


Технология цифровой связи
1 Лекция №1. Элементы систем цифровой связи
1.1 Функциональная схема и основные элементы цифровой системы
2 Лекция №2. Каналы связи и их характеристики
2.1 Понятие каналов связи
2.2 Проводные каналы
2.3 Волоконно-оптические каналы
2.4 Беспроводные (радио) каналы
3 Лекция №3. Математические модели каналов связи
3.1 Математические модели каналов связи
4 Лекция №4. Узкополосная передача
4.1 Демодуляция и обнаружения
4.2 Обнаружение сигнала в гауссовом шуме
4.3 Согласованный фильтр
4.4. Межсимвольная интерференция
5 Лекция №5. Алгоритмы цифрового кодирования
5.1 Алгоритмы цифрового кодирования
5.2 Биполярный метод
5.3 Псевдотроичный метод
5.4 Парно – селективный троичный код
6 Лекция №6. Полосовая модуляция и демодуляция
6.1 Методы цифровой полосовой модуляции
6.2 Многопозиционная модуляция
6.3 Амплитудная манипуляция
7 Лекция №7 Оптимальный прием ДС сигнала
7.1 Оптимальный прием ДС сигнала
8 Лекция №8 Спектральные характеристики модулированных колебаний
8.1 Спектральные характеристики модулированных колебаний
8.2 Оптимальный приемник
8.3 Когерентный и некогерентный прием
8.4 Цифровой согласованный фильтр
8.5 Оценка помехоустойчивости модулированных сигналов
9 Лекция №9. Методы синхронизации в ЦСС
9.1 Синхронизация в синхронных и асинхронных системах
9.2 Синхронизация поэлементная, групповая и цикловая
10 Лекция №10 Методы и устройства помехоустойчивого кодирования
10.1 Основные принципы обнаружения и исправления ошибок
10.2 Кодовые расстояние и корректирующая способность кода
10.3 Классификация корректирующих кодов
11 Лекция №11.Помехоустойчивые коды и методы декодирования корректирующих кодов
11.1 Коды Рида – Соломона
12 Лекция №12. Системы связи с обратной связью
12.1 Характеристики систем с обратной связью и их особенности
12.2 Структурная схема системы с информационной обратной связью (ИОС) и решающей обратной связью (РОС), характеристики и алгоритмы работы
13 Лекция №13. Сжатие данных в ЦСС
13.1 Алгоритмы сжатия без потерь
Заключение
Список литературы
Введение
В этих конспектах лекции мы представляем основные принципы, которые лежат в основе анализа и синтеза систем цифровой связи. Предмет цифровой связи включает в себя передачу информации в цифровой форме от источника, который создаёт информацию для одного или многих мест назначения. Особенно важным для анализа и синтеза систем связи являются характеристики физических каналов, через которые передаётся информация. Характеристики канала обычно влияют на синтез базовых составных блоков системы связи. Ниже мы опишем элементы системы связи и их функции.
Развитие телекоммуникационных сетей увеличивает роль и значение передачи дискретных сообщений в электросвязи.
Целью дисциплины является изложение принципов и методов передачи цифровых сигналов, научных основ и современное состояние технологии цифровой связи; дать представление о возможностях и естественных границах реализации цифровых систем передачи и обработки, уяснить закономерности, определяющие свойства устройств передачи данных и задачиих функционирования.
Следует отметить, что самая ранняя форма электрической связи, а именно телеграфная связь, была системой цифровой связи. Электрический телеграф был разработан Сэмюэлём Морзе и демонстрировался в 1837 г. Морзе изобрел двоичный код переменой длины, в котором буквы английского алфавита представлены последовательностью точек и тире (кодовые слова). В этом коде часто встречающиеся буквы представлены короткими кодовыми словами, в то время как буквы, встречающиеся менее часто, — более короткими кодовыми словами. Таким образом, код Морзе был предшественником методов кодирования источников кодом переменной длины.
Почти 40 годами позже, в 1875г., Эмиль Бодо изобрёл код для телеграфной связи, в котором каждая буква кодировалась двоичным кодом фиксированной длины 5. В коде Бодо элементы двоичного кода имеют равную длину и именуются посылкой и паузой.
Хотя Морзе принадлежит первая электрическая система цифровой связи (телеграфная связь), начало того, что мы теперь считаем современной теорией цифровой связи, следует из работ Найквиста (1924), исследовавшего проблему определения максимальной скорости передачи, которую можно обеспечить по телеграфному каналу данной ширины полосы частот без межсимвольной интерференции (МСИ). Он сформулировал модель телеграфной системы, в которой передаваемый сигнал имеет общую форму
![]() (1.1)
(1.1)
где g(t) - базовая форма импульса (несущей); {аn} - последовательность данных в двоичном коде (±1), передаваемых со скоростью 1/Гбит/с.
Найквист пытался определить оптимальную форму импульса g(t) с ограниченной полосой W Гц и максимизировать скорость передачи данных в предположении, что импульс не вызывает МСИ в точках отсчёта kT, k = 0,± 1,±2,... Эти исследования привели его к заключению, что максимальная скорость передачи равна 2W отсч./с. Эту скорость теперь называют скоростью Найквиста. Более того, эту скорость передачи можно достичь при использовании импульса g(t) = sin2πWt/(2πWt). Эта форма импульса допускает восстановление данных без межсимвольных помех в выборочные моменты времени. Результат Найквиста эквивалентен версии теоремы отсчётов для сигналов с Ограниченной полосой, который был позже точно сформулирован Шенноном (1948). Теорема отсчётов гласит, что сигнал с шириной полосы частот W может быть восстановлен по его отсчётам, взятым со скоростью Найквиста 2W, путем использования интерполяционной формулы
![]() (1.2)
(1.2)
В продолжение работы Найквиста Хартли (1928) рассмотрел вопрос о количестве данных, которые могут быть переданы надежно по каналу с ограниченной полосой частот, когда для последовательной передачи данных используются импульсы со многими амплитудными уровнями. С учетом шума и другой интерференции Хартли показал, что приемник может надежно оценивать амплитуду принятого сигнала с некоторой точностью ![]() . Это исследование привело Хартли к заключению, что имеется максимальная скорость передачи данных по каналу с ограниченной полосой частот, зависящая от максимальной амплитуды сигнала Аmах (фиксированной максимальной мощности) и величины
. Это исследование привело Хартли к заключению, что имеется максимальная скорость передачи данных по каналу с ограниченной полосой частот, зависящая от максимальной амплитуды сигнала Аmах (фиксированной максимальной мощности) и величины ![]() .
.
Другим значительным вкладом в развитие теории связи была работа Винера (1942), который рассмотрел проблему оценивания полезного сигнала s(f) на фоне аддитивного шума n(f), исходя из наблюдения принимаемого сигнала r(t) = s(t) + n(t) . Эта проблема возникает при демодуляции сигналов. Винер определил линейный фильтр, выход которого является лучшей среднеквадратической аппроксимацией полезного сигнала s(f). Полученный фильтр назван оптимальным линейным (винеровским) фильтром.
Результаты Хартли и Найквиста по максимальной скорости передачи цифровой информации были предшественниками работ Шеннона (1948), который установил математические основы передачи информации по каналам связи и нашел фундаментальные ограничения для систем цифровой связи. В своей пионерской работе Шеннон сформулировал основную проблему надежной передачи информации в терминах статистической теории связи, используя вероятностные модели для информационных источников и каналов связи. Применяя вероятностный подход, он нашёл универсальную логарифмическую меру для количества информации источника. Он также показал, что существует некоторый предельный показатель, характеризующий скорость передачи информации по каналу связи, зависящий от величины мощности передатчика, ширины полосы и интенсивности аддитивного шума, названный им пропускной способностью канала. Например, в случае аддитивного белого (с равномерным спектром) гауссовского шума идеальный частотно-ограниченный канал с шириной полосы W имеет пропускную способность С', бит/с, которая определяется формулой
![]()
где Р - средняя мощность сигнала, a nq - спектральная плотность мощности аддитивного шума. Значение параметра пропускной способности канала С' состоит в том, что если информационная скорость (производительность) источника R меньше, чем C'(R < С') , то теоретически возможно обеспечить надёжную (свободную от ошибок) передачу через канал соответствующим кодированием. С другой стороны, если R > С' , то надежная передача невозможна, независимо от способов обработки сигнала на передаче и приеме. Таким образом, Шеннон установил основные ограничения передачи информации и породил новое направление, которое теперь называется теорией информации.
Другой важный вклад в области цифровой связи - это работа Котельникова (1947), который провел тщательный анализ различных систем цифровой связи, основанный на геометрическом представлении.
Исследование Котельникова было позже развито Возенкрафтом и Джекобсом (1965).
Вслед публикациям Шеннона появилась классическая работа Хемминга (1950) по кодам с обнаружением и с исправлением ошибок, которые противодействуют вредному влиянию канального шума. Работа Хемминга стимулировала многих исследователей, которые в последующие годы открыли ряд новых и мощных кодов, многие из которых сегодня внедрены в современные системы связи.
За ранними работами Шеннона, Котельникова и Хемминга появилось много новых достижений в области цифровой связи. Некоторые из наиболее заметных достижений следующие:
разработка новых блоковых кодов Маллером (1954), Ридом (1954) и Соломоном (1960), Боузом и Рой-Чоудхури (1960) и Гоппом (1970)
Данные о дисциплине: Название «Технологии цифровой связи».
По данной дисциплине проводятся лекционные и практические занятия, проводятся лабораторные работы, кроме того, предполагается выполнение курсовая работа, собирается схема с применением пакета «System View» для моделирования телекоммуникационных систем, кодирующего и декодирующего устройства циклического кода с использованием модуляции и демодуляции и проведение самостоятельных работ с целью углубления общих знаний теории.
Кредиты | Курс | Семестр | Лекции | Практическиезанятия | Лаборат.работы | Курсовой проект | Экзамен |
3 | 3 | 6 | 1.5 (26час.) | 1 (17 час.) | 0.5 (17 час.) | 6 | 6 |
1Лекция №1. Элементы систем цифровой связи
Цель лекции: изучение основных элементов систем цифровой связи и классификации сигналов.
Содержание:
а) функциональная схема и основные элементы цифровой системы;
б) цифровые сигналы.
1.1 Функциональная схема и основные элементы цифровой системы
Функциональную схему и основные элементы цифровой системы связи поясняет рисунке 1.1. Выход источника может быть либо аналоговым сигналом, как звуковой или видеосигнал, либо цифровым сигналом, как выход печатающей машины, - он дискретен во времени и имеет конечное число выходных значений. В системе цифровой связи сообщения, выданные источником, преобразуются в последовательность двоичных символов. В идеале мы можем представить выход источника сообщения небольшим числом двоичных символов (насколько это возможно). Другими словами, мы ищем эффективное представление выхода источника, которое приводит к источнику с наименьшей избыточностью или с полным её отсутствием. Процесс эффективного преобразования выхода источника - как аналогового, так и цифрового - в последовательность двоичных символов называют кодированием источника или сжатием данных.
Последовательность двоичных символов от кодера источника, который мы назовём источником информации, поступает на кодер канала. Цель кодера канала состоит в том, чтобы ввести управляемым способом некоторую избыточность в информационную двоичную последовательность, которая может использоваться в приёмнике, чтобы преодолеть влияние шума и интерференции, с которой сталкиваются, при передачи сигнала через канал. Таким образом, добавленная избыточность служит для увеличения надёжности принятых данных и улучшает верность воспроизведения принятого сигнала. Фактически избыточность в информационной последовательности помогает приёмнику в декодировании переданной информационной последовательности. Например, тривиальной формой кодирования исходной двоичной последовательности является простое повторение каждого двоичного символа т раз, где т - некоторое целое положительное число. Более сложное (нетривиальное) кодирование сводится к преобразованию блока из k информационных символ в уникальную последовательность из n символов, называемую кодовым словом. Значение избыточности, вводимой при кодировании данных таким способом, измеряется отношением n/k. Обратная величина этого отношения, а именно: k/n, названа скоростью кода.
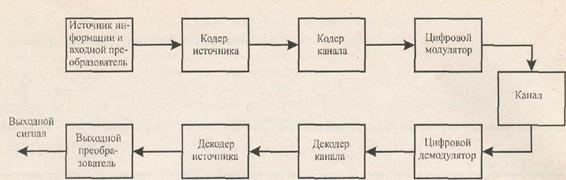
Рисунок 1.1 - Основные элементы цифровой системы связи
Двоичная последовательность на выходе кодера канала поступает на цифровой модулятор, который служит интерфейсом к каналу связи. Так как почти все каналы связи, с которыми сталкиваются на практике, способны к передаче электрических сигналов (волновых процессов), основная цель цифрового модулятора сводится к отображению информационной двоичной последовательности в соответствующий сигнал. Чтобы разобраться с этим вопросом, предположим, что кодированная информационная последовательность должна передать один бит за определённое время с постоянной скоростью R бит/с. Цифровой модулятор может просто отображать двоичный символ 0 в сигнал s0(t), а двоичный символ 1 - в сигнал s1(t). Таким способом каждый бит кодера передаётся отдельно. Мы называем это двоичной модуляцией. В качестве альтернативы модулятор может передавать b кодированных информационных битов одновременно, используя различные сигналы si(t), i=0, ..., M-l, один сигнал для каждого из М-1 возможных b-битовых последовательностей. Мы назовём это М- позиционной модуляцией (М>2). Заметим, что информационная последовательность с b битами поступает на вход модулятора каждые b/R секунд. Следовательно, когда канальная скорость передачи данных R фиксирована, для передачи одного из М сигналов, соответствующих информационной последователь-ности из b бит, отведён в b раз больший интервал времени, чем при двоичной модуляции.
Канал связи - это физическая среда, которая используется для передачи сигнала от передатчика к приёмнику. При беспроволочной связи каналом может быть атмосфера (свободное пространство). С другой стороны, телефонные каналы обычно используют ряд физических сред, включая линии проводной связи, волоконно-оптические кабели и беспроволочные линии (например, микроволновую радиолинию). Для любой физической среды, используемой для передачи информации, существенно, что передаваемый сигнал подвержен случайным искажениям через такие механизмы, как воздействие аддитивного теплового шума, генерируемого электронными устройствами, воздействие промышленных помех (например, автомобильные помехи от системы зажигания), воздействие атмосферных помех (электрические разряды молнии во время грозы) и т.п.
На приёмной стороне системы цифровой связи цифровой демодулятор обрабатывает искажённый каналом передаваемый сигнал и преобразует его в последовательность чисел, которые представляют оценки переданных данных (двоичных или М - позиционных). Эта последовательность чисел поступает на канальный декодер, который пытается восстановить первоначальную информационную последовательность, используя знание канального кода и избыточности, содержащейся в принятых данных.
Мера качества работы демодулятора и декодера - это частота, с которой возникают ошибки декодируемой последовательности. Более точно, средняя вероятность ошибки на бит для выходных символов декодера является удобной характеристикой качества демодулятора-декодера. Вообще говоря, вероятность ошибки является функцией от характеристик кода, форм сигналов, используемых для передачи информации по каналу, мощности передатчика, характеристик канала, а именно уровня шума, природы интерференции и т.д., и методов демодуляции и декодирования. Эти обстоятельства и их влияние на характеристики качества системы связи будут обсуждаться подробно в последующих главах.
На заключительной стадии, когда рассматривается аналоговый выход, декодер источника принимает выходную последовательность от декодера канала и, используя знание метода кодирования источника, применённого на передаче, пытается восстановить исходную форму сигнала источника. Ошибки декодирования и возможные искажения в кодере и декодере источника приводят к тому, что сигнал на выходе декодера источника является аппроксимацией исходного сигнала источника. Разность или некоторая функция разности между исходным и восстановленным сигналом является мерой искажения, внесённого цифровой системой связи.
Цифровые сигналы
Цифровой сигнал, описываемый уровнем напряжения или тока,-сигнал (импульс - для узкополосной передачи или синусоида - для полосовой передачи), представляющий цифровой символ. Характеристики сигнала (для импульсов - амплитуда, длительность и расположение или для синусоиды - амплитуда, частота и фаза) позволяют его идентифицировать как один из символов конечного алфавита. На рис. 2.2 приведен пример полосового цифрового сигнала. Хотя сигнал является синусоидальным и, следовательно, имеет аналоговый вид, все же он именуется цифровым, поскольку кодирует цифровую информацию. На данном рисунке цифровое значение указывается посредством передачи в течение каждого интервала времени Т сигнала определенной частоты.
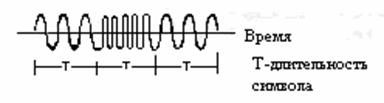
Рисунок. 1.2 - Полосовой цифровой сигнал
Скорость передачи данных. Эта величина в битах в секунду (бит/с) дается формулой R = k/T=(1/T) log2M (бит/с), где к бит определяют символ из М=2к-символьного алфавита, а Т-это длительность κ-битового символа.
Классификация сигналов. Сигнал можно классифицировать как детерминированный (при отсутствии неопределенности относительно его значения в любой момент времени) или случайный, в противном случае. Детерминированные сигналы моделируются математическим выражением x(t) = 5 cos10t. Для случайного сигнала такое выражение написать невозможно. Впрочем, при наблюдении случайного сигнала (также называемого случайным процессом) в течение достаточно длительного периода времени, могут отмечаться некоторые закономерности, которые можно описать через вероятности и среднее статистическое. Такая модель, в форме вероятностного описания случайного процесса, особенно полезна для описания характеристик сигналов и шумов в системах связи.
Периодические и непериодические сигналы. Сигнал x(t) называется периодическим во времени, если существует постоянное Т0 > 0, такое, что
x(t) =x(t + T0) для -∞<t<∞ (1.1)
где через t обозначено время. Наименьшее значение T0, удовлетворяющее это условие, называется периодом сигнала x(t). Период Тп определяет длительность одного полного цикла функции x(t). Сигнал, для которого не существует значения T0, удовлетворяющего уравнение (2.1), именуется непериодическим.
Аналоговые и дискретные сигналы. Аналоговый сигнал x(t) является непрерывной функцией времени, т.е. x(t) однозначно определяется для всех t. Электрический аналоговый сигнал возникает тогда, когда физический сигнал (например, речь) некоторым устройством преобразовывается в электрический. Для сравнения, дискретный сигнал х(кТ) является сигналом, существующим в дискретные промежутки времени; он характеризуется последовательностью чисел, определенных для каждого момента времени, кТ, где к - целое число, а T - фиксированный промежуток времени.
Сигналы, выраженные через энергию или мощность. Электрический сигнал можно представить как изменение напряжения v(t) или тока i(t) с мгновенной мощностью p{t), подаваемой на сопротивление R:
![]() (1.2)
(1.2)
Или
![]() (1.3)
(1.3)
В системах связи мощность часто нормируется (предполагается, что сопротивление 9t равно 1 Ом, хотя в реальном канале оно может быть любым). Если требуется определить действительное значение мощности, оно получается путем "денормирования" нормированного значения. В нормированном случае уравнения (2.2) и (2.3) имеют одинаковый вид. Следовательно, вне зависимости оттого, представлен сигнал через напряжение или ток, нормированная форма позволяет нам выразить мгновенную мощность как
![]() (1.4)
(1.4)
где x(t) — это либо напряжение, либо ток.
2Лекция №2.Каналы связи и их характеристики
Цель лекции: изучение основных видов каналов связи.
Содержание:
а) понятие каналов связи;
б) проводные каналы;
в) волоконно-оптические каналы;
г) беспроводные (радио) каналы.
2.1 Понятие каналов связи
Как было указано в предшествующем обсуждении, канал связи обеспечивает соединение передатчика и приёмника. Физический канал может быть двухпроводной линией, который пропускает электрический сигнал, или стекловолокном, которое переносит информацию посредством модулированного светового луча или подводным каналом океана, в котором информация передаётся акустически, или свободным пространством, по которому несущий информационный сигнал излучается при помощи антенны.
Одна общая проблема при передаче сигнала через любой канал - аддитивный шум. Вообще говоря, аддитивный шум создаётся часто внутри различных электронных компонентов, таких, как резисторы и твёрдотельные устройства, используемые в системах связи. Эти шумы часто называют тепловым шумом. Другие источники шума и интерференции (наложения) могут возникать вне системы, например, переходные помехи от других пользователей канала.
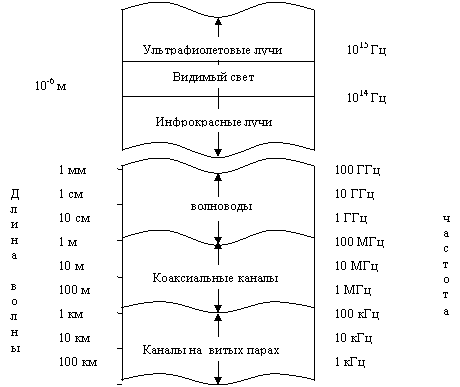
Рисунок 2.1-Частотные диапазоны для каналов связи с направляющими системами
Влияние шума может быть уменьшено увеличением мощности передаваемого сигнала. Однако конструктивные и другие практические соображения ограничивают уровень. мощности передаваемого сигнала. Другое базовое ограничение - доступная ширина полосы частот канала. Ограничение ширины полосы обычно обусловлено физическими ограничениями среды и электрических компонентов, используемых в передатчике и приемнике. Эти два обстоятельства приводят к ограничению количества данных, которые могут быть переданы надёжно по любому каналу связи. Ниже мы опишем некоторые из важных характеристик отдельных каналов связи.
2.2Проводные каналы
Телефонная сеть экстенсивно использует проводные линии для передачи звукового сигнала, а также данных и видеосигналов. Витые проводные пары и коаксиальный кабель в основном, дают электромагнитный канал, который обеспечивает прохождение относительно умеренной ширины полосы частот. Телефонный провод, обычно используемый, чтобы соединить клиента с центральной станции, имеет ширину полосы несколько сотен килогерц. С другой стороны, коаксиальный кабель имеет обычно используемую ширину полосы частот несколько мегагерц. Рисунок 2.1 поясняет частотный диапазон используемых электромагнитных каналов, которые включают волноводы и оптический кабель.
Сигналы, передаваемые через такие каналы, искажаются по амплитуде и фазе, кроме того, на них накладывается аддитивный шум. Проводная линия связи в виде витой пары также склонна к интерференции переходных помех от рядом расположенных пар. Поскольку проводные каналы составляют большой процент каналов связи по всей стране и миру, широкие исследования были направлены на определение их свойств передачи и на уменьшение амплитудных и фазовых искажений в канале.
2.3Волоконно-оптические каналы
Стекловолокно предоставляет проектировщику системы связи ширину полосы частот, которая на несколько порядка больше, чем у каналов с коаксиальным кабелем. В течение прошедшего десятилетия были разработаны оптические кабели, которые имеют относительно низкое затухание для сигнала и высоконадёжные оптические устройства для генерирования и детектирования сигнала. Эти технологические достижения привели к быстрому освоению таких каналов, как для внутренних систем электросвязи, так и для трансатлантических и мировых систем связи. С учётом большой ширины полосы частот, доступной на волоконно-оптических каналах, стало возможно для телефонных компаний предложить абонентам широкий диапазон услуг электросвязи, включая передачу речи, данных, факсимильных и видеосигналов.
Передатчик или модулятор в волоконно-оптической системе связи - источник света, светоизлучающий диод (СИД) или лазер. Информация передается путем изменения (модуляции) интенсивности источника света посредством сигнала сообщения. Свет распространяется через волокно как световая волна, и она периодически усиливается (в случае цифровой передачи детектируется и восстанавливается ретрансляторами) вдоль тракта передачи, чтобы компенсировать затухания сигнала.
В приемнике интенсивность света детектируется фотодиодом, чей выход является электрическим сигналом, который изменяется пропорционально мощности света на входе фотодиода. Источники шума в волоконно-оптических каналах - это фотодиоды и электронные усилители.
Предполагается, что волоконно-оптические каналы заменят почти все каналы проводной линии связи в телефонной сети на рубеже столетия.
2.4 Беспроводные (радио) каналы
В системах беспроводной связи (радиосвязи) электромагнитная энергия передается в среду распространения антенной, которая служит излучателем. Физические размеры и структура антенны зависят, прежде всего, от рабочей частоты. Чтобы получить эффективное излучение электромагнитной энергии, размеры антенны должны быть больше, чем 1/10 длины волны. Следовательно, передача радиостанции с AM на несущей, допустим, fc = 1 МГц, соответствующей длине волны λ = с/fс. = 300 м, требует антенны с диаметром, по крайней мере, 30м. Рисунок 2.2 поясняет различные диапазоны частот для радиосвязи. Способы распространения электромагнитных волн в атмосфере и в свободном пространстве можно разделить на три категории, а именно: распространение поверхностной волной, распространение пространственной волной, распространение прямой волной. В диапазоне очень низких частот (ОНЧ) и звуковом диапазоне, в которых длины волн превышают 10 км, земля и ионосфера образуют волновод для распространения электромагнитных волн. В этих частотных диапазонах сигналы связи фактически распространяются вокруг всего земного шара. По этой причине эти диапазоны частот, прежде всего, используются во всём мире для решения навигационных задач с берега до кораблей.
Ширина полосы частот канала, доступной в этих диапазонах, относительно мала (обычно составляет 1...10 % центральной частоты), и, следовательно, информация, которая передаётся через эти каналы, имеет относительно низкую скорость передачи и обычно неприемлема для цифровой передачи.
Доминирующий тип шума на этих частотах обусловлен грозовой деятельностью вокруг земного шара, особенно в тропических областях. Интерференция возникает из-за большого числа станций в этих диапазонах частот.
Распространение земной волной является основным видом распространения для сигналов в полосе средних частот (0,3...3 МГц). Это-диапазон частот, используемый для радиовещания с AM и морского радиовещания. При AM радиовещании и распространении земной волной дальность связи, даже при использовании мощных радиостанций, ограничена 150 км. Атмосферные шумы, промышленные шумы и тепловые шумы от электронных компонентов приёмника являются основными причинами искажений сигналов, передаваемых в диапазоне средних частот.
Частным случаем распространения пространственной волны является ионосферное распространение. Оно сводится к отражению (отклонение или рефракция волны) передаваемого сигнала от ионосферы, которая состоит из нескольких слоев заряженных частиц, расположенных на высоте 50...400 км от поверхности земли. В дневное время суток разогрев нижних слоев атмосферы солнцем обусловливает появление нижнего слоя на высоте ниже 120км. Эти нижние слои, особенно D-слой, вызывают поглощение частот ниже 2 МГц, таким образом, ограничивая распространения ионосферной волной радиопередач AM радиовещания. Как следствие, мощные радиовещательные сигналы с AM могут распространяться на большие расстояния посредством отражения от ионосферных слоев (которые располагаются на высоте от 140 до 400 км над поверхностью земли) и земной поверхности.
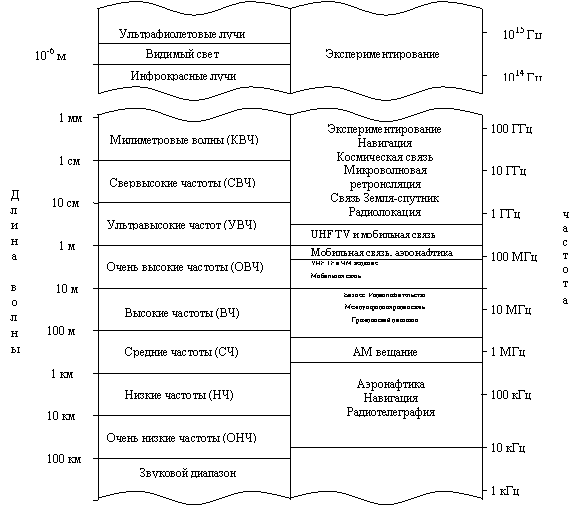
Рисунок 2.2 - Частотные диапазоны для беспроводных каналов связи
3. Лекция №3.Математические модели каналов связи
Цель лекции: изучение математических моделей каналов связи, а также рассмотрение помех в каналах связи.
Содержание:
а) математические модели каналов связи;
б) непрерывный канал;
в) дискретный канал;
г) помехи в каналах связи.
3.1 Математические модели каналов связи
При синтезе систем связи для передачи информации через физические каналы мы используем математические модели, которые отображают наиболее важные характеристики среды передачи. Затем математическая модель канала используется для синтеза кодера и модулятора в передатчике и демодулятора и декодера в приёмнике.
Канал с аддитивным шумом. Самая простая математическая модель для канала связи - это канал с аддитивным шумом, иллюстрируемый на рисунке 3.1. В этой модели передаваемый сигнал s(t) подвержен воздействию лишь аддитивного шумового процесса n(t). Физически аддитивный шум возникает от посторонних электрических помех, электронных компонентов и усилителей в приёмнике систем связи, а также из-заинтерференции сигналов.
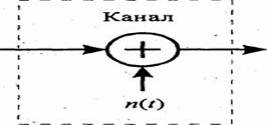
Рисунок 3.1- Канал с аддитивным шумом
Если шум обусловлен в основном электронными компонентами и усилителями в приёмнике, его можно описать как тепловой шум. Этот тип шума характеризуется статистически как гауссовский шумовой процесс. Как следствие, результирующую математическую модель обычно называют каналом с аддитивным гауссовским шумом. Поскольку эта модель применима к широкому классу физических каналов связи и имеет простую математическую интерпретацию, она является преобладающей моделью канала при анализе и синтезе систем связи. Затухание каналов легко включается в модель. Если при прохождении через канал сигнал подвергается ослаблению, то принимаемый сигнал
![]() (3.1)
(3.1)
где α- коэффициент затухания линейного канального фильтра.
Линейный фильтровой канал. В некоторых физических каналах таких, как проводные телефонные каналы, фильтры используются для того, чтобы гарантировать, что передаваемые сигналы не превышают точно установленные ограничения на ширину полосы и, таким образом, не интерферируют друг с другом. Такие каналы обычно характеризуются математически как линейные фильтровые каналы с аддитивным шумом, что иллюстрируется на рисунке 3.2. Следовательно, если на вход канала поступает сигнал s(f), на выходе канала имеем сигнал
![]() (3.2)
(3.2)
где c(f) - импульсная характеристика линейного фильтра, а * обозначает свертку.
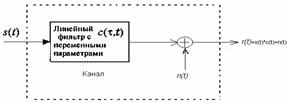
Рисунок 3.2 - Линейный фильтровой канал с аддитивным шумом
Линейный фильтровой канал с переменными параметрами. Физические каналы, такие как подводные акустические каналы и ионосферные радиоканалы, которые возникают в условиях меняющегося во времени многопутевого распространения передаваемого сигнала, могут быть описаны математически как линейные фильтры с переменными параметрами. Такие линейные фильтры характеризуются меняющимися во времени импульсной характеристикой канала c(τ,t), где с(τ,t) – отклик канала в момент времени t на 8-импульс, поданный к входу в момент t= τ.
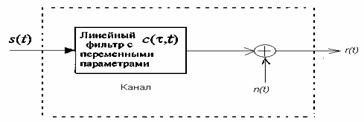
Рисунок 3.3- Линейный фильтровой канал с переменными параметрами и аддитивным шумом
Таким образом, τ представляет «ретроспективную» переменную. Линейный фильтровой канал с переменными параметрами и аддитивным шумом иллюстрируется на рисунке 3.3.
Для входного сигнала s(t) выходной сигнал канала
![]() (3.3)
(3.3)
Хорошей моделью для многопутевого распространения волн через физические каналы типа ионосферы (на частотах ниже 30 МГц) и каналы подвижной сотовой радиосвязи является частный случай (3.3), когда переменная во времени импульсная характеристика канала имеет вид
![]() (3.4)
(3.4)
где {ak(t)} определяет возможные меняющиеся во времени коэффициенты затухания для L путей распространения, {(τk.)} - соответствующие им времена задержки. Если (3.4) подставить в (3.3), то принимаемый сигнал
![]() (3.5)
(3.5)
Следовательно, полученный сигнал состоит из L компонентов распространения, где каждый компонент умножается на ak(t) и запаздывает на. τk.
Три математические модели, описанные выше, адекватно характеризуют большинство физических каналов, с которыми сталкиваются на практике. Эти три модели канала используются в книге для анализа и синтеза систем связи.
Непрерывный канал
Каналы, при поступлении на вход которых непрерывного сигнала на его выходе сигнал тоже будет непрерывным, называют непрерывными. Они всегда входят в состав дискретного канала. Непрерывными каналами являются, например, стандартные телефонные каналы связи (каналы тональной частоты - ТЧ) с полосой пропускания 0,3…3,4 кГц, стандартные широкополосные каналы с полосой пропускания 60…108 кГц, физические цепи и др. Модель канала может быть представлена в виде линейного четырехполюсника (рисунок 3.4)
Рисунок 3.4 - Модель линейного непрерывного канала
Дискретный канал
С целью согласования кодера и декодера канала с непрерывным каналом связи используются устройства преобразования сигналов (УПС), включаемые на передаче и приеме. В частном случае - это модулятор и демодулятор. Совместно с каналом связи УПС образуют дискретный канал (ДК), т.е. канал, пре