


Способы улучшения цифровых сигналов в условиях ограниченного объема априорной информации
Содержание
Основная часть
Выводы
Библиографический список
В современных радиоэлектронных системах в процессе передачи сигнала на него накладываются различные шумы. Процесс приема и перевода сигнала в цифровой вид также сопряжен с внесением в сигнал шумовой составляющей. В большинстве случаев шум является аддитивным. Как правило, при обработке сигнала основной задачей является выделение полезной и ослабление шумовой составляющей. Для решения данной задачи чаще всего используются критерий минимума среднеквадратической погрешности или критерий среднеабсолютного отклонения. В связи с чем актуальной является задача обработки цифрового сигнала одновременно по нескольким критериям (1).
В связи с этим значительный интерес представляет использование многокритериальных методов обработки результатов измерений, представленных единственной реализацией при ограниченном объеме априорной информации о функциях полезной составляющей и шуме.
Цель работы – уменьшение дисперсии шумовой составляющей многокритериальными методами сглаживания входного сигнала, представленного единственной реализацией нестационарного случайного процесса в условиях априорной неопределенности.
Пусть исходные результаты измерений представляют собой дискретную последовательность значений измеряемой физической величины ![]() , полученную в равноотстоящие моменты времени
, полученную в равноотстоящие моменты времени ![]() где
где ![]() (
(![]() - константа). Данную выборку результатов измерений можно рассматривать как реализацию случайного процесса
- константа). Данную выборку результатов измерений можно рассматривать как реализацию случайного процесса ![]() , который является аддитивной смесью полезного сигнала и шума. Упрощенная математическая модель входного сигнала представляется в виде:
, который является аддитивной смесью полезного сигнала и шума. Упрощенная математическая модель входного сигнала представляется в виде:
![]() ,
, ![]() , (1)
, (1)
где ![]() – полезная составляющая;
– полезная составляющая; ![]() – аддитивная шумовая составляющая;
– аддитивная шумовая составляющая; ![]() – объем выборки.
– объем выборки.
Функциональная зависимость от времени ![]() полезной составляющей неизвестна. Закон распределения аддитивного шума
полезной составляющей неизвестна. Закон распределения аддитивного шума ![]() также считается априорно неизвестным. Однако предполагается, что плотность распределения шумовой составляющей имеет нормальный закон, а математическое ожидание равно нулю.
также считается априорно неизвестным. Однако предполагается, что плотность распределения шумовой составляющей имеет нормальный закон, а математическое ожидание равно нулю.
Получение оценки ![]() величины
величины ![]() можно интерпретировать как уменьшение дисперсии аддитивного шума
можно интерпретировать как уменьшение дисперсии аддитивного шума ![]() . Предлагается уменьшать дисперсию измеряемого процесса путем существенного уменьшения суммы квадратов конечных разностей его значений (2):
. Предлагается уменьшать дисперсию измеряемого процесса путем существенного уменьшения суммы квадратов конечных разностей его значений (2):
 (2)
(2)
а также (или) уменьшения суммы квадратов конечных разностей второго порядка:
 . (3)
. (3)
При этом в качестве меры расхождения исходного и полезного сигналов используется сумма:
![]() . (4)
. (4)
Для определения оценок ![]() будем стремиться одновременно уменьшить суммы (2 и(или) 3) и (4). Эта цель достигается минимизацией двухкритериальных целевых функций вида (1–3):
будем стремиться одновременно уменьшить суммы (2 и(или) 3) и (4). Эта цель достигается минимизацией двухкритериальных целевых функций вида (1–3):
 , (5)
, (5)
 , (6)
, (6)
а также минимизаций трехкритериальной целевой функцией вида:
 ,(7)
,(7)
где ![]() и
и ![]() – постоянные регулировочные множители. При реализации рассматриваемых методов сглаживания наилучшие результаты на основе использования имитационного моделирования достигаются при значениях
– постоянные регулировочные множители. При реализации рассматриваемых методов сглаживания наилучшие результаты на основе использования имитационного моделирования достигаются при значениях ![]() в случае использования целевых функций вида (5) и (6) и
в случае использования целевых функций вида (5) и (6) и ![]() ,
, ![]() в случае использования целевой функции вида (7).
в случае использования целевой функции вида (7).
Заметим, что целевые функции (6, 5–7) непрерывны и ограничены снизу на множестве ![]() , поэтому, по крайней мере, в одной точке
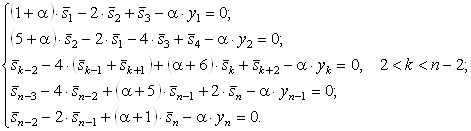
, поэтому, по крайней мере, в одной точке ![]() достигает своего наименьшего значения. Докажем единственность такой точки на примере целевой функции вида (5). В силу необходимого условия экстремума ее координаты должны удовлетворять системе уравнений:
достигает своего наименьшего значения. Докажем единственность такой точки на примере целевой функции вида (5). В силу необходимого условия экстремума ее координаты должны удовлетворять системе уравнений:

![]() , (8)
, (8)
то есть следующей системе ![]() линейных уравнений с
линейных уравнений с ![]() неизвестными
неизвестными
![]() :
: . (9)
. (9)
Перепишем систему (9) в виде:
 . (10)
. (10)
Докажем, что система уравнений (10) имеет единственное решение. С этой целью методом математической индукции установим справедливость утверждения ![]() «первые
«первые ![]() уравнений системы (10) задают переменные
уравнений системы (10) задают переменные ![]() как линейные функции аргумента
как линейные функции аргумента ![]() т.е.
т.е. ![]() , причем
, причем ![]() ,
, ![]() » при каждом
» при каждом ![]() (полагаем здесь
(полагаем здесь ![]() ). При
). При ![]() имеем
имеем ![]()
![]() ,
, ![]() , а в случае
, а в случае ![]() –
– ![]() , где
, где ![]() ,
, ![]() , то есть утверждения
, то есть утверждения ![]() ,
, ![]() верны. В предположении верности утверждения
верны. В предположении верности утверждения ![]() при некотором
при некотором ![]() докажем справедливость утверждения
докажем справедливость утверждения ![]() . Из
. Из ![]() -го уравнения системы (10) получаем
-го уравнения системы (10) получаем
![]()
где ![]() ;
; ![]() .
.
Итак, утверждения ![]() выполнены. С помощью утверждения
выполнены. С помощью утверждения ![]() последнее уравнение системы (10) приводится к виду
последнее уравнение системы (10) приводится к виду ![]() где
где ![]()
![]() ,
, ![]() . Полученное уравнение имеет единственное решение
. Полученное уравнение имеет единственное решение  , по которому однозначно определяются значения
, по которому однозначно определяются значения ![]() , где
, где ![]() .
.
Таким образом, система уравнений (5) имеет единственное решение; аналогично доказательство единственности решения для целевых функций вида (6) и (7).
Для нахождения точки наименьшего значения целевых функций ![]() (5), (6) и (7) применим метод наискорейшего спуска (4). Зададим точность
(5), (6) и (7) применим метод наискорейшего спуска (4). Зададим точность ![]() , с которой будут найдены значения
, с которой будут найдены значения ![]() . В качестве начальной итерации примем
. В качестве начальной итерации примем ![]() ,
, ![]() . При каждом
. При каждом ![]() зададим величину
зададим величину ![]() , присвоив ей значение левой части k-го уравнения систем (10).
, присвоив ей значение левой части k-го уравнения систем (10).
Для целевой функции (6), получим:
 (11)
(11)
Целевая функция (7) сводится к решению системы:
 (12)
(12)
Кроме того, для целевой функции вида (5) введем величину:
 . (13)
. (13)
Для целевой функции вида (6) – величину:
 . (14)
. (14)
Для целевой функции вида (7) – величину:
 . (15)
. (15)
Если ![]() , то в точке
, то в точке ![]() функция
функция ![]() достигает наименьшего значения. Заметим, что
достигает наименьшего значения. Заметим, что ![]() и что
и что ![]() тогда и только тогда, когда
тогда и только тогда, когда ![]() . В случае
. В случае ![]() функция
функция ![]() является квадратичной функцией с положительной второй производной. Решив уравнение
является квадратичной функцией с положительной второй производной. Решив уравнение ![]() , найдем точку минимума
, найдем точку минимума
– для целевой функции вида (5):
 , (16)
, (16)
– для целевой функции вида (6):
 , (17)
, (17)
– для целевой функции вида (7):
 (18)
(18)
Так как в точке ![]() производная функции
производная функции ![]() по направлению вектора
по направлению вектора ![]() положительна, то
положительна, то ![]() ; следовательно
; следовательно ![]() . Произведем коррекцию значений
. Произведем коррекцию значений ![]() :
:
![]() ,
, ![]() .
.
После этого проверяем условие
 . (19)
. (19)
Если неравенство (19) выполняется, требуемая точность считается достигнутой, и расчет заканчивается. Тогда  , т.е. расстояние между двумя последними итерациями в пространстве
, т.е. расстояние между двумя последними итерациями в пространстве ![]() не превосходит
не превосходит ![]() . В случае невыполнения условия (19) повторяется расчет величин
. В случае невыполнения условия (19) повторяется расчет величин ![]() и проверка указанного условия.
и проверка указанного условия.
Таким образом, вектор оценок ![]() итерационно корректируется так, чтобы целевая функция
итерационно корректируется так, чтобы целевая функция ![]() достигла своего наименьшего значения. На некотором шаге итерационного процесса выполнится условие (19), и вычисления прекращаются. Полученный вектор оценок
достигла своего наименьшего значения. На некотором шаге итерационного процесса выполнится условие (19), и вычисления прекращаются. Полученный вектор оценок ![]() с заданной точностью
с заданной точностью ![]() будет являться точкой наименьшего значения целевой функции
будет являться точкой наименьшего значения целевой функции ![]() при заданных начальных условиях (5).
при заданных начальных условиях (5).
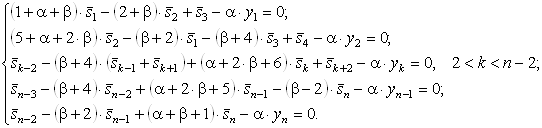
Также в работе предложено аналитическое решение двухкритериальной целевой функции вида (5). Как установлено ранее, точка минимума функции (5) является единственным решением системы линейных уравнений (2, 3)
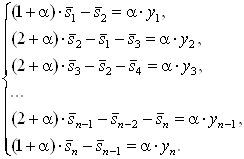 (20)
(20)
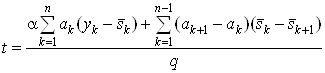
Покажем, что это решение имеет вид
 ,
, ![]() , (21)
, (21)
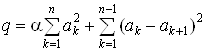
где , (22)
, (22)
 (23)
(23)
|