанням даних (регіональна оцінка й прогноз).
Централізована система (рис. 1.3) забезпечує одержання моментальних телевізійних зображень хмарового покриву, які послідовно охоплюють усі ділянки поверхні Землі, над якими проходять орбіти метеосупутників. Зображення запам’ятовуються в бортовому комп’ютері ШСЗ та зберігаються до моменту входження його у зону зв’язку з наземною станцією приймання даних та управління ШСЗ, після чого, за командами з Землі, починається передача усіх зображень, що одержано за один оберт ШСЗ відносно Землі.
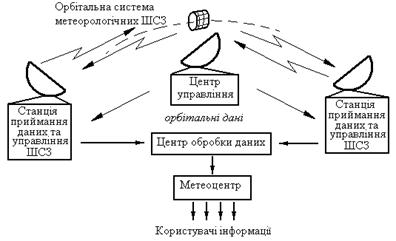
Рис.1.3. Блок-схема централізованої системи метеоспостережень з використанням ШСЗ
Автономна система на відміну від централізованої не має на борту ШСЗ бортових пристроїв запам’ятовування даних. Зображення із спеціального відікону (телевізійної передаючої трубки), який тимчасово зберігає його, передається автоматично на автономні наземні станції приймання даних (рис. 1.4). Автономна система дозволяє забезпечити метеоданими, практично без затримки, досить великі географічні райони. Для одержання від ШСЗ інформації про метеоумови у будь-якому районі необхідна приймальна станція, що устаткована апаратурою реєстрації (одержання фото- і відео- зображень) телеінформації. Для одержання зображення кожного району Землі, регулярно у полудень (на цей час райони спостереження добре освітлені) бажано використовувати так звані сонячно-синхронні орбіти, площина яких обертається (прецесія орбіти) синхронно із обертанням Землі навколо Сонця у східному напрямку. Орбітальна площина супутника має бути компланарною з напрямком Земля – Сонце. Необхідну швидкість прецесії забезпечують під час запуску обранням відповідного кута нахилення площини орбіти до екватору.
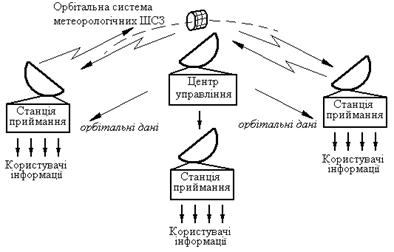
Рис.1.4. Блок-схема автономної системи метеоспостережень з використанням ШСЗ
В першому наближенні швидкість прецесії висхідного вузла орбіти (рад/с) визначається за формулою:
де ![]() - екваторіальний радіус Землі (6378,245 км);
- екваторіальний радіус Землі (6378,245 км); ![]() - кут нахилу орбіти від екватору (градус);
- кут нахилу орбіти від екватору (градус); ![]() - найвіддаленіша точка орбіти від центру Землі (км);
- найвіддаленіша точка орбіти від центру Землі (км); ![]() - найближча точка орбіти від центру Землі (км).
- найближча точка орбіти від центру Землі (км).
Отже, для сонячно-синхронної орбіти кут нахилу (рад) буде становити:
![]()
Так як прецесія в східному напрямку має додатний знак (+), то кут ![]()
З метою спрощення обробки одержаних зображень та зберігання незмінних характеристик розрізнювальної здатності зображень на знімках доцільні кругові та наближені до них орбіти. Для фіксування швидкоплинних атмосферних явищ (вихорових шквалів, грозових областей тощо, див. рис. 1.5), особливо частих в низьких широтах, найпридатніші кругові орбіти.
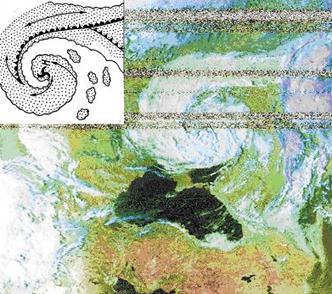
Рис. 1.5. Циклон над територією України
Найдоцільнішими вважають системи, що складаються з чотирьох та шести метеосупутників, що обертаються на полярних кругових орбітах висотою 600 – 2000 км від усередненої земної поверхні, розташовані так, щоб супутники одночасно знаходилися риблизно на одній широті (орбіти рознесені по довготі).
Зону ефективного зв’язку можна оцінювати величиною дуги ![]() геоцентричного кола (рис. 1.6-1.7). Якщо проекція траєкторії
геоцентричного кола (рис. 1.6-1.7). Якщо проекція траєкторії
ШСЗ на Землю проходить на відстані від станції, не меншій за ![]() при будь-якій орієнтації орбіти відносно точки стояння станції на даному оберті буде можлива передача від супутника протягом часу, не меншим за встановлену тривалість сеансу
при будь-якій орієнтації орбіти відносно точки стояння станції на даному оберті буде можлива передача від супутника протягом часу, не меншим за встановлену тривалість сеансу ![]() , і при цьому кут підняття антени не буде меншим за допустимий
, і при цьому кут підняття антени не буде меншим за допустимий ![]() Як видно з рис. 1.6, відстань проекції траєкторії на Землю визначається як:
Як видно з рис. 1.6, відстань проекції траєкторії на Землю визначається як:
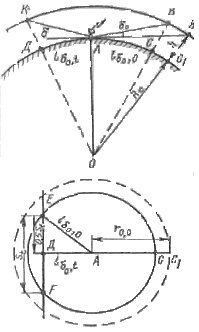
Рис.1.6. Схема визначення зони ефективного зв’язку наземного пункту з ШСЗ
![]()
![]()
де ![]() - дугова курсова відстань (дуга геоцентричного кола), що відповідає находженню ШСЗ в зоні видимості станції протягом часу
- дугова курсова відстань (дуга геоцентричного кола), що відповідає находженню ШСЗ в зоні видимості станції протягом часу ![]() (
(![]() де
де ![]() - період обертання ШСЗ);
- період обертання ШСЗ); ![]() - радіус Землі;
- радіус Землі; ![]() - висота орбіти.
- висота орбіти.
Якщо ![]() зв’язок станції з ШСЗ буде можливий на кожному витку. Якщо величина
зв’язок станції з ШСЗ буде можливий на кожному витку. Якщо величина ![]() не задовольняє цій умові, то частота проходження ШСЗ повз зону ефективного зв’язку (при
не задовольняє цій умові, то частота проходження ШСЗ повз зону ефективного зв’язку (при ![]() )
)
![]()
При ![]() та
та ![]() Значення параметрів будуть:
Значення параметрів будуть:
![]()
![]()
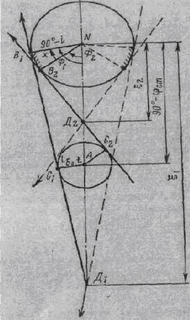
Рис. 1.7. Схема для визначення частоти сеансів зв’язку наземного пункту з ШСЗ: ![]()
![]() - проекції траєкторій ШСЗ на земну поверхню;
- проекції траєкторій ШСЗ на земну поверхню; ![]() - точка стояння станції;
- точка стояння станції; ![]() - північний полюс (
- північний полюс (![]()
![]()
![]()
![]() )
)
Система метеорологічних ШСЗ може виконувати також завдання по збору і передачі до єдиного центру метеорологічних даних від окремих морських та повітряних метеостанцій.
Російські супутники космічної метеорологічної системи ”Метеор’’ забезпечують одержання комплексної метеоінформації: телевізійної, інфрачервоної, актинометричної з освітленого та тіньового боків Землі (табл. 1.1).
Метеорологічні супутники SMS (США) призначені для зйомки хмарового покриву в денний та нічний часи із стаціонарної орбіти (![]() сх.д.), а також для ретрансляції метеорологічної інформації. Вони передають космічні знімки хмарового покриву кожні 30 хвилин.
сх.д.), а також для ретрансляції метеорологічної інформації. Вони передають космічні знімки хмарового покриву кожні 30 хвилин.
Таблиця 1.1
Основні дані російських метеорологічних ШСЗ системи ,,Метеор”
| Тип орбіти | Кругова навколополярна |
| Висота орбіти, км | 625 - 630 |
| Склад метеорологічного устаткування | Телевізійна (ТВ) (дві камери). Інфрачервона (ІЧ) телевізійного типу (в діапазоні хвиль 8-12 мкм). Актинометрична (АК) – радіометри (по 2 скануючі вузькосеторні та нескануючі широко секторні прилади) |
Ширина смуги захоплення (на місцевості), км: ТВ апаратурою ІЧ апаратурою АК апаратурою | 1000 1000 2500 |
Просторове розрізнення (у надірі), км: ТВ зображень ІЧ зображень АК зображень | 1,25 Х 1,25 15 Х 15 50 Х 50 |
Чуттєвість до температурних перепадів ІЧ апаратури, | 2-3 при додатних і 7-8 при від’ємних температурах |
| Джерело живлення | Сонячні та хімічні батареї |
1.4 Навігаційні ШСЗ
Орбітальна система з навігаційних ШСЗ, що розроблена у США, в сукупності з наземною системою забезпечення та бортовою апаратурою об’єктів, що визначаються у наш час використовується для встановлення місця об’єкта в заданій системі координат у будь-який час доби, за будь-яких метеоумов та необмеженій пропускній здатності. За опорну радіонавігаційну величину (орієнтир з відомими координатами на даний момент часу) використовується задана у часі й просторі з певною точністю траєкторія руху супутника. Траєкторія ШСЗ в часі задається ефемеридами, що періодично обновлюються у системі єдиного часу. Значення ефемерид вводяться разом із сигналами точного часу від бортового датчика. Траєкторії руху ШСЗ також можна обирати із спеціальних каталогів, подібних до астрономічних для ефемерид.
В залежності від методів вимірювання параметрів, що характеризують відносне положення ШСЗ та об’єкта, що визначається, розрізняють декілька способів визначення місцеположення об’єкта:
дальномірний;
кутомірний;
дальномірно-кутомірний;
доплеровський.
Перші три способи через малу точність вимірювань практично не використовуються.
В допплерівських системах для визначення величини зміщення![]() точки стояння об'єкта відносно сліду траєкторії супутника на земній поверхні - курсового параметра ШСЗ (рис. 1.8) - використовуються вимірювання допплерівського зсуву частоти
точки стояння об'єкта відносно сліду траєкторії супутника на земній поверхні - курсового параметра ШСЗ (рис. 1.8) - використовуються вимірювання допплерівського зсуву частоти ![]() сигналів, що випромінюються бортовим передавачем:
сигналів, що випромінюються бортовим передавачем:
![]()
де ![]() - радіальна складова швидкості ШСЗ;
- радіальна складова швидкості ШСЗ; ![]() - швидкість світла.
- швидкість світла.
Для визначення координат точки стояння об'єкта достатньо визначити величину курсового параметра ![]() супутника, текучі координати і параметри руху якого відомі на момент проходження точки
супутника, текучі координати і параметри руху якого відомі на момент проходження точки ![]() .
.
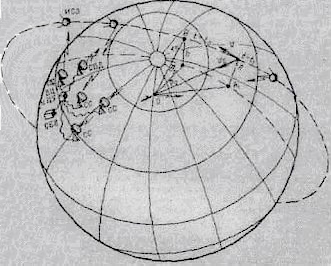
Рис.1.8. Схема побудови навігаційної системи з використанням ШСЗ: О – об’єкт, що визначається; СС – станція супроводження ШСЗ; СВД – станція введення даних; СЕВ – станція еталонної частоти та єдиного часу; ВЦ та ЦУ – обчислювальний центр та центр управління; ![]() - курсовий параметр ШСЗ;
- курсовий параметр ШСЗ; ![]() - радіальна складова ШСЗ
- радіальна складова ШСЗ
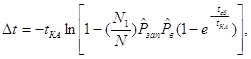
Якщо прийняти, що ділянка АВ траєкторії ШСЗ прямолінійна і лінійна швидкість супутника ![]() на цій ділянці стала, то в кожний момент часу
на цій ділянці стала, то в кожний момент часу ![]()
де ![]() - момент часу проходження ШСЗ курсового параметра (
- момент часу проходження ШСЗ курсового параметра (![]() ).
).
Для точності навігації необхідно враховувати також рефракцію радіохвиль в іоносфері. У зв'язку з цим допплерівський зсув вимірюється не менше ніж на двох частотах. За характеристиками розповсюдження радіохвиль на двох сполучених частотах визначається поправка на рефракцію.
Допплерівська система, яка є пасивною, забезпечує необмежену пропускну здатність.
Характеристики орбітальної системи навігаційних ШСЗ зумовлюються необхідною максимальною частотою визначення місця положення об'єкту, заданим часом активного існування ШСЗ, можливостями встановлення зв'язку між об'єктом, що визначається та ШСЗ (характеристиками радіотехнічної апаратури, енергетичними ресурсами на борту ).
Для навігаційних ШСЗ найбільш бажані полярні кругові орбіти, через те, що вони охоплюють усю поверхню Землі, розрізняються більшою стабільністю, для них простіше ніж для еліптичних розраховувати ефемериди та враховувати вплив збурюючих дій. Висота орбіти зазвичай близько 1000 км. Для, визначення об'єктом у довільній точці Землі свого місцеположення) в орбітальній системі координат не рідше ніж через кожні 100-120 хвилин мають бути не менше чотирьох супутників, які обертаються по круговим полярним орбітам. Площини орбіт (висхідні вузли) в просторі мають бути рознесені на 45°. При цьому вважається, що з кожним супутником об'єкт, що визначається, може підтримувати зв'язок на двох-трьох сусідніх витках (у межах видимості).
1.5 Геодезичні ШСЗ
Геодезичні ШСЗ призначені для вирішення геометричних та динамічних (фізичних) задач геодезії.
Геометричні задачі зводяться до визначення положення точок на земній поверхні та встановлення точних геодезичних зв’язків поміж континентами та відособленими об'єктами (наприклад, островами) з метою приведення їх до єдиної системи координат, прив'язки з високою точністю окремих пунктів до мережі тріангуляції (створення глобальної геодезичної мережі та її ущільнення), визначення точних координат окремих пунктів на земній поверхні, забезпечення картографування.
Динамічні задачі приводяться до уточнення форми, розмірів і гравітаційного поля Землі, встановлення її справжньої форми, визначення потенціалів гравітаційного поля та гравітаційних аномалій, а також встановлення законів їхніх змін. Так, за допомогою обробки орбітальних вимірювань у наш час визначено коефіцієнта при членах розкладення у ряд гравітаційного потенціалу Землі до 14 – го порядка.
Спеціальні геодезичні ШСЗ використовуються як опорні точки, тобто точки з точно відомими на даний момент координатами. У залежності від методу задавання координат текучого місця положення ШСЗ розрізняють два способи розв’язання геометричних задач. При першому способі використовуються дані точного прогнозування орбіт ШСЗ (як це робиться під час навігаційних визначень з використанням ШСЗ); при другому способі координати текучого місця положення ШСЗ визначаються вимірюваннями з декількох наземних пунктів (кутомірних або дальномірних), координати яких відомі. Перший спосіб дозволяє провести геодезичну прив’язку будь-яких пунктів, устаткованих необхідним обладнанням. Однак досягнуті в наш час точності прогнозування орбіт (декілька десятків метрів) усе ще не придатні для геодезії. На практиці використовується другий спосіб, який може використовуватися для взаємної прив’язки пунктів, відносно яких супутник протягом визначеного часу знаходиться одночасно в зоні видимості. Цей спосіб можна реалізувати на базі використання оптичних кутомірних та радіотехнічних (дальномірних, допплерівських і кутомірно-дальномірних) систем для вимірювання місцеположення ШСЗ з наземних пунктів.
Для оптичних кутомірних вимірювань місця положення ШСЗ супутники устатковуються бортовими імпульсними джерелами світла (оптичними маяками) або використовуються для відбиття сигналів оптичних квантових генераторів наземних станцій. З метою забезпечення високої точності кутомірних вимірювань (±1-2") на наземних пунктах використовуються спеціальні високоточні фототеодолітні установки з наступною обробкою компаратором отриманих фотографічних зображень ШСЗ на фоні зірок. Висока точність забезпечується також фіксацією часу вимірювань, який
задається бортовим еталоном. Сигнали єдиного часу передаються по радіолініям орбітальних вимірювань.
В радіотехнічних далекомірних системах використовуються радіолокаційні вимірювання дальності з декількох сполучених пунктів, для чого на борту геодезичного ШСЗ встановлюється до чотирьох приймачів та передавачів (згідно кількості сполучених пунктів), які працюють на різних частотах. Як і при кутомірних методах, моменти вимірювань фіксуються в часі за сигналами бортового еталону часу.
Орбіти геодезичних ШСЗ мають бути наближеними до кругових на висоті 1000-1400 км (ШСЗ з оптичним маяком) або кругові на висоті близько 1000 км (ШСЗ з радіотехнічною апаратурою для далекомірних вимірювань).
1.6 Супутники для вивчення земних ресурсів
Основні області використання КА для розвідки земних ресурсів - це збір різноманітних океанографічних даних, моніторинг сільськогосподарських культур та лісових масивів, геологічна розвідка, вимірювання товщини снігового покриву та спостереження за пересуванням льодовиків, оцінка земельних ділянок в інтересах землекористування, оцінка якості води, теплове і топографічне картування місцевості, збір даних для прогнозування стихійного лиха (наприклад, землетрусів, повеней, лісових пожеж, див. табл. 1.2-1.3, рис. 1.9-1.11).
Таблиця 1.2
Основні технічні характеристики КА "Фрам"
Розрізнення на місцевості з висоти 200км, ум. од.: на чорно-білій плівці на спектрозональній плівці | 20...ЗО ЗО...50 |
| Ширина смуги фотографування з висоти 200 км, км | 180 |
Площа фотографування з висоти 200км, км2 | 17 млн |
Робочі орбіти: мінімальна висота, км максимальна висота, км | 210...229 255...275 |
| Діапазон широт моніторингу | 82 півд.ш. ...82зах.ш. |
| Запас характеристичної швидкості, м/с | 42 |
| Час існування, діб | до 13 |
| Маса КА, кг | до 6100 |
| Тип ракети-носія | "Союз" |
В основу використання КА для вивчення земних ресурсів покладена наступна фізична властивість: будь-яка речовина поглинає, випромінює, розсіює або відбиває (повністю або частково) електромагнітну енергію і характеризується властивою їй сигнатурою, яка пов'язана з довжиною хвилі та молекулярною будовою речовини. Дякуючи цьому можливе дистанційне вимірювання за допомогою широкого класу приладів, які можуть визначити (відшукати та зареєструвати) сигнатуру речовини без безпосереднього контакту з ним.
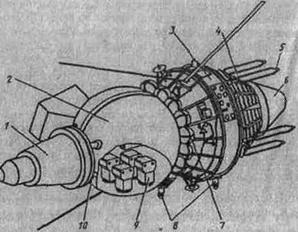
Рис.1.9. Загальний вигляд КА "Фрам" (Росія): 1 - комплексна рушійна установка; 2 - спускний апарат; 3 – відсік приладів; 4 - жалюзі системи терморегулювання; 5 - антени командно-програмно-траєкторної радіолінії; 6 - порохова гальмівна рушійна установка; 7 - кульовий балон з азотом системи виконавчих органів; 8 - чуттєві елементи системи керування рухом; 9 - фотокомплекс для багатозональної зйомки земної поверхні; 10 - уніфікована система відділення
Найбільш ефективними для польотів КА з метою вивчення земних ресурсів вважаються сонячно-синхронні кругові орбіти на висотах 500-900 км.
До складу наземного комплексу входять: станція супроводження, пункти збору інформації (яка передається безпосередньо або ретранслюється через супутники зв'язку), центр управління та центр обробки інформації. Обробка даних включає декодування, нормалізацію, трансформування, прив'язку до місцевості, вилучення інформації, індексацію, архівацію та збереження.
Таблиця 13
Основні технічні характеристики КА "Ресурс-Ф2"
Розрізнення на місцевості з висоти 200км, ум. од.: на чорно-білій плівці на спектрозональній плівці | 9...12 15...18 |
| Ширина смуги фотографування з висоти 250 км, км | 150 |
Площа фотографування з висоти 250 км, км2 | 20,7 млн |
Фотометрична точність знімків, %: абсолютна | 15 |
| відносна між каналами | 5 |
| Число спектральних діапазонів | 4 Х 6 |
Робочі орбіти: висота кругової орбіти | 210...450 |
Висота еліптичної орбіти, км: мінімальна | 170...250 |
| максимальна | 250...400 |
| Діапазон широт моніторингу | 82півд.ш....82зах.ш. |
| Нахил площини орбіти, град | 62,8... 82,6 |
| Час існування, діб | до 30 |
| Маса КА, кг | до 6450 |
| Тип ракети-носія | "Союз" |
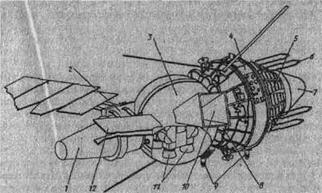
Рис. 1.10. Загальний вигляд КА "Ресурс-Ф2" (Росія): 1 - комплексна рушійна установка; 2 - підвісний відсік; З – спускний апарат: 4 - приладний відсік; 5 - жалюзі системи терморегулювання; 6 - антени командно-програмно-траєкторної радіолінії; 7 - порохова гальмівна рушійна установка; 8 - кульовий балон з азотом системи виконавчих органів; 9 - чуттєві елементи системи керування рухом; 10 - бленда зоряного апарата; 11 -чотирьох канальна апаратура для багатозональної зйомки земної поверхні; 12 - сонячна батарея
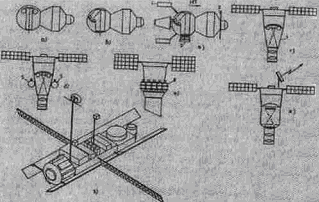
Рис.1.11. Схема еволюції КА моніторингу для дослідження природних ресурсів Землі: а - КА з фотоапаратурою без зламу оптичної осі; б - КА, які устатковані довго фокусною апаратурою із зламом оптичної осі; в - низькоорбітальний КА моніторингу з аеродинамічними компенсаторами 1 та теплозахисним екраном 2, тепловою блендою 3; г - КА, у якого корпус СА 4 виготовлений як корпус фотоапарата; д - КА з капсулами 5 для оперативної доставки фотоплівки на Землю; є - КА з капсульним автоматом 6; ж - оптико-електронний КА моніторингу; з - комплексний КА моніторингу
1.7 Космічні апарати для міжпланетних польотів
Конструкція міжпланетних КА відрізняється рядом особливостей, які пов'язані з тривалою дією факторів космічного простору. Це враховується підбором спеціальних матеріалів, герметизацією окремих вузлів, використанням спеціальних покривів, максимально стійких по відношенню до метеорної ерозії, спеціального антимеоритного захисту (на КК).
Орбітальні та міжпланетні станції складаються з наступних основних частин: відсіку приладів, блоку баків рушійної установки (РУ), коректую чого двигуна з вузлами автоматики, сонячні батареї, антенно-фідерного обладнання, радіаторів системи терморегулювання.
Для автоматичних міжпланетних станцій (АМС) серій "Зонд", "Марс", "Венера" (рис.1.12-1.13) характерні наступні режими роботи: тривала орієнтація робочих поверхонь сонячних батарей на Сонце, точна орієнтація відносно небесних орієнтирів перед корекцією траєкторії, орієнтація параболічної антени на Землю для встановлення інформативного зв'язку, стабілізація під час роботи коректуючої РУ.
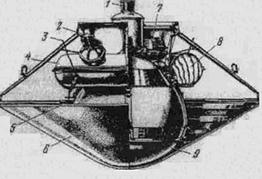
Рис.1.12. СА "Марс-6" (праворуч - розріз): 1 - двигун відведення СА; 2 - двигун введення в дію витяжного парашута; 3 - антени зв'язку з станцією на орбіті; 4 - парашутний контейнер; 5 - антена радіовисотоміра; 6 - аеродинамічний гальмівний конус; 7 - прилади та апаратура системи автоматичного управління; 8 - основний парашут; 9 - автоматична марсіанська станція
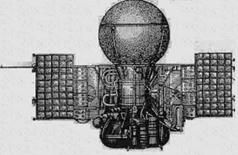
Рис.1.13. Загальний вигляд АМС "Венера-9" ("Венера-10") до відокремлення шароподібного СА від орбітального апарату

Рис.1.14.Спускний апарат станції “Венера-9” (“Венера-10”): 1 - спіральна антена; 2 - аеродинамічний гальмівний пристрій; 3 - корпус з контейнером приладів; 4 - еластичний посадочний пристрій; 5 - прожектори (не знадобились)

Рис.1.15. Ракета “Місяць-Земля” (“Луна-16”)
Підчас проектування системи управління для міжпланетних КА необхідно враховувати деякі особливості мі