


Многочастотные РЛС
Введение
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно-техническое направление в радиотехнике зародилась в 30-х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС) или радиолокаторами; а наблюдаемые объекты — радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения и т. п.
Системы радиолокации практически всегда входит в состав более сложных суперсистем. Эти суперсистемы имеют важное военное и народнохозяйственное значение и находят разнообразное применение: для управления воздушным движением, в навигации самолетов, кораблей, в геофизических и астрофизических исследованиях и др.
Системы радиолокации составляют информационную часть таких суперсистем и функционируют совместно и во взаимной связи с другими подсистемами суперсистемы (радионавигации, радиоуправления, передачи информации).
1. Формирование многочастотного сигнала
Многочастотный сигнал представляет собой совокупность нескольких сигналов с различными несущими частотами и одинаковыми или разными законами модуляции.
Принципиально возможно формирование многочастотного сигнала излучением нескольких сигналов с различными несущими частотами одновременно или со смещением во времени за счет быстрой перестройки несущей частоты зондирующего сигнала по определенному закону.
Одновременное излучение сигналов с различными несущими частотами может быть осуществлено несколькими способами. Наиболее простым из них является способ, при котором многочастотный сигнал формируется группой передатчиков с различными несущими частотами. В таких многочастотных РЛС непрерывного излучения, как правило, каждый передатчик работает на отдельную передающую антенну, а каждый приемник подключен соответственно к отдельной приемной антенне. Такая схема передающего тракта характерна для многочастотных РЛС непрерывного излучения, например доплеровских РЛС обнаружения низколетящих целей.
Одновременное излучение сигналов с различными несущими частотами может быть обеспечено при использовании в передающем устройстве в качестве задающего генератора многочастотного автогенератора.
Различают три основных типа многочастотных автогенераторов: с использованием гармоник основной частоты; с произвольным соотношением собственных частот контуров; с запаздывающей обратной связью. Кроме этого, возможны многочастотные автогенераторы, представляющие собой различные комбинации указанных выше основных типов.
Особый интерес с точки зрения использования многочастотных сигналов в радиолокации представляет третий тип многочастотных автогенераторов — с запаздывающей обратной связью, генерирующих колебания со спектром частот вокруг основной частоты.
В дециметровом и сантиметровом диапазонах волн такие многочастотные автогенераторы могут быть созданы на лампах бегущей или обратной волны с внутренней (через замедляющую систему) или внешней обратной связью.
Для получения устойчивых гармонических колебаний в любом автогенераторе должны выполняться условия баланса амплитуд и фаз. Применительно к лампам бегущей волны (ЛБВ) с внутренней обратной связью условие баланса амплитуд состоит в том, что существующие в стационарном режиме колебания должны компенсировать потери энергии в нагрузке и в замедляющей системе, а условие баланса фаз — в том, что для частот генерируемых колебаний в замкнутой цепи прямой и обратной связи должно укладываться целое число волн.
В математической форме это условие может быть представлено соотношением
![]()
где vП — фазовая скорость прямой волны; v0 — фазовая скорость отраженной волны; w — частота генерируемых колебаний; L — суммарная эквивалентная длина коаксиальных переходов на входе и выходе ЛБВ; l —длина спирали замедляющей системы.
Из соотношения ( 1) видно, что в ЛБВ с внутренней обратной связью принципиально существуют условия для одновременной генерации колебаний нескольких частот.
Многочастотность ЛБВ с внутренней обратной связью может быть пояснена также графически (рис. 7) путем сопоставления зависимости условия баланса фаз от частоты генерируемых колебаний с дисперсионной характеристикой замедляющей системы ЛБВ — v(w). Учитывая, что фазовые скорости прямой и отраженной волн практически одинаковы (vП = v0 = v) и намного меньше скорости света, а эквивалентная длина коаксиальных переходов на входе и выходе ЛБВ незначительна по сравнению с длиной спирали замедляющей системы (L << l ), зависимость условия баланса фаз от частоты генерируемых колебаний для разных п с достаточной степенью точности графически может быть представлена наклонными прямыми
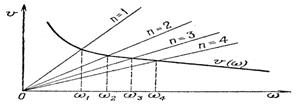
Рис. 7. Дисперсионная характеристика ЛБВ с внутренней ОС
Еще одним из способов одновременного формирования сигналов с различными несущими частотами может являться синтезирование частот. В многочастотных передающих устройствах находит применение пассивный метод синтезирования частот, основанный на использовании только генераторов гармоник, смесителей и фильтров.
Реализация любого из рассмотренных выше способов одновременного формирования многочастотного сигнала сопряжена с рядом особенностей, связанных с усложнением схемы передающего тракта, исключением взаимного влияния сигналов различных частот, одновременным усилением сигналов в широком диапазоне частот, увеличением габаритов и веса РЛС.
Следует также иметь в виду, что при наличии в тракте передачи элементов, общих для сигналов всех частот, одновременное формирование многочастотного сигнала оказывается энергетически невыгодным, так как мощность каждого из составляющих сигналов в среднем не может быть больше величины отношения предельно допустимой передаваемой мощности к числу несущих частот.
2. Многочастотная радиолокация целей
Отрицательное влияние флюктуации отраженных сигналов на характеристики РЛС может быть устранено или, по крайней мере, уменьшено, если удастся каким-либо образом добиться их сглаживания. Одним из способов сглаживания флюктуации является применение многочастотных сигналов. Физическая сущность эффекта сглаживания флюктуации отраженного сигнала при облучении цели многочастотным сигналом состоит в том, что при достаточно большом разносе несущих частот ширина лепестков диаграмм вторичного излучения цели на различных частотах неодинакова, а соответствующие экстремальные точки диаграмм оказываются сдвинутыми друг относительно друга, благодаря чему уменьшается изрезанность эквивалентной диаграммы вторичного излучения цели и соответственно относительная величина флюктуации отраженного сигнала. При этом наибольший эффект сглаживания флюктуации достигается при статистической независимости отраженных от цели сигналов на каждой из составляющих частот (3).
При многочастотном сигнале уже недостаточно рассматривать функции автокорреляции каждой из его частотных составляющих, а необходимо ввести также функцию их взаимной корреляции

Необходимым (но не достаточным) условием независимости отраженных сигналов является ортогональность соответствующих составляющих зондирующего сигнала (4). Из ( 2) видно, что эта ортогональность не может быть обеспечена подбором законов модуляции, так как преобразование Фурье функции Сjk(t,wj-wk+Wjk) является произведением спектров модуляции j-го и k-го сигналов, один из которых сдвинут по частоте на величину wj-wk+Wjk, так что требуемое равенство нулю этой функции при j¹k достигается лишь при неперекрывании указанных спектров, т. е. При достаточно большой величине ½wj-wk ½.
Функцию корреляции при многочастотном излучении можно преобразовать к виду

где r(t1-t2) – коэффициент флюктуаций; wдj – доплеровский сдвиг j-й несущей частоты; Аj – амплитуда j-го отраженного сигнала; rjk - оределяет степень коррелированности j–го и k–го сигналов.
Известно, что частота корреляции сигналов, отраженных от одной и той же цели, зависит от скорости распространения электромагнитной энергии и радиальной протяженности цели. При этом под радиальной протяженностью цели понимается: для точечных целей — разрешающая способность РЛС по дальности, а для протяженных целей — непосредственно радиальные размеры их. Радиолокационные сигналы цели могут считаться некоррелированными, если разность фаз составляющих многочастотного сигнала, отраженных от крайних точек цели, измеренная относительно ее центра, составляет не менее 2p:
![]()
где Djj=2plцрfj/с - сдвиг фазы сигнала на частоте fj многочастотного сигнала относительно фазы сигнала от отражающего центра цели; lцр — радиальная протяженность цели. Подставив значение Djj и Djj-1, в выражение ( 3), найдем величину необходимого разноса частот
Таким образом, необходимым условием независимости отраженных от одной и той же цели сигналов является обеспечение необходимого разноса их частот, величина которого зависит от радиальной протяженности цели.
Более строго условие независимости отраженных сигналов формулируется следующим образом: отраженные сигналы являются статистически независимыми, если длина волны, соответствующая разностной частоте, мала по сравнению с радиальной протяженностью цели и если отсутствует взаимное перекрывание спектров модуляции сигналов различных частот.
Для статистически независимых сигналов логарифм отношения правдоподобия равен сумме логарифмов отношении правдоподобия для отдельных сигналов. В соответствии с этим схема оптимальной обработки многочастотного сигнала представляет собой совокупность схем для отдельных сигналов. Напряжения на выходах этих схем суммируются и сравниваются с поротом.
Можно показать (4), что для случая медленных флюктуаций и обработки сигнала оптимальным образом, характеристическая функция определяется равенством
где т — число используемых частот.
При q0j=0 этой характеристической функции соответствует хи-квадрат распределение с 2т степенями свободы. Наибольший интерес представляет вопрос о выборе числа частотных каналов, обеспечивающего максимальную дальность обнаружения при заданной общей мощности излучения. Считая, что мощность распределяется между каналами поровну (q01=q02=…=q0/m) уравнение характеристик обнаружения можно представить в виде
График зависимости q0(m) приведен на рис. 8. Эта зависимость порогового отношения сигнал/шум от числа статистически независимых компонент сигнала, квадратично суммируемых в процессе обработки.
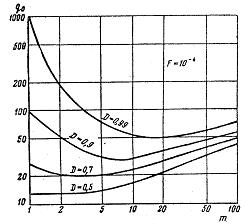
Рис. 8. Зависимость порогового отношения сигнал шум от числа используемых несущих частот
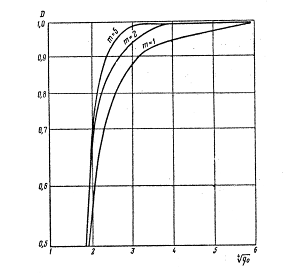
Рис. 9. Зависимость вероятности правильного обнаружения от дальности
Как видно из рисунка, кривые q0(m) при D>0,5 имеют минимум при m=mопт(D), глубина которого увеличивается с увеличением вероятности правильного обнаружения. Соответственно увеличивается и выигрыш в пороговом отношении сигнал/шум (а следовательно, и в дальности обнаружения) при фиксированном числе частотных каналов по сравнению со случаем одночастотной работы. Вследствие этого при многочастотной работе при m
Интересно отметить, что кривая зависимости q0(m) весьма быстро спадает при малых т. Благодаря этому выигрыш, близкий к максимальному, можно получить при сравнительно небольшом числе рабочих частот (2 – 4).
При быстрых флюктуациях отраженного от цели сигнала, равномерном распределении мощности между частотными каналами и одинаковых спектрах флюктуаций на различных частотах увеличение числа каналов эквивалентно увеличению в т раз времени наблюдения при одновременном уменьшении отношения сигнал/шум. В частности, для прямоугольной спектральной плотности флюктуаций (4), можно получить
Последнее равенство справедливо при mDfcT >> 1. Из ( 5) видно, что при быстрых флюктуациях отраженного сигнала пороговое отношение сигнал/шум увеличивается с увеличением числа частотных каналов примерно как Öт. Качественно это объясняется тем, что в этом случае уже имеется достаточное число (порядка DfcT) статистически независимых компонент сигнала и дальнейшее дробление мощности между этими компонентами снижает эффективность когерентного накопления сигнала.
Таким образом, при быстрых флюктуациях отраженного сигнала (mDfcT >> 1) использование многочастотной работы с точки зрения требования увеличения дальности действия радиолокатора является нецелесообразным.
радиолокация многочастотный сигнал
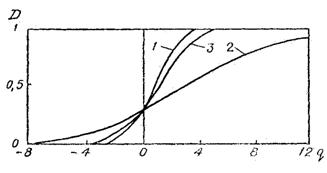
Рис. 10. Зависимость вероятности обнаружения цели от отношения сигнал шум
Сглаживание флюктуаций отраженных сигналов при многочастотном зондирующем сигнале позволяет приблизить характеристики обнаружения флюктуирующих целей к характеристикам обнаружения идеальной нефлюктуирующей цели. На рис. 10 изображены зависимости вероятности обнаружения цели от отношения сигнал/шум для двух типов целей — идеальной нефлюктуирующей (кривая 1) и флюктуирующей при одночастотном (кривая 2) и многочастотном (кривая 3) облучениях. Всем трем случаям соответствует равная вероятность ложной тревоги (F = 2·10-5) и одинаковое число импульсов, принимаемых за один цикл обзора (N = 20).
Сравнивая кривые 1 и 3, можно заключить, что при многочастотной работе РЛС вероятность обнаружения флюктуирующих целей практически не отличается от вероятности обнаружения нефлюктуирующих целей (максимальные отклонения имеются при очень больших и очень малых вероятностях обнаружения цели и при этом не превышают 1,5 – 2 дБ).
Из сопоставления кривых 2 и 3 видно, что преимущества многочастотной работы реализуются в области больших вероятностей обнаружения целей (более 0,3). Так, например, в случае многочастотной работы РЛС при отношении сигнал/шум, равном 5 дБ, обеспечивается практически 100 % вероятность обнаружения флюктуирующих целей, тогда как при этих же условиях вероятность обнаружения целей обычной одночастотной РЛС составляет менее 70 %. При заданной вероятности обнаружения целей многочастотная РЛС способна обеспечить намного большую дальность действия, чем соответствующая ей одночастотная РЛС при той же мощности излучения.
Выигрыш в отношении сигнал/шум, равный 7,5 дБ (2), равнозначен увеличению мощности РЛС примерно в шесть раз, в результате чего дальность действия ее будет в 1,5 раза превосходить дальность действия соответствующей одночастотной РЛС.
В области малых вероятностей обнаружения целей многочастотная работа РЛС не имеет преимуществ, так как случайное появление в пачке отраженных сигналов отдельных импульсов, превышающих порог, более вероятно при одночастотном облучении флюктуирующей цели.
3. Способы обработки многочастотных сигналов
Как уже говорилось, оптимальное приемное устройство многочастотной РЛС состоит из совокупности параллельных частотных каналов, общего сумматора и порогового устройства. Суммирование выходных сигналов частотных каналов принципиально может быть осуществлено на высокой, промежуточной или низкой (видео) частоте.
Первые два способа объединения частотных каналов, но их реализация представляет довольно сложную проблему. Способ объединения частотных каналов на видеочастоте, несколько уступая двум другим способам в пороговом отношении сигнал/шум, обладает по сравнению с ними такими важными преимуществами, как отсутствие необходимости обеспечения когерентности радиолокационной системы и независимость характеристик приемного устройства от величины доплеровских сдвигов частот принимаемых сигналов.
В зависимости от числа рабочих частот РЛС принципиально возможны несколько способов объединения сигналов частотных каналов приемного устройства: линейное суммирование амплитуд сигналов всех каналов перемножение амплитуд сигналов всех каналов; линейное суммирование амплитуд сигналов нескольких каналов в отдельных сумматорах с последующим перемножением результатов суммирования; перемножение амплитуд сигналов нескольких каналов в отдельных умножителях с последующим суммированием результатов перемножения (2).
Первые два способа применимы при любом числе рабочих частот РЛС, тогда как последние два способа могут использоваться только при числе частот не менее трех. Наиболее распространенным способом сложения частотных составляющих многочастотного сигнала является линейное суммирование их амплитуд, обеспечивающее наибольшую вероятность обнаружения цели:

где Uc - амплитуда результирующего сигнала на выходе сумматора; Ur амплитуда сигнала в r-ом канале; L - число рабочих частот.
Для принятия решения о наличии цели при этом способе сложения сигналов достаточно превышения порога сигналом хотя бы одного из частотных каналов приемника.
Если приемное устройство состоит из L частотных каналов, то вероятность одновременного превышения порога n каналов равна
где DLn - вероятность одновременного превышения порога сигналами n из L каналов; D0 - вероятность обнаружения цели отдельным каналом; (1-D0) - вероятность пропуска цели отдельным каналом; количество возможных комбинаций каналов, сигналы которых одновременно превышают порог

Поскольку при линейном суммировании сигналов частотных каналов необходимым и достаточным условием правильного обнаружения цели является превышение порога сигналом хотя бы одного из каналов, то полная вероятность обнаружения цели многочастотной РЛС будет равна сумме вероятностей превышения порога сигналами одного, двух, трех и т. д. и, наконец, всех каналов приемника
![]()
С помощью аналогичных рассуждений можно найти зависимость полной ложной тревоги в многоканальном приемнике от вероятности ложной тревоги в отдельном канале при линейном суммировании сигналов
или, учитывая, что F0<<1:
F0 @ LF0 .
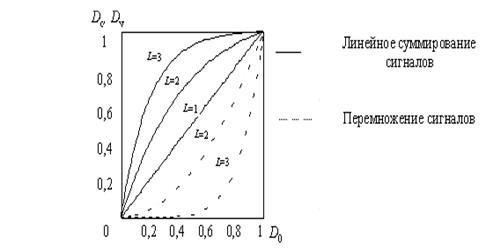
На рис. 11 графически изображена зависимость вероятности обнаружения цели в многоканальном приемнике с линейным суммированием сигналов от вероятности обнаружения цели в отдельном канале при различном числе каналов. Из сравнения графиков зависимости Dc=f(D0) при различных значениях L можно заключить, что вероятность обнаружения цели при линейном суммировании сигналов тем выше, чем больше число частотных каналов приемника. Однако не следует забывать, что увеличение числа каналов связано с повышением также и ложной тревоги. Чтобы сохранить вероятность ложной тревоги в многоканальном приемнике такой же, как в отдельном канале, необходимо увеличить порог, что, естественно, приведет к снижению вероятности обнаружения цели.
При объединении сигналов частотных каналов приемника путем перемножения их амплитуд результирующий сигнал на выходе общего умножителя имеет вид
![]()
где U1, U2,…, UL - амплитуды сигналов в соответствующих каналах приемника.
Необходимым условием правильного обнаружения цели в многоканальном приемнике с перемножением сигналов является превышение порога сигналами всех каналов. Очевидно, при этом вероятность обнаружения будет определятся формулой
![]()
![]() а вероятность ложной тревоги
а вероятность ложной тревоги
Таким образом, в многоканальном приемнике с перемножением сигналов вероятность обнаружения цели так же, как и вероятность ложной тревоги, тем выше, чем меньше число каналов приемника (рис. 11).
Способы объединения сигналов суммированием с последующим перемножением сумм и перемножением с последующим суммированием произведений представляют собой комбинации рассмотренных способов обработки многочастотного сигнала - линейного суммирования и перемножения сигналов.
4. Многочастотные РЛС
Находят применение два пути использования в станциях многочастотного излучения. Во-первых, можно осуществлять излучение на нескольких частотах в пределах одной и той же диаграммы направленности. При этом цель одновременно облучается радиоволнами на всех рабочих частотах. Станции, в которых реализован этот принцип, можно называть частотно-многоканальными, так как их основные показатели определяются совокупностью действия всех частотных каналов.
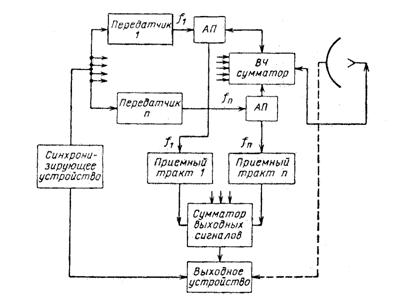
Рис. 1 Функциональная схема частотно - многоканальной РЛC
Второй путь использования нескольких частот излучения состоит в том, что на каждой частоте создается самостоятельная диаграмма направленности, смещенная относительно других в пространстве. Точечная цель в каждый данный момент находится в пределах одной из диаграмм (изредка — на стыке двух диаграмм) и облучается радиоволнами одной частоты. Радиолокационные станции, в которых используется этот принцип, не являются по сути дела многоканальными: они представляют собой как бы комбинацию нескольких независимых устройств, работающих на нескольких частотах.
В РЛС первого типа имеется несколько передатчиков, работающих на различных частотах f1, f2, . . ., fn и запускаемых общим синхронизирующим устройством (рис. 12). Высокочастотные колебания поступают в волноводный сумматор и затем подводятся к облучателю зеркала антенны. Таким образом создается один луч, в пределах которого излучаются радиоволны различной длины. Принятые сигналы от антенны поступают к п приемникам, предназначенным для раздельной обработки сигналов на разных частотах.
Выходные сигналы приемников подводятся к сумматору, где производится их совместная обработка; импульсы напряжения, образующиеся в результате этой дополнительной обработки, фиксируются на индикаторе или в другом выходном устройстве.
5. Помехозащищенность многочастотных РЛС
Одно из главных достоинств многочастотных РЛС — это их высокая помехозащищенность, что обусловлено, прежде всего, высокой помехоустойчивостью самого метода многочастотной радиолокации, а также применением специальных способов совместной обработки сигналов с разными несущими частотами, возможностями перераспределения излучаемой энергии между различными частотными каналами, выигрышем в пороговом отношении сигнал/шум. Определяющим из перечисленных факторов, безусловно, является помехоустойчивость метода многочастотной радиолокации, как следствие использования радиолокационных сигналов, занимающих достаточно широкий диапазон частот.
Эффективного подавления многочастотной РЛС можно добиться только путем постановки достаточно интенсивных узкополосных помех на каждой ее рабочей частоте. Это означает, что для противодействия многочастотной РЛС требуется в m раз больше передатчиков помех, чем для подавления одночастотной РЛС того же типа. В реальных условиях из - за отсутствия достоверной информации о технических характеристиках подавляемой РЛС можно ожидать, что одновременное воздействие узкополосных помех будет иметь место только на отдельных частотах многочастотной РЛС.
Если воздействие интенсивной помехи на любе рабочих частот РЛС расценивать как прекращение приема полезной информации по соответствующему частотному каналу РЛС из-за его выключения, то эффективность воздействия помехи на многочастотную РЛС можно характеризовать степенью ухудшения характеристик обнаружения РЛС в результате уменьшения числа ее рабочих частот (2). Рис. 13 иллюстрирует характер и степень изменения дальности действия десятичастотной РЛС от числа подавленных помехой рабочих частот (mn) при различных вероятностях обнаружения целей. Графики зависимости построены для двух режимов работы РЛС — с перестройкой частоты от импульса к импульсу (сплошные линии) и с одновременным излучением частот (пунктирные линии).
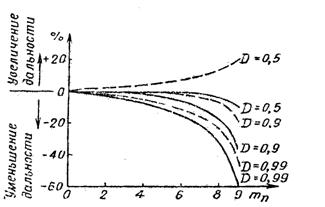
Рис. 13 Зависимость дальности действия десятичастотной РЛС от числа подавленных помехой рабочих частот
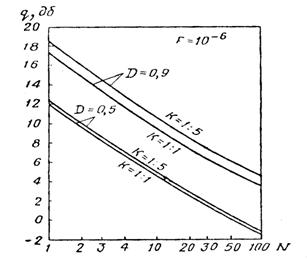
Рис. 14. Зависимости порогового отношения сигнал/шум в двухчастотной РЛС от числа импульсов N
Изменение соотношения между числом импульсов, излучаемых на различных несущих частотах, практически не снижает эффекта многочастотной работы РЛС. Пороговое отношение сигнал/шум при неизменном числе принимаемых за цикл обзора импульсов изменяется весьма незначительно. Это видно из графиков зависимости порогового отношения сигнал/шум (q) в двухчастотной РЛС от числа импульсов N, принимаемых в каждом цикле обзора, при различных соотношениях числа импульсов с разными несущими частотами и постоянных вероятностях обнаружения и ложной тревоги (рис. 14).
Сравнивая графики, нетрудно убедиться, что при изменении соотношения импульсов с разными несущими частотами от 1:1 (равномерное распределение частот) до 1 : 5 потери в пороговом отношении сигнал/шум составляют не более 1 дБ.
Наименее помехозащищенными являются многочастотные РЛС с линейным суммированием сигналов. Для их подавления достаточно создать эффективную помеху на одной из рабочих частот РЛС. Помеха по соответствующему частотному каналу беспрепятственно проходит к суммирующему устройству, где складывается с полезными сигналами остальных каналов приемника и либо маскирует их, либо создает дезинформирующую радиолокационную обстановку. Таким образом, многочастотные РЛС с линейным суммированием сигналов по помехозащищенности значительно уступают аналогичным многочастотным РЛС с независимой обработкой сигналов и лишь несколько превосходят соответствующие одночастотные РЛС благодаря лучшему отношению сигнал/шум.
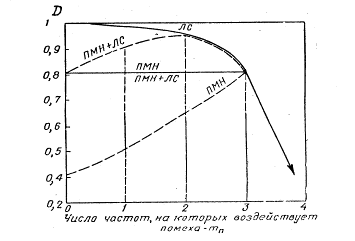
Рис. 15. Зависимость вероятности обнаружения цели четырехчастотной РЛС от числа подавленных помехой рабочих частот
Помехозащищенность многочастотных РЛС с суммированием сигналов может быть повышена путем маневрирования их рабочими частотами за счет выключения отдельных приемных каналов, подавленных помехами. Естественно, при уменьшении числа используемых частот снижается эффект многочастотной работы, но зато сохраняется работоспособность РЛС.
В качестве примера на рис. 15 показано, как изменяется вероятность обнаружения целей четырехчастотной РЛС с линейным суммированием (ЛС) сигналов по мере уменьшения числа используемых частот от 4 до 1 (сплошная линия ЛС). Из рисунка видно, что вероятность обнаружения целей при одночастотном приеме сигналов уменьшается в 1,25 раза по сравнению с вероятностью обнаружения целей в отсутствии помех. С уменьшением числа используемых частот снижается также точность определения угловых координат целей вследствие ухудшения сглаживания флюктуаций отраженных сигналов.
Наиболее помехозащищенным способом совместной обработки многочастотных сигналов является их перемножение (ПМН). Для подавления многочастотных РЛС, использующих этот способ объединения сигналов, необходимо создать помехи на всех рабочих частотах РЛС. Отсутствие помехи на одной из рабочих частот РЛС означает равенство нулю одного из сомножителей произведения совместно обрабатываемых сигналов, вследствие чего исключается возможность проникновения помех в общую часть приемно - индикаторного тракта РЛС.
Поскольку при воздействии помех на отдельных частотах РЛС с перемножением сигналов нет надобности в выключении соответствующих приемных каналов, вероятность обнаружения целей такой РЛС остается неизменной до тех пор, пока отсутствует помеха хотя бы на одной рабочей частоте РЛС (сплошная линия ПМН на рис. 15).
На рис. 15 графически представлена зависимость вероятности обнаружения цели четырехчастотной РЛС с по парным перемножением сигналов и последующим суммированием произведений от числа частот РЛС, на которых воздействуют помехи: при выключении каждого приемного канала, где воздействует помеха (пунктирная линия ПМН+ЛС); при выключении приемных каналов только в случае утраты работоспособности РЛС и постоянной вероятности ложной тревоги системы F=l0-3 (сплошная линия ПМН+ЛС). Из рисунка видно, что четырехчастотная РЛС с комбинированным способом объединения сигналов при постоянной вероятности ложной тревоги имеет примерно такие же характеристики обнаружения, как и РЛС с перемножением сигналов.
Возможность маневрирования частотами в многочастотных РЛС является важным фактором их помехозащищенности. Однако применение частотного маневрирования в качестве средства защиты от активных помех в ряде случаев ограничивается снижением эффективности радиолокационных устройств (например, уменьшение дальности действия, возрастание ошибок определения угловых координат, ухудшение точности автосопровождения).
Заключение
Радиолокация представляет собой средство расширения возможностей человека определять наличие и положение объектов за счет использования явлений отражения радиоволн этими объектами. Ее ближайшим конкурентом при выполнении этих функций является оптическая техника, включающая телескопы, которые обладают высокой точностью и обычно имеют фотографические регистрирующие устройства. Преимущество радиолокационных средств по сравнению с оптическими состоит в том, что радиолокационные устройства могут работать в темноте и сквозь облака, обладают большой дальностью действия и позволяют определять дальность до объекта со значительно большей точностью, нежели оптические устройства. Хотя световые волны также являются электромагнитными, но в радиолокации частота их намного ниже. Это позволяет применять радиотехнические методы и схемы.
Развитие радиолокации явилось важной частью технической революции двадцатого века. Военная техника, использующая принципы радиолокации, впервые была создана перед самым началом второй мировой войны; с этого времени наблюдается быстрый и непрерывный прогресс в указанной области.
Список литературы
1) Перминов И.Г. «Физические основы получения информации». 2006 год.
2) Артамонов В.М. «Электроавтоматика судовых и самолетных радиолокационных станций». 1962 год.
3) Современная радиолокация. Анализ, расчет и проектирование. Под редакцией Кобзарева Ю.В., М., Сов. радио, 1969г.-704стр.
4) Дулевич В.Е. Теоретические основы радиолокации. М., Сов. радио, 1978г. 608стр.
5) Ширман Я.Д. Теоретические основы радиолокации. М., Сов. радио, 1970г. 560стр.