


Нанотехнология. Перспективы развития
Для понятия нанотехнология, пожалуй, не существует исчерпывающего определения, но по аналогии с существующими ныне микротехнологиями следует, что нанотехнологии - это технологии, оперирующие величинами порядка нанометра. Поэтому переход от "микро" к "нано" - это качественный переход от манипуляции веществом к манипуляции отдельными атомами.
Когда речь идет о развитии нанотехнологий, имеются в виду три направления:
- изготовление электронных схем (в том числе и объемных) с активными элементами, размерами сравнимыми с размерами молекул и атомов;
- разработка и изготовление наномашин;
- манипуляция отдельными атомами и молекулами и сборка из них макрообъектов.
Разработки по этим направлениям ведутся уже давно. В 1981 году был создан туннельный микроскоп, позволяющий переносить отдельные атомы. С тех пор технология была значительно усовершенствована. Сегодня эти достижения мы используем в повседневной жизни: производство любых лазерных дисков, а тем более DVD невозможно без использования нанотехнических методов контроля.
На данный момент возможно наметить следующие перспективы нанотехнологий:
1. Медицина. Создание молекулярных роботов-врачей, которые "жили" бы внутри человеческого организма, устраняя или предотвращая все возникающие повреждения, включая генетические.
Срок реализации - первая половина XXI века.
2. Геронтология. Достижение личного бессмертия людей за счет внедрения в организм молекулярных роботов, предотвращающих старение клеток, а также перестройки и улучшения тканей человеческого организма. Оживление и излечение тех безнадежно больных людей, которые были заморожены в настоящее время методами крионики.
Срок реализации: третья - четвертая четверти XXI века.
3. Промышленность. Замена традиционных методов производства сборкой молекулярными роботами предметов потребления непосредственно из атомов и молекул.
Срок реализации - начало XXI века.
4. Сельское хозяйство. Замена природных производителей пищи (растений и животных) аналогичными функционально комплексами из молекулярных роботов. Они будут воспроизводить те же химические процессы, что происходят в живом организме, однако более коротким и эффективным путем. Например, из цепочки "почва - углекислый газ - фотосинтез - трава - корова - молоко" будут удалены все лишние звенья. Останется "почва - углекислый газ - молоко (творог, масло, мясо)". Такое "сельское хозяйство" не будет зависеть от погодных условий и не будет нуждаться в тяжелом физическом труде. А производительности его хватит, чтобы решить продовольственную проблему раз и навсегда.
Срок реализации – вторая - четвертая четверть XXI века.
5. Биология. Станет возможным внедрение наноэлементов в живой организм на уровне атомов. Последствия могут быть самыми различными - от "восстановления" вымерших видов до создания новых типов живых существ, биороботов.
Срок реализации: середина XXI века.
6. Экология. Полное устранение вредного влияния деятельности человека на окружающую среду. Во-первых, за счет насыщения экосферы молекулярными роботами-санитарами, превращающими отходы деятельности человека в исходное сырье, а во-вторых, за счет перевода промышленности и сельского хозяйства на безотходные нанотехнологические методы.
Срок реализации: середина XXI века.
7. Освоение космоса. По-видимому, освоению космоса "обычным" порядком будет предшествовать освоение его нанороботами. Огромная армия роботов-молекул будет выпущена в околоземное космическое пространство и подготовит его для заселения человеком - сделает пригодными для обитания Луну, астероиды, ближайшие планеты, соорудит из "подручных материалов" (метеоритов, комет) космические станции. Это будет намного дешевле и безопаснее существующих ныне методов.
8. Кибернетика. Произойдет переход от ныне существующих планарных структур к объемным микросхемам, размеры активных элементов уменьшаться до размеров молекул. Рабочие частоты компьютеров достигнут терагерцовых величин. Получат распространение схемные решения на нейроноподобных элементах. Появится быстродействующая долговременная память на белковых молекулах, емкость которой будет измеряться терабайтами. Станет возможным "переселение" человеческого интеллекта в компьютер.
Срок реализации: первая - вторая четверть XXI века.
9. Разумная среда обитания. За счет внедрения логических наноэлементов во все атрибуты окружающей среды она станет "разумной" и исключительно комфортной для человека.
Срок реализации: после XXI века.
Основные этапы в развитии нанотехнологии:
1959 г. Лауреат Нобелевской премии Ричард Фейнман заявляет, что в будущем, научившись манипулировать отдельными атомами, человечество сможет синтезировать все, что угодно.
1981 г. Создание Бинигом и Рорером сканирующего туннельного микроскопа - прибора, позволяющего осуществлять воздействие на вещество на атомарном уровне.
1982-85 гг. Достижение атомарного разрешения.
1986 г. Создание атомно-силового микроскопа, позволяющего, в отличие от туннельного микроскопа, осуществлять взаимодействие с любыми материалами, а не только с проводящими.
1990 г. Манипуляции единичными атомами.
1994 г. Начало применения нанотехнологических методов в промышленности.
Однако принято считать, что нанотехнология "началась" когда 70 лет назад Г. А. Гамов впервые получил решения уравнения Шредингера, описывающие возможность преодоления частицей энергетического барьера даже в случае, когда энергия частицы меньше высоты барьера. Новое явление, называемое туннелированием, позволило объяснить многие экспериментально наблюдавшиеся процессы. Найденное решение позволило понять большой круг явлений и было применено для описания процессов, происходящих при вылете частицы из ядра - основы атомной науки и техники. Многие считают, что за грандиозность результатов его работ, ставших основополагающими для многих наук, Г. А. Гамов должен был быть удостоен нескольких Нобелевских премий.
Развитие электроники подошло к использованию процессов туннелирования лишь почти 30 лет спустя: появились туннельные диоды, открытые японским ученым Л. Есаки, удостоенным за это открытие Нобелевской премии. Еще через 5 лет Ю. С. Тиходеев, руководивший сектором физико-теоретических исследований в московском НИИ "Пульсар", предложил первые расчеты параметров и варианты использования приборов на основе многослойных туннельных структур, позволяющих достичь рекордных по быстродействию результатов. Спустя 20 лет они были успешно реализованы. В настоящее время процессы туннелирования легли в основу технологий, позволяющих оперировать со сверхмалыми величинами порядка нанометров (1нанометр=10-9 м).
До сих пор создание миниатюрных полупроводниковых приборов основывалось, в основном, на технике молекулярно-лучевой эпитаксии (выращивания слоев, параллельных плоскости подложки), позволяющей создавать планарные слои из различных материалов с толщиной вплоть до моноатомной. Однако эти процессы имеют значительные ограничения, не позволяющие создавать наноскопические структуры. К этим ограничениям относится высокая температура процессов эпитаксии - до нескольких сотен градусов, при которой хоть и обеспечивается рост высококачественных пленок, однако не обеспечивается локальность формируемых областей. Кроме того, высокие температуры поверхности подложки стимулируют диффузионные процессы, "размывающие" планарные структуры. Более "холодные" технологии осаждения, типа напыления, из-за одновременности осаждения материала на всю подложку, одновременного роста в разных местах зерен осаждаемого материала и последующего образования дефектов на их границах раздела также не позволяли создавать бездефектные наноструктуры.
Формирование элементов нанометрового размера первоначально планировалось осуществлять методами электронно-лучевой литографии, дополняемой методами ионного травления. Однако высокоэнергетичный электронный луч, рассеиваясь в подложке, вызывает значительные разрушения в материале, расположенном как под, так и в районе области фокусировки, практически перечеркивая возможность создания многослойных схем с нанометровыми размерами элементов. Возникла тупиковая ситуация, решение которой было найдено в 1981 году.
2 Туннельный микроскоп.
В 1981 году кардинально новым шагом, открывающим возможность создания высоколокальных - с точностью до отдельных атомов - низкоэнергетичных технологических процессов, явилось создание Г. Бинингом и Г. Рорером, сотрудниками швейцарского отделения компании IBM, сканирующего туннельного микроскопа, за которое они в 1985 году были удостоены Нобелевской премии.
Основой изобретенного микроскопа является очень острая игла, скользящая над исследуемой поверхностью с зазором менее одного нанометра. При этом электроны с острия иглы туннелируют через этот зазор в подложку. Исключительно резкая зависимость тока туннелирующих электронов от расстояния (при изменении зазора на одну десятую нанометра ток изменяется в 10 раз) обеспечила высокую чувствительность и высокую разрешающую способность микроскопа. Стабильное удержание иглы на столь малом расстоянии от подложки обеспечивается применением электронной следящей системы, под воздействием результатов измерения туннельного тока управляющей пьезоманипулятором, перемещающим иглу, что позволяет удерживать зазор с точностью выше сотых долей нанометра. Измеряя величины управляющих сигналов, при известной чувствительности пьезоманипулятора к перемещению под действием напряжения, определяют высоту исследуемой области поверхности. Сканируя над исследуемой поверхностью, по результатам измерений высот различных областей определяют профиль поверхности с точностью до отдельных атомов.
Однако кроме исследования поверхности, создание нового типа микроскопов открыло принципиально новый путь формирования элементов нанометровых размеров. Были получены уникальные результаты по перемещению атомов, их удалению и осаждению в заданную точку, а также локальной стимуляции химических процессов.
Обычно, для того чтобы провести измерения с помощью туннельных микроскопов между зондом и проводящей подложкой, прикладывают низкие напряжения в несколько милливольт, что ограничивает максимальную энергию туннелирующих электронов величиной, меньшей энергии тепловых колебаний атомов. При проведении нанотехнологических процессов между зондом и подложкой прикладываются напряжения в несколько вольт и даже десятков вольт, что позволяет активизировать проведение атомно-молекулярных процессов, характеризующихся переносом атомов, вплоть до локального испарения, а также стимулировать локальные химические реакции.
Нанотехнологические процессы могут проводиться в различных средах: вакууме, газах и жидкостях. В вакууме, в основном, проводятся процессы полевого испарения материала с иглы на подложку и наоборот. Значительно большие технологические возможности открываются в установках с напуском технологических газов. В газовых средах проводят локальные химические реакции, позволяющие, по сравнению с вакуумными установками, расширить диапазон используемых материалов, повысить производительность технологических установок.
Напуск технологического газа или паров вещества, используемых в технологической реакции, приводит к образованию на поверхности подложки адсорбированного слоя. Зонд сканирующего туннельного микроскопа приближается к поверхности подложки и практически погружается в адсорбированный слой. Приложение напряжения между зондом и подложкой стимулирует прохождение нескольких процессов:
- поверхностной миграции полярных молекул адсорбированного вещества к зонду;
- поляризации вещества под зондом;
- удаления вещества из-под зонда за счет нагрева;
- возникновения и поглощения плазмонных колебаний;
- межатомного взаимодействия зонда, подложки и вещества;
- локальных химических реакций.
Данные процессы в ряде случаев являются конкурирующими, и окончательный результат сильно зависит от типа применяемого вещества.
В жидких средах также осуществляют локальные химические реакции, хотя отвод продуктов реакции сложнее, чем в предыдущем случае.
Синтезируя подложку с определенными свойствами в газовых средах специального состава, можно создавать наноструктуры различных типов, пример показан на рис.
Ширина линии букв - десятки атомов
В последние годы для работы с диэлектрическими подложками применяются атомно-силовые микроскопы, однако они не позволяют производить локальную активацию атомов и молекул под зондом, то есть при их помощи невозможно осадить проводящий материал на диэлектрическую подложку. Что же касается современной техники на базе туннельных микроскопов, то с их помощью можно активировать лишь материал, расположенный между вершиной зонда и проводящей подложкой, а не диэлектрической, как это требуется для практических целей.
Поэтому главное направление развития технологии создания проводящих элементов на изолирующих материалах, это создание принципиально новых типов активаторов нанотехнологических процессов.
3 Электронные элементы на основе нанотехнологий.
Новые потенциальные технологические возможности нанотехнологии открыли пути к реализации новых типов транзисторов и электронных функциональных устройств, выполняющих соответствующие радиотехнические функции за счет особенности взаимодействия электронов с наноструктурами. К транзисторам новых типов относятся одноэлектронные транзисторы, предложенные К. Лихаревым, в которых доминируют эффекты поодиночного прохождения электронов через транзистор и управления параметрами данного процесса под действием потенциала управляющего электрода. Достоинством транзистора данного типа и функциональных приборов на его основе является исключительно низкое энергопотребление. К сравнительным недостаткам - наивысшие по трудности реализации требования создания нанометровых областей наименьших размеров, позволяющих осуществить работу данных устройств при комнатной температуре. К принципиально другому типу транзисторов следует отнести транзисторы Ааронова-Бома, в которых используются волновые свойства электронов. Под воздействием управляющего напряжения, создающего несимметричность параметров волнового распространения электрона по двум расходящимся, а потом сходящимся проводникам, происходит интерференция волновых функций электрона, приводящая к модуляции выходного электронного потока. К достоинствам транзисторов данного типа следует отнести сверхвысокое быстродействие, достигающее терагерцового диапазона, а к недостаткам - наивысшие требования к однородности материалов, выполнение которых необходимо для минимизации рассеяния электронов при распространении их по данным двум проводникам. К третьему типу нанотранзисторов относится полевой транзистор, сформированный на основе нанопроводников, в котором под воздействием управляющего напряжения происходит полевая модуляция проводимости проводника, по которому течет ток. Данный транзистор, хоть и не является рекордсменом по сравнению с первыми двумя по энергопотреблению и быстродействию, предъявляет наиболее простые технологические требования к технологии создания и позволяет достичь частотного диапазона в сотни гигагерц.
В 1993 г. было разработано новое семейство цифровых переключающих приборов на атомных и молекулярных шнурах. На этой основе разработаны логические элементы НЕ-И и НЕ-ИЛИ. Размер такой структуры ~ 10 нм, а рабочая частота ~ 1012 Гц.
Одним из важнейших достоинств нанотехнологии, реализующей процесс послойной сборки, является возможность трехмерного изготовления наноэлектронных схем. Наличие такого свойства у разрабатываемой технологии исключительно важно, так как полупроводниковая микроэлектроника, фактически, так и осталась планарной, позволив реализовать очень ограниченное число уровней металлизации для формирования межсоединений. Данный недостаток технологии порождал проблему, названную Я. А. Федотовым "тиранией межсоединений". Она не только сдерживает развитие прогрессивных интегральных схем с большим числом элементов, но и не позволяет аппаратно реализовать исключительно важные типы нейронных схем, в которых доминирует большое число связей между элементами.
4 Наноботы.
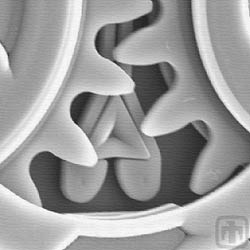
MEMS-технологии и мини-роботы Сандиа
 Многие эксперты склонны отсчитывать историю микротехнологий от знаменитой лекции нобелевского лауреата Ричарда Фейнмана, прочитанной им в 1959 году перед Американским физическим обществом. Богатейшая фантазия Фейнмана и талантпопуляризатора позволили ему обрисовать потенциал микротехнологий в самых ярких красках: в его лекции были и крошечные компьютеры, и системы хранения данных, электронные компоненты и даже микроскопический инструментарий миниатюрных роботов. Но если пророчества Фейнмана в области микроэлектроники начали обрастать плотью очень быстро - уже в 1960-70-е годы, - то прогресс в электромеханических микросистемах шел гораздо медленнее. Лишь в 1980-е годы ведущие университеты и правительственные лаборатории начали осваивать сравнительно недорогие способы изготовления и сборки крошечных механических деталей, для чего была разработана технология микроэлектромеханических систем, или MEMS, использующая методы литографии и инструментарий полупроводниковой промышленности.
Многие эксперты склонны отсчитывать историю микротехнологий от знаменитой лекции нобелевского лауреата Ричарда Фейнмана, прочитанной им в 1959 году перед Американским физическим обществом. Богатейшая фантазия Фейнмана и талантпопуляризатора позволили ему обрисовать потенциал микротехнологий в самых ярких красках: в его лекции были и крошечные компьютеры, и системы хранения данных, электронные компоненты и даже микроскопический инструментарий миниатюрных роботов. Но если пророчества Фейнмана в области микроэлектроники начали обрастать плотью очень быстро - уже в 1960-70-е годы, - то прогресс в электромеханических микросистемах шел гораздо медленнее. Лишь в 1980-е годы ведущие университеты и правительственные лаборатории начали осваивать сравнительно недорогие способы изготовления и сборки крошечных механических деталей, для чего была разработана технология микроэлектромеханических систем, или MEMS, использующая методы литографии и инструментарий полупроводниковой промышленности.
Фактически, понадобилось больше тридцати лет на то, чтобы появилось первое коммерческое приложение MEMS. Одной из первых MEMS-технологий, получивших повсеместное распространение, стали сенсоры ускорения, устанавливаемые сейчас практически во все современные автомобили для детектирования столкновения и выпуска защитных воздушных подушек. Массачусетская компания Analog Devices, изготовившая первые такие сенсоры в 1993 году, сейчас продает автомобилестроителям около 50 миллионов MEMS-чипов в год. Есть и еще целый ряд успешных MEMS-изделий, таких как головки микроструйных принтеров или сенсоры давления, которые компания Motorola сотнями миллионов поставляет медицинской и автомобильной промышленности. Или, скажем, цифровые проекторы высокого разрешения Texas Instruments, построенные на основе MEMS-массивов микрозеркал. За последние годы удалось достичь заметных успехов в изготовлении моторов, насосов и зажимов, сенсоров давления и смещения - короче, множества самых разных по назначению механических агрегатов, настолько малых, что их не видно невооруженным глазом. Однако запустить подобные продукты в массовое производство оказалось гораздо труднее, чем полагали оптимисты.
Сейчас самой перспективной областью внедрения MEMS принято считать телекоммуникации. Так, в конце 2000 года от Национальной лаборатории Сандиа, принадлежащей министерству энергетики США, отпочковалась частная компания MEMX, занимающаяся вопросами коммерческого применения создаваемых в лаборатории MEMS-технологий. Компания сфокусировалась в своей деятельности на оптических коммутаторах для оптоволоконных телекоммуникационных систем. В их основу положена фирменная технология Сандиа под названием SUMMiT V (от Sandia Ultraplanar Multilevel MEMS Technology). Это микромашинный процесс обработки поверхности чипа напылением и травлением, охватывающий пять независимых слоев поликристаллического кремния - четыре «механических» слоя для построения механизмов и один электрический для обеспечения межсоединений электросхемы. Технология позволяет доводить размеры механических элементов до 1 мкм.
Опыт, накопленный разработчиками Сандиа 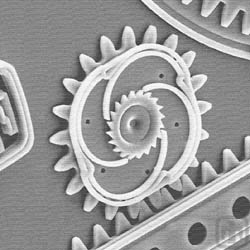 в миниатюризации электромеханических систем, помог создать и весьма эффектных микроскопических роботов. Построенная в середине 1990-х годов модель автономного робота MARV (Miniature Autonomous Robotic Vehicle) имела объем около 1 кубического дюйма, хотя робот почти целиком был изготовлен из коммерчески доступных компонентов. К 2000 году его размеры удалось уменьшить в четыре с лишним раза. Эта крошечная машина на гусеничном ходу имеет полимерный каркас, шесть колес, два электромотора, процессор с 8 Кбайт памяти, датчик температуры, микрофон, видеокамеру, химический сенсор и три батарейки от часов. Надо сказать, именно бытовые элементы питания помешали сделать устройство еще миниатюрнее. Машины планируется оборудовать системой беспроводной связи, после чего группа микророботов сможет объединяться для совместного решения задач под управлением центрального компьютера. По замыслу разработчиков, основной областью применения таких роботов может стать поиск и обезвреживание бомб и мин, опасных биологических и химических материалов. Благодаря малым размерам и высокой проходимости микророботы очень перспективны для решения разведывательных задач. Однако емкость современных батарей катастрофически мала, ее хватает лишь на преодоление десятка метров.
в миниатюризации электромеханических систем, помог создать и весьма эффектных микроскопических роботов. Построенная в середине 1990-х годов модель автономного робота MARV (Miniature Autonomous Robotic Vehicle) имела объем около 1 кубического дюйма, хотя робот почти целиком был изготовлен из коммерчески доступных компонентов. К 2000 году его размеры удалось уменьшить в четыре с лишним раза. Эта крошечная машина на гусеничном ходу имеет полимерный каркас, шесть колес, два электромотора, процессор с 8 Кбайт памяти, датчик температуры, микрофон, видеокамеру, химический сенсор и три батарейки от часов. Надо сказать, именно бытовые элементы питания помешали сделать устройство еще миниатюрнее. Машины планируется оборудовать системой беспроводной связи, после чего группа микророботов сможет объединяться для совместного решения задач под управлением центрального компьютера. По замыслу разработчиков, основной областью применения таких роботов может стать поиск и обезвреживание бомб и мин, опасных биологических и химических материалов. Благодаря малым размерам и высокой проходимости микророботы очень перспективны для решения разведывательных задач. Однако емкость современных батарей катастрофически мала, ее хватает лишь на преодоление десятка метров.
Роботы «сухие» и «мокрые»
Нанотехнологии, особенно наномедицина, развиваются в двух принципиально разных направлениях, условно именуемых «сухой нанотехнологией» в механической традиции и «мокрой нанотехнологией» в биологической традиции.
«Сухие нанотехнологии» чаще всего отталкиваются от уже имеющихся технологий - вроде сканирующих микроскопов, которые способны перемещать отдельные атомы и молекулы. Пока что, как правило, это выражается в форме своеобразных «нанограффити», то есть складывании из атомов собственных имен исследователей, названий их институтов или щедрых спонсоров. Но все такие эксперименты обычно ограничены плоскостью. Укладывание молекул друг на друга - следующая задача, которая будет решена в ближайшие годы.
Например, исследователями Гарвардского университета сконструирован первый «нанопинцет» общего назначения, использующий пару электрически управляемых углеродных нанотрубок. С помощью этого механизма удается манипулировать 300-нанометровыми кластерами полистироловых микросфер или извлекать единственный 20-нанометровый полупроводниковый провод из массы аналогичных перепутанных проводов. В ближайшем будущем ученые надеются создать столь малый нанопинцет, чтобы захватывать отдельные крупные молекулы.
Быть может, «мокрой нанотехнологии» следует сконцентрироваться на конструировании и модификации белковых молекул, знаменитых своими выдающимися способностями к самосбору. Многие ученые полагают, что ключ к прогрессу лежит именно здесь. Живые системы используют множество молекулярных машин, таких как молекулярные моторы. Поэтому логично попытаться приспособить к нашим потребностям уже имеющиеся в природе механизмы, используя их для приведения в движение крошечных насосов, рычагов и зажимов. Концепцию «мокрых наноботов» иногда именуют также микробиороботами.
Исследователям из Нью-Йоркского университета, избравшим «подход самосбора», удалось научиться генерировать комплементарные нити ДНК, которые объединяют себя в сложные структуры желаемой конфигурации. Так были выстроены кубы, восьмигранники и другие правильные фигуры, состоящие всего из нескольких тысяч нуклеотидов. Избрав аналогичный подход, ученые генетически модифицировали природный биомотор, в естественных условиях встречающийся в ферменте аденозинтрифосфатозе (ATPase). В результате был изготовлен первый гибридный наномотор с небиологическими элементами из 100-нанометровых полос азотистого кремния. Подобно микроскопическому пропеллеру, он вращается со скоростью 200 оборотов в минуту.
Как показывают предварительные оценки, механические системы в конечном счете смогут обеспечить более высокие скорости работы и большую эффективность управления нанороботом, нежели системы 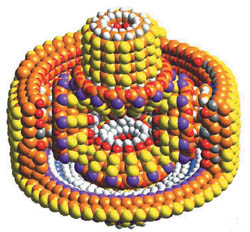 биологические. Однако важным преимуществом последних является то, что зачастую их функциональные компоненты можно частично или целиком брать из уже имеющихся естественных живых систем, тем самым существенно сокращая время разработки.
биологические. Однако важным преимуществом последних является то, что зачастую их функциональные компоненты можно частично или целиком брать из уже имеющихся естественных живых систем, тем самым существенно сокращая время разработки.
Саморепликация.
Производство нанороботов всё ещё затруднено по двум причинам: проблема «толстых пальцев»- недостаточная разрешающая способность современных приборов и сложность проектирования схемотехнических решений. Эти проблемы, как ни странно, возможно решить только при помощи самих нанотехнологий. Если для проектирования схемы нужен мощный процессор, работающий на высокой частоте, то для массовой сборки нанороботов нужны нанороботы, т.к. только они по своему предназначению могут предоставить необходимый инструментарий для сборки механизма. Человеку не под силу любыми устройствами произвести количество нанороботов, соответствующее современной концепции их применения. Для обеспечения простейших задач, поставленных перед нанороботом, их нужны сотни, если не тысячи. На сегодняшний день разработка в этом направлении возможна лишь в теоретическом виде. Однако уже существуют макроскопические роботы, способные собрать себе подобного, а затем запрограммировать его. Также этот вопрос исследует философия. Дело в том, что при разговорах о репликации, самовоспроизведении роботов неизбежно возникают мысли о выходе их из-под контроля. Вплоть до того, что нанотехнология рассматривается сейчас некоторыми как первый шаг человечества по скользкому краю апокалиптической ямы, заполненной «серой слизью». Этот термин получил довольно широкое хождение с подачи Билла Джоя, главного ученого Sun Microsystems, опубликовавшего в журнале Wired нашумевшую статью «Нуждается ли в нас будущее?» Джой и его идейные соратники настойчиво предупреждают, что микроскопические самовоспроизводящиеся роботы, невидимые человеческому глазу, в случае выхода из-под контроля могут привести к нашествию безликой, липкой и пожирающей все вокруг массы - «серой слизи». Причем идею эту вовсе нельзя назвать высосанной из пальца, поскольку некоторые рьяные поборники новейших технологий уже выдвигали предложения по разработке армии «синей слизи» - разрушительных микромашин - в качестве мощного оружия.
В ответ на подобные опасения и тревогу авторитетные сторонники нанопрогресса (Ральф Меркль, в частности) выдвигают свои аргументы. Хотя нанотехнология действительно предлагает использовать репликацию для сведения к минимуму стоимости производства, она не предлагает копировать живые системы. Живые системы адаптируются к среде самым чудесным образом и способны выживать в сложных природных условиях. Нанотехнология, напротив, предлагает строить молекулярные машинные системы, похожие на микроскопические версии оборудования сегодняшних фабрик и заводов. Рука-манипулятор микроробота, уменьшенная до субмикронного размера, должна уметь брать и собирать молекулярные детали, подобно тому, как манипуляторы заводских роботов орудуют гайками и болтами. К сожалению, говорит Меркль, очень легко пойти по ложной тропе из-за простого факта: единственная репликационная система, с которой знакомо большинство из нас, - это биологические самовоспроизводящиеся системы. Мы автоматически начинаем подразумевать, что нанотехнологические репликационные системы будут подобны биологическим. Но машины, которые изготовляют люди, очень мало похожи на живые системы, поэтому и молекулярные системы производства скорее всего будут столь же непохожими.
В качестве иллюстрации к своим доводам Меркль приводит экспериментальную систему «экспоненциальной сборки», создаваемую техасской корпорацией Zyvex. Здесь разрабатываются механические системы для сборки устройств микронного, субмикронного и молекулярного масштаба. На микронном уровне, используя уже имеющиеся MEMS-технологии, проектируется простая роботизированная рука «взять-и-положить», способная манипулировать сложными планарными деталями микронного масштаба, изготовленными с помощью литографии. Из этих деталей собирается роботизированная рука, способная манипулировать специально разработанными MEMS-деталями. Процесс получил название «экспоненциальная сборка», поскольку это репликационная технология, начинающаяся с единственной роботизированной руки на кремниевой пластине, которая сама собирает другие роботизированные руки, беря детали, заранее уложенные на пластине в точно известных местах. Хотя количество собранных таким методом роботизированных рук может возрастать экспоненциально (до некоторых пределов, понятно, накладываемых системой производства), этот процесс требует, среди прочего, литографически изготовленных деталей, а также подачи электроэнергии и управляющих сигналов для координации сложных движений рук-манипуляторов. Достаточно отключить энергию, управляющие сигналы или лишить микроробота деталей - и он будет действовать так же, как и его заводской собрат, изъятый со сборочной линии и заброшенный в глухой лес.
К сожалению, далеко не все ученые, работающие в области нанотехнологий, придерживаются подобной логики, и среди них один из ведущих специалистов лаборатории Сандиа - Джеф Бринкер, снискавший международную известность благодаря работам в области самосборных нанокомпозитных материалов. При его непосредственном участии достигнуты весьма примечательные успехи в создании материалов, способных к спонтанной самоорганизации в сложные трехмерные конструкции наномасштаба. Главный же интерес исследований Бринкера, по его собственным словам, это научиться придавать материалам «жизнеподобные» свойства - то есть получать такие материалы, которые чувствуют окружающую среду и соответствующим образом реагируют, могут самоисцеляться и избегать угрожающих их существованию обстоятельств. В двух словах, цель Бринкера - наноматериалы, занимающие промежуточное положение между живым и неживым. Разумеется, робот из таких материалов - это уже далеко не неуклюжий заводской манипулятор в лесной чаще.
Трезвомыслящие ученые прекрасно понимают, что нанотехнология способна породить серьезные проблемы. Любая технология может быть использована для нанесения ущерба, а не только для всеобщего блага. По масштабам будущего воздействия на человечество нанотехнологии наверняка не уступят индустриальной революции.
В калифорнийском Пало-Альто в 1989 году была создана специальная некоммерческая организация «Предусмотрительный институт» (Foresight Institute) и девизом «Готовясь к нанотехнологиям» (основатель и глава института - Эрик Дрекслер). Здесь был подготовлен набор правил «техники безопасности» для разработчиков и изготовителей молекулярных систем. Среди руководящих принципов, например, такие: искусственные системы-репликаторы не должны иметь способность к воспроизводству в естественной, неконтролируемой окружающей среде. Они должны быть абсолютно зависимыми от источника искусственного питания или от искусственных компонентов, не встречающихся в природе. Они должны использовать коды выявления ошибок и шифрование, предотвращающее непреднамеренные изменения в их конструкции.
Все эти правила выкристаллизовались из бурных дискуссий о самых разных сценариях возможного развития нанотехнологий. Очевидно, что наше понимание развивающейся технологии эволюционирует, а значит, претерпевают изменения и рекомендации, отражая степень осмысления учеными того, как обеспечивать безопасное развитие нанотехнологий. Но в конечном счете диктовать реальный спектр нанотехнологических приложений будут вовсе не ученые, а правительства и индустрия.
Современные разработки.
Существующие решения нельзя назвать нанороботами в полном смысле этого слова, но микророботы являются достойными макроскопическими моделями.
В Массачусетском технологическом институте сейчас разрабатывается серия микророботов под общим названием NanoWalkers («наноскороходы»). Некоторые из них оборудованы иглами-пробниками сканирующего туннельного микроскопа для отображения и подталкивания атомов. Другие - щупами атомно-силового микроскопа для работы с непроводящими материалами. Третьи - микроманипуляторами для перемещения и сбора деталей микронного размера, а со временем и атомов. Попутно создается набор инструментов для наномасштабного напыления, травления, обработки и формирования изображения. Способные стремительно перемещаться, роботы-сборщики черпают энергию с электрически заряженной рабочей поверхности, образованной перемежающимися полосами разной электрической полярности. Связь с микророботами осуществляется через инфракрасную систему, монтируемую на верхушке их приземистого корпуса. Цифровая ПЗС-камера следит за перемещением и местонахождением роботов, направляя их к нужному месту, а затем вступает в действие система тонкого позиционирования, наводящая пробники-манипуляторы на конкретные молекулы или атомы.
Преимущество подобной концепции в следующем. Вместо того чтобы последовательно проводить объект сборки через техпроцессы, каждый раз передвигая и заново позиционируя микроскопический узел, система позволяет держать его на одном месте - а двигаются пусть недорогие мобильные микророботы, управляемые компьютером. Надо сказать, что индустрия, привыкшая к конвейерному производству, новую концепцию воспринимает с трудом.
Пьезокерамические ножки, с помощью которых роботы NanoWalker перемещаются, могут гнуться внутрь и наружу, удлиняться и укорачиваться, в зависимости от формы приложенного электрического сигнала. Делая около 18 тысяч шажков в секунду, роботы способны носиться намного быстрее, скажем, тараканов (делающих около 13 шажков в секунду), причем разным «аллюром» - либо семенить крошечными шагами по 2 нанометра, либо одним махом покрывать по 50 микрон за раз. Пока что в МТИ сосредоточились на том, чтобы научить своих роботов двигаться плавно и интегрировать в работу тончайшие острия сканирующих и атомно-силовых микроскопов.
Некоторые исследовательские центры, не стремившиеся любой ценой сделать микророботов автономными, добились успеха в решении других задач. Так, в немецком университете Карлсруэ управляемые по проводам роботы уже действуют на предметных столиках оптических микроскопов и в вакуумных камерах сканирующих электронных микроскопов. Они справляются с таким делом, как сбор оптических систем микронного масштаба или захват и перенос отдельных биологических клеток. Бесспорно менее проворные, чем NanoWalker, и предназначенные для манипулирования более крупными объектами, немецкие роботы MINIMAN (от Miniaturized Robot for Micromanipulation) оперируют такими инструментами, как микрозажимы и микропипетки.
После того как управляющий роботом оператор щелкает указателем мышки по изображению конкретной клетки на мониторе, робот, ведомый компьютеризированной системой зрения, находит именно эту клетку, аккуратно засасывает ее в микропипетку, переносит в другое место и выпускает. При другом сценарии два робота, работающие совместно, могут удерживать клетку и впрыскивать в нее раствор медикамента или красителя. Подобные операции уже так отточены, что на их выполнение требуется буквально секунда. Несколько иной аппарат MINIMAN III способен собирать и настраивать систему из 1- и 2-миллиметровых, причем оператор вмешивается в процесс сборки всего один раз. Пока что многие из осваиваемых роботами операций автоматизированы лишь частично, однако со временем все работы будут осуществляться без участия человека. Разработка микророботов MINIMAN ведется совместно институтами Германии, Швеции, Испании, Великобритании и Италии. Содействие им оказывают голландская фирма Philips Bedrijven и немецкая Kammrath & Weiss.
Среди крупномасштабных разработчиков MEMS – фирма Intel, известная своими процессорными и сетевыми решениями. Свой интерес к технологии они объясняют стремлением разработать интегрированные всё-в-одном микросхемы. Уже сегодня интегральные схемы, сод