


Проектирование устройства логического управления (разработка электронного автомата)
1. Структурный синтез управляющего автомата
1.1 Построение направленного графа абстрактного автомата
1.2 Минимизация абстрактного автомата
1.3 Кодирование внутренних состояний и выбор типа памяти
1.4 Определение логических функций возбуждения памяти
1.5 Разработка схемы дискретного автомата
1.6 Моделирование автомата
1.7 Выбор элементной базы
2. Выбор аналоговых элементов
3. Разработка устройств сопряжения по входу
3.1 Согласование датчика с Функцией F2
3.2 Сопряжение внешних ТТЛ сигналов (b1 и b2) с входом В1, В2 автомата
3.3 Тактовый генератор
3.4 Устройство начального пуска
3.5 Разработка таймера
3.6 Устройство реализации функции F1
3.7 Устройство реализации функции F2
4. Разработка устройств сопряжения по выходу
4.1 Согласование электролампы с выходом автомата
4.2 Согласование светодиодов с выходом автомата
5. Устройство индикации мгновенного значения F2
Заключение
Список литературы
Введение
Современное промышленное производство является сложным комплексным процессом, который требует быстрого и многомерного контроля за всеми параметрами. Такой контроль был бы невозможен без применения современной электронной техники и автоматики вследствие того, что существуют многочисленные физические явления недоступные для простого визуального контроля. В настоящее время промышленная автоматика развивается значительными темпами, что связано с постоянно повышающимся уровнем сложности и качества технологических процессов. Электронные промышленные устройства являются сложными системами, в состав которых входят энергетические преобразователи, элементы электропривода, микропроцессорные узлы обработки информации и связи с внешними управляющими объектами, а также датчики различного назначения, устройства согласования с объектом управления. Очевидно, что задача разработки промышленного автомата включает в себя комплекс проблем, которые сами по себе представляют отдельную область современной электроники. Важно обеспечить высокую надежность и защиту от сбоев, поскольку существуют технологические процессы, нарушение которых может привести к катастрофическим последствиям опасным для жизни людей и окружающей среды. Поэтому создание таких устройств требует от разработчика хороших знаний в области электроники, и в области технологических процессов для управления которыми создается промышленный автомат.
Целью данного курсового проекта является разработка электронного автомата при заданных входных сигналах и контролируемых параметрах, а также исполнительных устройствах. Функционирование автомата производится по приведенному в задании алгоритму.
1. Структурный синтез управляющего автомата
1.1 Построение направленного графа абстрактного автомата
При проектировании устройства логического управления будем ориентироваться на синхронный дискретный автомат Мура, поскольку для асинхронного дискретного автомата опасен эффект состязания ("гонок"). Для исключения эффекта "гонок" нужно применять соседнее кодирование логических переменных всех состояний автомата, чтобы переход в следующее состояние отличался от предыдущего только одним разрядом. Кроме того, для автомата Мура таблица выходов вырождается в одну строку, в отличие от автомата Мили. При построении автомата Мура операторные вершины граф-схемы ставятся в соответствие состояниям автомата. Переход в новое состояние осуществляется в зависимости от содержания условной вершины, следующей за операторной.
Построение направленного графа автомата Мура:
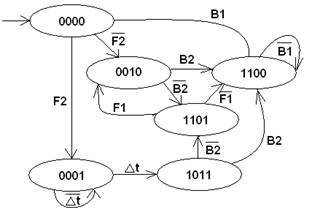
Рис.1 Направленный граф автомата Мура.
Направленный граф автомата построен, исходя из заданного алгоритма, и имеет шесть состояний, соответствующих операторным вершинам исходного алгоритма.
Здесь использованы следующие логические условия и сигналы:
B1= ![]() ; B2=
; B2= ![]() ;
;
При построении графа использованы следующие логические условия и сигналы:
![]()
![]()
Сигналы:
b - сигнал контактного датчика (b=0 - логический ноль, b=1 - логическая единица); ![]() временная задержка,
временная задержка, ![]() .
.
1.2 Минимизация абстрактного автомата
Для сокращения объема памяти минимизируем автомат. При рассмотрении задания видно, что автомат имеет шесть различных состояний. Таким образом нам необходимо три триггера, которые могут закодировать 8 различных состояний. Оставшиеся 2 состояния - называются нештатными, попадание в которые возможно при наличии какой-либо помехи. Упростим направленный граф.
| Q3 | Q2 | Q1 | Q0 | q2 | q1 | q0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 1 | 0 | 0 | 1 |
| 0 | 0 | 1 | 0 | 0 | 1 | 0 |
| 1 | 0 | 1 | 1 | 0 | 1 | 1 |
| 1 | 1 | 0 | 0 | 1 | 0 | 0 |
| 1 | 1 | 0 | 1 | 1 | 0 | 1 |