


Навигационный проект перехода Малага - Неаполь т/х "Пархоменко"
ХЕРСОНСКИЙ МОРСКОЙ КОЛЛЕДЖ
Судоводительское отделение
КУРСОВОЕ ПРОЕКТИРОВАНИЕ ПО ПРЕДМЕТУ
«НАВИГАЦИЯ И ЛОЦИЯ»
ПО ТЕМЕ
«НАВИГАЦИОННЫЙ ПРОЕКТ ПЕРЕХОДА МАЛАГА – НЕАПОЛЬ Т/Х «ПАРХОМЕНКО»
Херсон – 2008г.
Введение
Основная задача курсового проектирования заключается в наиболее полном использовании приобретенных навыков штурманской работы, всестороннего изучения условий плавания, выбора безопасного и экономически выгодного пути, выполнение предварительной прокладки с расчётами, включающими оценки навигационной безопасности и себестоимости перехода, разработку фактического плана конкретного перехода на данном судне, в определенных сезонных условиях, на предварительно самостоятельно подобранном комплекте карт и руководств для плавания.
В процессе работы над курсовым проектом всесторонне прорабатываются и закрепляются теоретические знания и практические навыки штурманской работы, знание и владение принципами основ организации штурманской службы на флоте. Таким образом, курсовое проектирование является итоговой отчетной работой включающей в себя вопросы изученные в период обучения в училище, знание и чёткое понимание которых является непременной основой подготовки квалифицированного судоводителя, способного чётко, конкретно и точно проработать, отразить и обеспечить контроль всего спектра вопросов безопасности мореплавания.
Курсовой проект состоит из пояснительной записки, включающей в себя: аннотацию, описание, расчёты, перечни источников и графическую часть проекта. В процессе написания курсового проекта использовалась соответствующая нормативная документация, определяющая основные принципы и положения навигации и организации службы.
Значение транспорта в народном хозяйстве объективно определяют следующие требования, которым транспорт должен отвечать:
Первое – своевременное, качественное и полное удовлетворение потребностей хозяйства и населения в перевозках;
Второе – относительное снижение транспортных издержек на удовлетворение потребностей народного хозяйства и населения в перевозках;
Третье – обеспечение внешнеэкономических связей, участие транспорта в международном разделении общественного труда.
Существенными особенностями и преимуществами обладает морской транспорт. Организация смешанных перевозок морским транспортом позволяет сократить расстояния перемещения грузов и пассажиров отдельными экономическими районами. Морской транспорт, как правило, не связан непосредственно с пунктами отправления и назначения грузов. Скорость доставки грузов морским транспортом выше, чем железнодорожным, в 1,2 раза по сравнению с маршрутными отправками и в 1,5 раза – с повагонными. Основной задачей морского транспорта является сокращение времени доставки грузов и уменьшение расходов на перевозку.
Морской флот Украины, как и вся украинская экономика, в настоящий момент переживает кризис, однако он может и должен восстановить свои утраченные позиции на мировом фрахтовом рынке.
В условиях жесткой конкуренции между перевозчиками грузовладельцы и страховые компании отдадут предпочтение тем из них, которые могут обеспечить безопасность, сохранность и своевременность перевозки на должном уровне.
Современные суда оборудуются различными радионавигационными приборами, которые повышают безопасность в сложных в навигационном отношении условиях, однако даже на судах с высокой степенью технической оснащенности, часто судоводители работают в условиях острой нехватки времени.
В этих условиях остается актуальным вопрос предварительной навигационной подготовки судна к рейсу с целью повышения безопасности мореплавания.
1. Предварительная подготовка
1.1 Тактико-технические данные т/х «Пархоменко»
Навигационное оснащение судна Радиопеленгатор «Румб»
Общие сведения. Радиопеленгатор «Румб» — двухканальный визуальный радиопеленгатор с коммутацией каналов — предназначен для определения места судна по навигационным радиомаякам всех типов и для определения направлений на береговые радиостанции ненаправленного излучения, морские радиобуи и суда, ведущие радиопередачи.
Радиопеленгатор имеет следующие технические характеристики:
тип принимаемых сигналов — немодулированные колебания А1А; сигналы с амплитудной модуляцией тоном низкой частоты А2А; сигналы с амплитудной модуляцией звуковыми колебаниями АЗА;
диапазоны частот 250...545 кГц (1); 1600...3250 кГц (2);
относительная погрешность установки частоты настройки не хуже 0,2%;
чувствительность с рамочной антенной РА1, РА2 при длине фидера до 30 м в диапазоне 1 — не хуже 25 мкВ*м; в диапазоне 2 — не хуже 40 мкВ*м;
избирательность — по зеркальному каналу не менее 60 дБ; по каналам промежуточных частот не менее 80 дБ;
средняя квадратическая инструментальная погрешность радиопеленгования в дневное время при отношении сигнал/шум, равном 10, в диапазоне 1 — не более 1о; в диапазоне 2 — не более 3°;
мощность, потребляемая от сети переменного тока, не более 150 В*А.
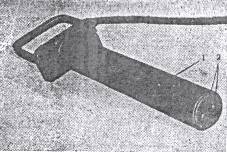
Радиопеленгатор «Румб» выпускается в различных комплектациях в зависимости от рода судовой электросети, типа рамочных антенн, длины фидеров, типа гирокомпаса. В комплект радиопеленгатора (рис. 1.2.1) входят:
приемоиндикаторный блок 1, блок питания 2, блок рамочных антенн 3 и не указанные на рисунке ненаправленная антенна типа «наклонный луч» и антенный усилитель или антенная коробка, сигнальный щиток. Радиопеленгатор снабжен устройством цифровой индикации частоты настройки, имеет двустороннюю световую сигнализацию между помещениями радиорубки, в которой установлен сигнальный щиток, и штурманской рубки для извещения о необходимости изолировать судовые антенны и подтверждения о том, что антенны изолированы.
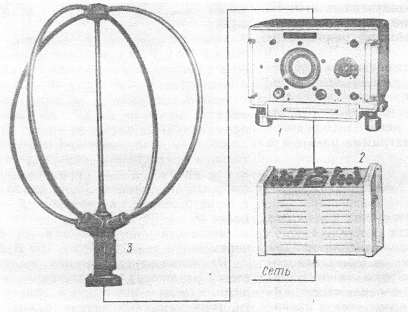
Рис Комплект радиопеленгатора
Индикаторный узел радиопеленгатора выполнен на ЭЛТ и обеспечивает отсчет радиокурсовых углов и радиопеленгов при точности не хуже 0,5°. Отсчет радиопеленгов производится при установке курса судна вручную или автоматически при наличии сельсинной связи с гирокомпасом.
Радиопеленгатор имеет встроенный отключаемый громкоговоритель, гнезда для подключения головных телефонов, устройства для компенсации коэффициентов А и D радиодевиации. Конструкция радиопеленгатора предусматривает возможность аварийного питания от аккумуляторов через электромашинный преобразователь ОП-120Ф.
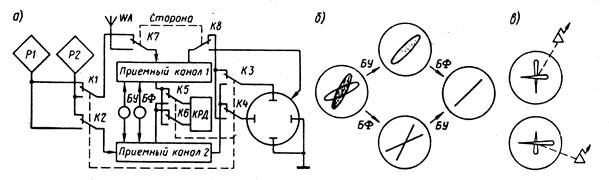
Устройство. Упрощенная функциональная схема радиопеленгатора «Румб» приведена на рис. 1.2.2,а. Радиопеленгатор снабжен входным (контакты К1, К2) и выходным (контакты K3, К4) коммутаторами, осуществляющими перекрестную коммутацию приемных каналов между рамочными антеннами и отклоняющими пластинами ЭЛТ.
В одном положении коммутирующих контактов сигнал от продольной рамки Р1 подается на вертикально отклоняющие пластины ЭЛТ через приемный канал 1, а сигнал от поперечной рамки поступает на горизонтально отклоняющие пластины через приемный канал 2. На экране ЭЛТ при неидентичных приемных каналах наблюдается эллипс. Во втором положении коммутирующих контактов сигнал от продольной рамки поступает на вертикально отклоняющие пластины ЭЛТ через приемный канал 2, а сигнал от поперечной рамки подается на горизонтально отклоняющие пластины через приемный канал 1. При этом на экране ЭЛТ создается эллипс, отличный от наблюдаемого в первом положении коммутирующих контактов. При коммутации с частотой 15...30 раз в секунду на экране ЭЛТ наблюдаются два эллипса, большие оси которых пересекаются под углом, характеризующим различие в усилении приемных каналов. Размеры малых осей эллипсов пропорциональны разности фазовых сдвигов в приемных каналах.
Балансировка приемных каналов производится регуляторами баланса усиления БУ и баланса фаз БФ в любой последовательности (рис. 1.2.2, б) до тех пор, пока на экране ЭЛТ не будет наблюдаться прямая линия, угол наклона которой к вертикали соответствует радиокурсовому углу на источник радиосигналов. Благодаря коммутации приемных каналов можно более быстро и точно сбалансировать каналы и контролировать их баланс во время пеленгования.
Для определения стороны расположения пеленгуемого источника радиосигналов нажимается кнопка «Сторона». При этом сигнал от ненаправленной антенны WA через приемный канал и контакты К7, К8 поступает на модулятор ЭЛТ. Через приемный канал и коммутирующие контакты К2 и КЗ, К4 сигналы от рамочных антенн поступают поочередно на свои отклоняющие пластины. На экране ЭЛТ изображается крестовидная фигура (рис 1.2.2, в), два конца которой подсвечиваются, а два другие затемняются в зависимости от фазовых соотношений сигналов рамочных антенн и ненаправленной антенны: Таким образом, яркими штрихами указывается квадрант, в котором расположена пеленгуемая радиостанция.
Для компенсации составляющей радиодевиации с коэффициентом D необходимо при коммутации каналов осуществлять изменение их усиления так, чтобы сохранялось постоянным отношение коэффициентов усиления сигналов от продольной и поперечной рамочной антенн
kпрод / kпопер = ( 1 – D ) / ( 1 + D )
Для этого в узле КРД имеются две установки усиления, которые с помощью контактов К5 и Кб подключаются к соответствующим приемным каналам при их коммутации.
Работа эхолота НЭЛ-МЗБ по функциональной электрической схеме
Навигационные эхолоты типа НЭЛ-М имеют несколько модификаций: НЭЛ-М 1, НЭЛ-М2, НЭЛ-МЗА, НЭЛ-МЗБ, НЭЛ-М4. Каждая модель предназначена для установки на судах определенного класса. Эхолот НЭЛ-МЗА устанавливается на судах класса река — море, эхолот НЭЛ-М4 — на речных судах. Модели эхолотов типа НЭЛ-М обладают высокой степенью унификации, имеют ряд общих приборов, выполненных на одинаковой элементной базе, и отличаются комплектацией и основными эксплуатационно-техническими характеристиками.
Навигационный эхолот НЭЛ-МЗБ предназначен для измерения глубин с помощью ультразвука, записи, цифровой индикации измеренных глубин и сигнализации при выходе судна на заданную глубину.
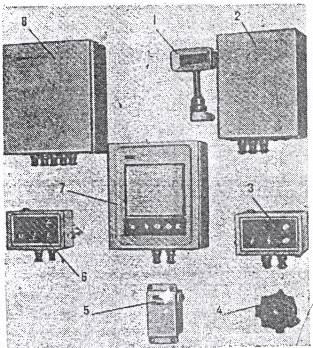
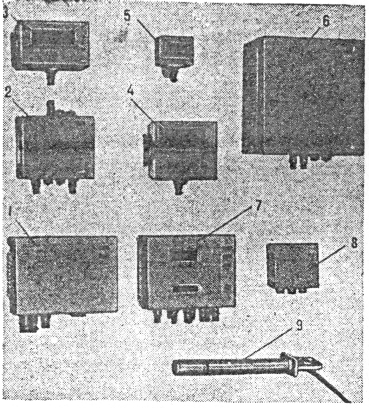
Рис. 1.2.3 Эхолот НЭЛ-МЗБ
Эхолот имеет следующие основные эксплуатационно-технические данные: диапазон измеряемых глубин 0,2-200 м; погрешности измерения глубин зависят от диапазона и составляют по самописцу от ±0,1 до ±3 м, по цифровому указателю глубин от ±0,1 до ±2 м, по прибору сигнализации глубин от +0,3 до ± 5 м; допустимая скорость судна 40 уз; допустимая килевая качка судна 2—3о, бортовая 10°; время готовности к работе 30 с; время непрерывной работы 60 ч; антенна пьезоэлектрического типа; расчетная скорость звука в воде 1500 м/с; питание эхолота от судовой сети однофазного тока напряжением 220/127 В, 50 Гц, от сети постоянного тока напряжением 220 В через преобразователь; потребляемая мощность от сети переменного тока 130 В*А, от сети постоянного тока 250 Вт.
В комплект эхолота (рис. 1.2.3) входят: антенна (прибор 1), самописец (прибор 4) 7, пульт управления цифрового указателя глубин ЦУГ (прибор 4Б) 3, прибор сигнализации глубин ПСГ (прибор 4Г) 6 с ревуном 4, цифровое табло (прибор 11) 1, приемопередающее устройство (прибор 16) 8, электронный узел ЦУГ (прибор 16А) 2, кабельная коробка (прибор Я), 5, ЗИП и техническая документация.
Рассмотрим принцип построения эхолота и его работы по функциональной электрической схеме (рис. 1.2.4). По характеру выполняемых задач электрическая схема эхолота НЭЛ-МЗА может быть условно разделена на следующие функциональные цепи: тракт формирования и посылки зондирующего импульса, тракт приема и усиления эхосигнала, тракт гашения и задержки нуля, тракт сигнализации заданной глубины, тракт управления работой двигателя, тракт преобразования времени и цифровой обработки измеренной глубины, схема контроля работы эхолота.
B тракт формирования и посылки зондирующего импульса входят: перо, контакты запуска КЗ и формирователь нулевой отметки ФНО прибора 4; генераторы автозапуска ГА приборов 4Б и 4Г схема ИЛИ и мультивибратор посылки МП блока посылок 1; генератор высокой частоты ГВЧ; коммутатор прием-передача КПП; прибор Я и антенна.
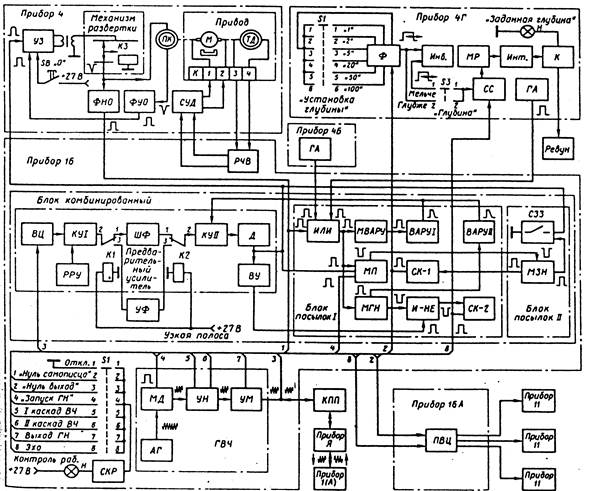
Рис. 1.2.4 Функциональная электрическая схема НЭЛ-МЗБ
При работающем самописце управление посылками осуществляется пером, контактом запуска КЗ и формирователем нулевой отметки, при отключенном самописце — генератором автозапуска прибора 4Б и при отключенных приборах 4 и 4Б — генератором автозапуска прибора 4Г. Импульс запуска в формирователе нулевой отметки задерживается на время, необходимое для прохождения пером расстояния от контакта запуска до нуля шкалы, и подается на схему ИЛИ блока посылок 1. На другие два входа схемы ИЛИ поступают импульсы запуска от генераторов автозапуска приборов 4Б и 4Г. С выхода схемы ИЛИ прямоугольные импульсы положительной полярности подаются на запуск мультивибратора посылки МП, мультивибратора гашения нуля МГН и мультивибратора временной автоматической регулировки усиления МВАРУ.
Мультивибратор посылки формирует прямоугольные импульсы посылки, длительность и частота следования которых зависят от поддиапазона измеряемых глубин и от включенного, для управления посылками прибора. Сформированные по длительности видеоимпульсы посылки подаются на модулятор МД генератора высокой частоты. На второй вход модулятора поступают высокочастотные гармонические колебания от автогенератора. После модулятора радио-импульсы усиливаются по напряжению и мощности и через коммутатор прием-передача подаются на антенну. В пьезоэлектрической антенне электрические колебания высокой частоты преобразуются в акустические колебания и излучаются в воду.
В тракт приема и усиления эхосигнала входят: антенна, прибор Я, коммутатор прием-передача, предварительный усилитель, усилитель записи УЗ, схемы ВАРУ.
Отраженный от дна акустический импульс принимается антенной и преобразуется в электрический сигнал. Электрический эхоимпульс во время пауз между зондирующими импульсами поступает через коммутатор прием-передача на вход предварительного усилителя. В предварительном усилителе эхосигнал усиливается двумя каскадами усиления КУ1 и КУ11, детектируется и подается в усилитель записи УЗ самописца, который обеспечивает усиления эхосигнала до значения, достаточного для прожига бумаги.
Защита приемоусилительного тракта от мощных зондирующих импульсов ГВЧ осуществляется коммутатором прием-передача. В КПП во время излучения импульсов шунтируется вход предварительного усилителя и на предварительный усилитель поступает ограниченный по интенсивности импульс. Этот радиоимпульс усиливается и поступает через детектор Д в усилитель записи самописца для записи «естественной» нулевой отметки.
Судовая радиолокационная станция «Наяда-5»
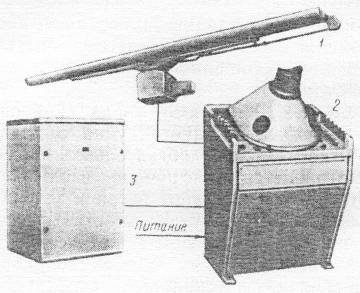
Рис. 1.2.5 Комплект РЛС «Наяда-5»
Судовая радиолокационная станция (РЛС) «Наяда-5» (рис 1.2.5) имеет следующие характеристики.
Длина волны 3,2 см (частота излучения 9430 МГц), поляризация волн горизонтальная.
Шкалы дальности: 1, 2, 4, 8, 16, 32, 64 мили. Индикация относительного движения возможна на всех шкалах дальности, индикация истинного движения - только на шкалах от 1 до 8 миль. Рабочий диаметр экрана индикатора 400 мм.
Импульсная мощность излучения не менее 12 кВт. Импульсная чувствительность приемоиндикаторного тракта на шкалах 1 и 2 мили — 120 дБ/Вт, на остальных шкалах—124 дБ/Вт.
Длительность (частота повторения) зондирующих импульсов: 0,07 мкс (3000 имп/с) —на шкалах 1 и 2 мили; 0,25 мкс (1500 имп/с) —на шкалах 4 и 8 миль; 0,7 мкс (750 имп/с) — на шкалах 16 и 32 мили и 0,7 мкс (500 имп/с)—на шкале 64 мили.
Ширина диаграммы направленности в горизонтальной плоскости — 0,7 град, в вертикальной плоскости — 20 град.
Максимальная дальность обнаружения при высоте установки антенны 20 м над уровнем моря и длине волновода 15 м (при вероятности 0,5): судна водоизмещением 5000 т—16... 17 миль, среднего морского буя — 3,5...4 мили.
Разрешающая способность по дальности на шкале 1 миля — не хуже 20...25 м; разрешающая способность по направлению — 0,9...1,2 град.
Максимальная инструментальная погрешность измерения расстояний на шкалах 1 и 2 мили — 50 м, на остальных шкалах — 1 % шкалы дальности. Максимальная инструментальная погрешность измерения направления электронным визиром 0,8 град.
Частота вращения антенны 14... 16 мин-1.
Погрешность индикации истинного движения по скорости ±5%, по курсу — ±2 град.
Время подготовки РЛС к работе 3...4 мин, среднее время безотказной работы 300 ч. Потребляемая мощность 2750 В*А.
Примечание. Все приведенные характеристики РЛС «Наяда-5» соответствуют также 3-сантиметровой РЛС включаемой в состав РЛС «Енисей-Р».
В РЛС возможна индикация относительного движения при ориентировке по курсу и меридиану или индикация истинного движения на шкалах от 1 до 8 миль при ориентировке по меридиану. В режиме относительного движения на шкалах от 1 до 8 миль возможно смещение центра развертки относительно центра экрана в любом направлении до ⅔ радиуса экрана. Индикаторы снабжены антипараллаксными зеркальными планшетами, что позволяет производить на их поверхности графические построения при решении задач на расхождение судов. Координаты объектов наблюдения измеряются с помощью электронного визира направления ЭВН и подвижного визира дальности ПВД с электронной цифровой индикацией, выведенной под тубусы индикаторов. РЛС сопрягается с гирокомпасами типа «Курс» или «Вега» и лагами типа МГЛ и ИЭЛ.
В РЛС обеспечивается помехозащита от морских волн и гидрометеоров посредством временной регулировки усиления приемника ВРУ и регулируемого дифференцирования видеосигналов (регулируемая МПВ). Имеются метки дальности МД, отметка курса ОК, автоматическая и ручная подстройка промежуточной частоты приемника АПЧ и РПЧ,
РЛС имеют блочную конструкцию и практически полностью выполнены на интегральных схемах и полупроводниковых приборах. Приборы И, П содержат встроенные системы контроля, позволяющие измерять питающие напряжения, проверять работоспособность узлов и блоков РЛС, настраивать гетеродин и систему АПЧ.
РЛС снабжена устройством контроля общей работоспособности (КОР) с дополнительной контрольной антенной, которая укреплена снаружи прибора А на кормовых курсовых углах и соединена кабелем с прибором П.
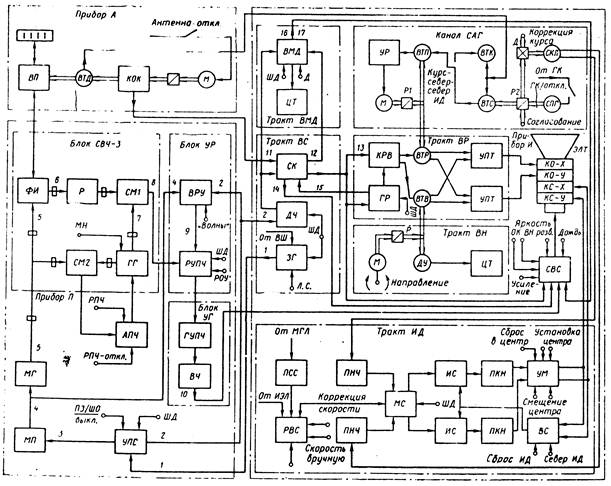
Рис. 1.2.6 Функциональная
Функциональная схема (рис. 1.2.6). Общие сведения. Функциональная схема включает в свой состав приборы (А, П, И); тракты, функционально объединяющие несколько блоков, субблоков и узлов (ВС, ВР, НМД, ВН, СВС, ИД); каналы, объединяющие несколько блоков, субблоков и узлов, но не выделяемые в таком виде в техдокументации РЛС (УПС, ПЧ, САГ); отдельные блоки (МП, СВЧ-3, АПЧ); важнейшие узлы (магнетронный генератор МГ, узел ЭЛТ).
В прибор П входят: канал управления передатчиком и синхронизации УПС, блок модулятора передатчика МП, магнетронный генератор МГ, блок СВЧ-3, канал промежуточной частоты—блоки УР (усилитель регулируемый) и УГ (усилитель главный).
Гирокомпас с косвенным управлением «Вега»
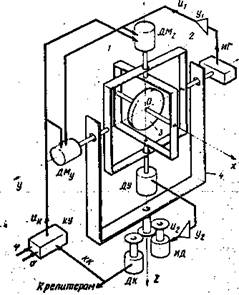
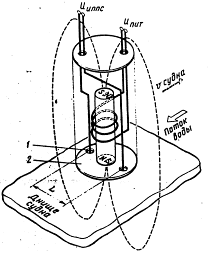
Рис. 1.2.7 Схема
На быстроходных судах и в авиации, где гирокомпас с пониженным центром тяжести чувствительного элемента имел бы недопустимо большие скоростные погрешности, применяются гирокомпасы с косвенным управлением. Принцип его работы заключается в следующем: уравновешенный гироскоп 3 (рис. 1.2.7) устанавливается в кардановом подвесе, состоящем из внутреннего вертикального кольца 1, внешнего вертикального кольца 2 и наружного вертикального полукольца 4. Карданов подвес обеспечивает гироскопу три степени свободы. Гироскоп вращается вокруг горизонтальной оси ОХ во внутреннем кардановом кольце. Внутреннее и внешнее кардановы кольца вместе с гироскопом, датчиком вертикального момента ДМz, датчиком угла ДУ, ротором датчика горизонтального момента ДМy и индикатором горизонта ИГ имеют возможность поворачиваться вокруг горизонтальной оси ОУ. Наружное полукольцо 4 может поворачиваться на любой угол относительно вертикальной оси OZ.
Если в момент включения гирокомпаса главная ось находилась в восточной половине плоскости горизонта, то под действием суточного вращения Земли она начнет видимым образом подниматься над плоскостью горизонта. Это будет замечено индикатором горизонта, который выработает сигнал, пропорциональный углу наклона главной оси. Этот сигнал усиливается усилителем У1 и подается на датчики вертикального и горизонтального моментов. Датчик горизонтального момента ДМy вызовет прецессию главной оси к западу, т.е. к плоскости меридиана, а датчик вертикального момента ДМz вызовет прецессию главной оси вниз, к плоскости горизонта. Через несколько полупериодов колебаний главная ось придет в точку динамического равновесия, которая с помощью корректирующего устройства КУ, вырабатывающего корректирующее напряжение uk, подаваемое на датчики вертикального и горизонтального моментов, может быть совмещена как с плоскостью меридиана, так и с плоскостью горизонта. Из сказанного вытекает, что датчик горизонтального момента с помощью индикатора горизонта выполняет ту же функцию, что и пониженный центр тяжести гиросферы, а датчик вертикального момента с помощью того же индикатора горизонта приводит к погашению колебаний, т.е. выполняет ту же функцию, что и гидравлический успокоитель гиросферы.
Датчик угла поворота внутреннего кольца карданова подвеса ДУ, усилитель У2 и исполнительный двигатель ИД образуют следящую систему, заставляющую наружное полу-кольцо 4 «следить» за поворотом внутреннего кольца 1 и поворачивать, кроме того, датчик курса ДК, подающий данные компасного курса к репитерам гирокомпаса и в корректирующее устройство КУ. Если в корректирующее устройство еще подать дополнительно информацию о широте плавания φ и скорости движения судна V, то корректирующее устройство способно выработать такие корректирующие напряжения, что гирокомпас станет невосприимчивым к скорости движения объекта (судна, самолета), (т. е. не будет иметь скоростной девиации.
Отечественная промышленность выпускает судовой гирокомпас с косвенным управлением «Вега», который может работать в режиме корректируемого гирокомпаса и в режиме гироазимута.
В режиме гироазимута разрывается электрическая цепь от индикатора горизонта к датчику горизонтального момента. Датчик вертикального момента с помощью индикатора горизонта будет удерживать главную ось в плоскости горизонта, а чтобы главная ось прецессировала вместе с меридианом (хотя она может быть отклонена на любой угол от меридиана), т. е. сохраняла неизменным свое направление в азимуте, на датчик горизонтального момента подается корректирующее напряжение, пропорциональное вертикальной составляющей угловой скорости суточного вращения Земли с учетом движения судна. Гироазимуткомпас «Вега» имеет следующие эксплуатационно-технические характеристики: точность показания ±0,8° в широтах до 70° и ±1,5° в диапазоне широт от 70 до 80°. При маневрировании в широтах до 70° точность показаний может снизиться до ±2,0°, а в широтах от 70 до 80° — до ±2,5°.
В условиях качки погрешность гирокомпаса не превышает ±1,5° в широтах до 70° и ±2,0° в широтах от 70 до 80°.
Гирокомпас не имеет девиации затухания и скоростной девиации при скорости хода до 70 уз.
Существенное уменьшение инерционных девиаций корректируемого гирокомпаса достигнуто увеличением периода собственных незатухающих колебаний чувствительного элемента до 150 мин и использованием индикатора горизонта с нелинейной характеристикой.
Точность показаний прибора в режиме гироазимута при скорости судна до 70 уз характеризуется дрейфом ±1,0 град/ч в широтах до 70° и ±1,5 град/ч в широтах от 70 до 80°.
Рабочая температура поддерживающей жидкости гироазимуткомпаса «Вега» составляет 73°С, поэтому гирокомпас не нуждается в принудительном охлаждении. Питается от судовой сети трехфазного переменного тока частотой 50 Гц напряжением 220 или 380 В через агрегат питания АМГ-202. Чувствительный элемент гирокомпаса питается переменным трехфазным током частотой 500 Гц напряжением 40 В.
Гироазимуткомпас имеет устройство ускоренного приведения в меридиан. Время приведения в меридиан в этом случае 60 мин.
В состав комплекта гироазимуткомпаса «Вега» входят следующие приборы.
Прибор ВГ-1А — основной прибор. В нем размещены трехстепенный поплавковый чувствительный элемент с жидкостно-торсионным подвесом, двухканальная. следящая система, двухканальная система косвенного управления, система терморегулирования.
Технико-эксплуатационные данные лага ИЭЛ-2М
Лаг ИЭЛ-2М предназначен для измерения относительной скорости судна от 0 до 34 уз и пройденного судном расстояния.
Лаг рассчитан на работу при температуре заборной воды от -4 до +36° С и ее солености от 0,1 до 38 °/оо; при температуре в помещениях, где установлены приборы 29, б и 3, от -10 до +50° С; при вибрациях c ускорением свободного падения до 2g с частотами до 120 Гц.
Инструментальные погрешности лага по скорости не превышают ±0,l уз при температуре от 15 до 35°С; ±0,2 уз при температурах от 0 до 15°С и от 35 до 50°С; ±0,35 уз при температуре от -10 до 0°С. Остаточные погрешности лага при скорости движения судна до 10 уз не должны превышать ±0,15 уз, а при скорости от 10 до 20 уз ±0,2 уз. При движении судна в воде соленостью менее 2 °/оо допускается увеличение остаточной погрешности на 0,1 уз.
Погрешность лага по пройденному расстоянию
ΔSл = ± ( Sл * ΔVл/Vo + Sл * 10-4 + 0,002 ),
где Sл — пройденное расстояние по лагу, мили;
ΔVл — остаточная погрешность лага, уз;
Vo — эталонная скорость, уз;
10-4 — стабильность генератора опорной частоты;
0,002 — дискретность импульсов узла выработки пройденного расстояния, мили.
Корректирующее устройство лага позволяет вводить поправки: постоянную до 1,5 уз; переменную, линейно зависящую от скорости до 15 % и переменную, нелинейно зависящую от скорости с крутизной характеристики до 0,1 и числом перегибов не более одного во всём диапазоне скоростей.
Индикация скорости осуществляется на трехразрядном цифровом табло с точностью до 0,1 уз, а индикация пройденного расстояния — на механическом счетчике емкостью 9999,9 мили (с последующим повторением цикла) с точностью до 0,02 мили.
Для контроля точности работы измерительной схемы лага и поиска неисправностей в лаге предусмотрены внутренний тест и схема поиска неисправного блока.
Лаг снабжен также устройством ручного ввода скорости, используемым при неисправном датчике или приборе 29.
Питание лага осуществляется от судовой сети переменного однофазного тока напряжением 110, 127 или 220 В частотой 50 Гц. Допускаются длительные отклонения напряжения до ±10 % и частоты до ± 5 %. Потребляемая мощность основного комплекта приборов лага не превышает 170 ВА, а полная определяется количеством и типом подключенных периферийных приборов.
Ресурс лага при нормальной эксплуатации 50 000 ч, срок службы 15 лет.
В комплект лага входят следующие приборы (рис. 1.2.11): индукционный первичный преобразователь скорости 9 (ИППС) (прибор 9Д) с динамическим клинкетом (прибор 11), согласующий прибор 8 (прибор 29), центральный прибор 7 (прибор 6), прибор питания 1 (прибор 3).
Дополнительно могут быть поставлены: указатели скорости 3 и 5 (приборы 1, 1А соответственно), указатели скорости и пройденного расстояния 4 (приборы 5), размножитель информации 2 (прибор 59), приборы связи 6 (приборы 119А-1 или 119Э).
Кроме того, в комплект лага входят эксплуатационная документация, одиночный ЗИП и кабельные части для межприборного монтажа.
Приёмоиндикатор GPS «FURUNO»
В комплект приёмоиндикатора (рис. 1.2.12) входят: основной блок (прибор 2) без установочных кронштейнов 434X 170Х 372 мм, антенное устройство (прибор 1), выпрямитель (прибор 3). Электропитание индикатора осуществляется от сети постоянного тока 10 –42 В при потребляемой мощности не более 40 Вт или от сети переменного тока 50/60/70 Гц, 100/110/120 В через выпрямитель.
Приёмоиндикатор обладает следующими характеристиками: точность определения места судна не хуже 0,5 мили плюс 0,2 мили на каждый узел погрешности ввода данных скорости судна; частота принимаемых сигналов 399, 968 МГц (400 МГц); чувствительность приёмного устройства 146 дБ; коэффициент усиления системы 30дБ 146 дБ. Все полученные данные индицируются на экране. Оперативное управление при бором производится с помощью квазисенсорной клавиатуры, требующей легкого нажатия, которое дублируется звуковым сигналом.
Приемоиндикатор сопрягается с гирокомпасами и лагами различных типов, с приемоиндикаторами РНС «Лоран-С» или «Омега».
К приемоиндикатору могут быть также подключены: выносной телевизионный индикатор, печатающее устройство, автопрокладчик и некоторые другие приборы.
Приемоиндикатор имеет следующие функциональные возможности.
1.Автоматическое определение места судна по сигналам навигационных спутников независимо от выполнения прибором остальных функций.
2.Счисление пути судна между спутниковыми обсервациями за счет связи с лагом и гирокомпасом или в режиме ручного ввода курса и скорости.
3.Учет в счислении суммарного сноса, рассчитанного по результатам двух предыдущих обсерваций.
4.Непрерывное определение места судна по сигналам РНС «Лоран-C» или «Омега» при сопряжении с соответствующими приемоиндикаторами.
5. Выдача данных по пяти последним выполненным обсервациям.
6. Расчет времени появления и максимальной угловой высоты последующих навигационных спутников.
7. Расчет ортодромических или локсодромических расстояний и пеленгов, а также времени движения в любую из девяти заданных точек.
8. Расчет плавания по ортодромии с аппроксимацией последней несколькими отрезками локсодромии.
9. Звуковая сигнализация о прибытии в окрестность заданной точки или о выходе из коридора установленной ширины при движении в эту точку.
10.Запоминание девяти событий (время, координаты) по команде судоводителя.
11.Расчет расхода топлива при сопряжении с импульсными расходомерами.
12.Ведение графической прокладки пути судна на экране приемоиндикатора.
13.Контроль за принимаемыми сигналами спутника.
14.Периодическая самопроверка работоспособности всех узлов приемоиндикатора или контрольная проверка по команде оператора с индикацией результатов на экране индикатора.
Приемоиндикатор имеет встроенную аккумуляторную батарею, которая обеспечивает питание определенного участка оперативной памяти при выключении прибора или при обесточивании судовой сети. Это позволяет сохранить в памяти прибора основные данные и не вводить их снова при повторном включении. Исключение составляют счислимые координаты, которые надо ввести вновь, если они изменились более чем на 60 миль. Срок службы батареи 5 лет.
1.2 Подготовка технических средств навигации
При подготовке технических средств навигации, необходимо ознакомится с оборудованием мостика: сигнализацией, освещением, органами управления для освещения палубы и наружного освещения. Включить и проверить в работе радиопеленгатор, эхолот, электронные средства определения места судна, аварийные средства на случай выхода из строя главного источника энергии, оборудование для наблюдения за опасностями, гирокомпас и репитеры согласовать, радиолокационные станции согласовать с гирокомпасом (ГК), ГК сверить с магнитным компасом. Проверить исправность сигнально-отличительных огней, включая аварийные ходовые огни, огонь «не могу управляться» и другие. Оборудование обеспечивающее безопасность (например, пиротехнические средства) должно быть в наличии. Включить счётчик скорости и пройденного расстояния. Проверить рулевой привод, включая ручной, авторулевой и средства аварийного переключения, машинный телеграф, включая органы управления главными двигателями (если нужно) и водонепроницаемыми дверями. Ознакомится с расположением карт, гидрографических пособий, биноклей, сигнальных флагов, метеорологического оборудования, телефонов и их исправность. Включить комплекс GMDSS. Проверить средства связи: внутренние, внешние и переносные. Стеклоочистители должны быть проверены. Проверить точность хода часов и хронометр.
Звуковые средства сигнализации тифоны, свистки (но не при плохой видимости или когда вблизи другие суда). Проверить работу отмашек, ратьера, прожекторов. Включают НАВТЕКС и GPS.
Судовые технические средства навигации должны быть подготовлены к работе до выхода судна в море в соответствии с инструкциями по их эксплуатации. Прибор считается в рабочем состоянии, если его параметры соответствуют условиям завода-изготовителя и определены поправки.
Обязанности помощника капитана, на которого возложено обслуживание технических средств судовождения, определены РШС и Правилами технической эксплуатации судовой электрорадионавигационной аппаратуры.
Технические средства судовождения на данном этапе закреплены за электронавигатором, который должен перед выходом судна в море обеспечить подготовку всех приборов к работе и доложить о готовности старшему помощнику капитана.
Общие требования к подготовке средств навигации следующие:
Секстан должен быть всегда в рабочем состоянии. При подготовке к плаванию проверяют комплектность секстана, протирают оптику, производят выверки.
Хронометр. Поправка хронометра определяется ежесуточно по возможности в одно и то же время суток с точностью до 0,2с.
Секундомер. Ход секундомера проверяется по хронометру. Секундомер пригоден к работе, если его ход не более 1с/ч
Часы и лента реверсографа согласовываются один раз в сутки. Допустимо расхождение 20с.
Магнитный компас - проверяют свободное вращение пеленгатора, правильную установку его призмы и нитей, годность таблицы девиации, соответствие записанных и фактических положений магнитов девиационного прибора. Девиация магнитного компаса уничтожается по необходимости, как правило, не реже одного раза в год. Остаточная девиация у главного магнитного компаса не должна превышать 3о, а путевого – 5о. при перевозке ферромагнитных грузов допускается использование временной таблицы девиации.
Гирокомпас готовят согласно Правилам технической эксплуатации и соответствующей инструкции. Запускают его заблаговременно, не позже, чем за 6 часов до отхода судна. Постоянная поправка гирокомпаса определяется: после длительной стоянки судна, смены гиросферы или поддерживающей жидкости в основном приборе, ремонта периферийных приборов; когда выявлено изменение поправки; периодически во время плавания судна. Расхождение времени по курсограмме и судовым часам не должно превышать 10мин. (одного деления на курсограмме) за вахту.
Лаг готовят к работе в соответствии с инструкцией по эксплуатации. Проводят осмотр, пробное включение электросхемы, установку нуля, проверяют соответствие установки корректора, записав в формуляре и наличие таблицы поправок у репитеров. Поправка лага определяется с точ