


Использование ЛЧМ сигналов при построении приемника радиолокационной станции сопровождения
Радиолокация – область радиотехники, обеспечивающая радиолокационное наблюдение различных объектов, то есть их обнаружение, измерение координат и параметров движения, а также выявление некоторых структурных или физических свойств путем использования отраженных или переизлученных объектами радиоволн либо их собственного радиоизлучения.
Информация, получаемая в процессе радиолокационного наблюдения, называется радиолокационной. Радиотехнические устройства радиолокационного наблюдения называются радиолокационными станциями (РЛС) или радиолокаторами. Сами же объекты радиолокационного наблюдения именуются радиолокационными целями или просто целями. При использовании отраженных радиоволн радиолокационными целями являются летательные аппараты (самолеты, вертолеты, метеорологические зонды и др.), гидрометеоры (дождь, снег, град, облака и т. д.), речные и морские суда, наземные объекты (строения, автомобили, самолеты в аэропортах и др.), всевозможные военные объекты и т.
Источником радиолокационной информации является радиолокационный сигнал. В зависимости от способов его получения различают следующие виды радиолокационного наблюдения.
1. Радиолокация с пассивным ответом, основанная на том, что излучаемые электромагнитные колебания (зондирующий сигнал) - отражаются от цели и попадают в приемник РЛС в виде отраженного сигнала. Такой вид наблюдения иногда называют также активной радиолокацией с пассивным ответом.
2. Радиолокация с активным ответом, именуемая активной радиолокацией с активным ответом, характеризуется тем, что ответный сигнал является не отраженным, а переизлученным с помощью специального ответчика – ретранслятора. При этом заметно повышается дальность и контрастность радиолокационного наблюдения.
3. Пассивная радиолокация основана на приеме собственного радиоизлучения целей, преимущественно миллиметрового и сантиметрового диапазонов. Если зондирующий сигнал в двух предыдущих случаях может быть использован как опорный, что обеспечивает принципиальную возможность измерения дальность и скорости, то в данном случае такая возможность отсутствует.
Выделение полезной информации о цели обеспечиваются соответствующими радиотехническими устройствами - РЛС. Таким образом, систему РЛС можно рассматривать как радиолокационный канал. Основными составными частями РЛС являются передатчик, приемник, антенное устройство, оконечное устройство.
Развитие современной техники, сложность решаемых задач, высокие требования к надежности, простоте управления, оперативности, все это отразилось на построении РЛС.
Большинство РЛС с импульсной модуляцией имеет одну антенну, снабженную специальным антенным переключателем для перехода из режима передачи в режим приема и наоборот.
Передатчик РЛС вырабатывает высокочастотные колебания, которые модулируются по амплитуде, частоте или фазе иногда весьма сложным образом. Эти колебания подаются в антенное устройство и образуют зондирующий сигнал. Наряду с простыми радиоимпульсами может применяться внутриимпульсная частотная модуляция и фазовая манипуляция. Другим видом зондирующего сигнала является непрерывный. Здесь наряду с незатухающими гармоническими колебаниями могут использоваться частотно-модулированные и др.
Приемник РЛС необходим для выделения полезного сигнала из помех (так называемая первичная обработка сигнала). Оконечное (выходное) устройство служит для представления радиолокационной информации в нужной потребителю форме. Если потребителем является человек-оператор, то используется визуальная индикация. Для потребителя в виде вычислительного устройства непрерывного действия оконечным является устройство автоматического сопровождения цели по измеряемому параметру (дальность, угловые координаты, скорость), и полезная информация выдается в виде напряжений или токов, функционально связанных с этими параметрами. Если же оконечным устройством является ЭВМ, то радиолокационная информация преобразовывается в двоичный код. При этом в ЭВМ происходит дальнейшая, так называемая вторичная обработка сигнала.
Радиолокационная информация, поступающая от РЛС, транслируется по радиоканалу или по кабелю на пункт управления. Процесс слежения РЛС за отдельными целями автоматизирован и осуществляется с помощью ЭВМ.
1. Назначение, технические данные, состав и работа РЛС 9S35М1 по структурной схеме
1.1 Назначение
Радиолокационная станция 9S35М1 предназначена для работы в составе самоходной огневой установки и обеспечивает (8):
-обнаружение, захват, распознавание и автоматическое сопровождение по скорости и дальности воздушных целей;
-определение координат целей и передачу информации на цифровую вычислительную систему 9S471М1;
-подсвет сопровождаемых целей для обеспечения работы головки самонаведения зенитной управляемой ракеты и передачу команд;
-полуавтоматическое или ручное сопровождение целей с помощью телевизионного оптического визира (ТОВ).
Работа РЛС 9S35М1 возможна в двух режимах:
-в режиме целеуказания (ЦУ);
-в автономном режиме.
РЛС 9S35М1 имеет два вида излучаемых и принимаемых сигналов:
-импульсный с внутриимпульсной линейно-частотной модуляцией (ЛЧМ) текущей частоты;
-квазинепрерывный (КНИ) с малым периодом следования импульсов.
Преимущества импульсного режима:
-однозначное определение дальности в режиме "Обзора";
-повышенная помехоустойчивость от несинхронных импульсных помех;
-наличие режима ЦСДЦ (цифровая селекция движущихся целей) для защиты от пассивных помех и отражений от местных предметов.
Преимущества режима КНИ:
-защищенность от мощных пассивных помех и местных предметов;
-высокая разрешающая способность по скорости.
Недостатки режима КНИ:
-отсутствие информации о дальности до цели в режиме "Обзора";
-невозможность работать по малоскоростным целям (скорость цели менее 50 м/сек).
1.2 Технические характеристики РЛС 9S35М1
1. Средняя мощность передатчика "Обзора" РЛС:
- режим ИМП - не менее 1,0 кВт;
- режим КНИ - не менее 1,0 кВт.
2. Мощность передатчика подсвета - не менее 1,9 кВт.
3. Зона поиска в автономном режиме:
-по азимуту ±60º;
-по углу места 0º÷6º(Зона Низ) и 6º÷12º (Зона Верх)
-время цикла поиска - 4 сек
Режим работы построчный - 5 строк.
4. Зона поиска в режиме ЦУ:
- по азимуту ±45º;
- по углу места до 57º;
-время цикла поиска в Зоне 10º - 2 сек.
5. Зона сопровождения воздушных целей:
-по азимуту ±60º;
-по углу места от -10º+72º.
6. Точность сопровождения целей:
-по угловым координатам - 00-05 д.у.;
-по дальности - не более 180 м;
-по скорости - не более 30 м/сек
7. Время готовности РЛС к работе - не более 3 мин.
1.3 Состав РЛС
РЛС - изделия 9S35М1 состоит из следующих систем:
-передающая система - ПрдС;
-антенно-волноводная система - АВС;
-приемная система - ПрС;
-система синхронизации -СС;
-система индикации -СИ;
- цифровая система измерения дальности -ЦСИД;
- система сопровождения по скорости -ССС;
- система целеуказания -СЦУ;
- система распознавания класса цели -СРКЦ;
- система управления антенной - СУА:
а) канал поиска
б) канал углового сопровождения
в) канал сопровождения НЛЦ
г) канал управления ТОВ
- система встроенного контроля -СВК;
- система защиты от помех -СЗП:
а) цифровая система селекции движущихся целей -ЦСДЦ
б) блок видеокомпенсации -ВК
в) блок цифрового обнаружения -БЦО
- система питания.
- система питания воздухом - СПВ;
- система жидкостного охлаждения - СЖО.
1.4 Назначение систем РЛС
Система передающая предназначена для формирования:
-зондирующих сигналов в импульсном режиме с линейной частотной модуляцией (ЛЧМ), в режиме квазинепрерывного излучения (КНИ);
-генерирующего сигнала для приемной системы;
-сигнала подсвета цели и ракеты;
Антенно-волноводная система предназначена для:
-одновременной канализации электромагнитной энергии по каналам "Обзор" и "Подсвет" с выхода радиопередающего устройства (РПДУ) на выход суммарного канала облучателя;
-передачу электромагнитной энергии от облучателя на вход приемника в режиме "Обзор";
-амплитудной суммарно-разностной обработки сигналов с трех выходов облучателя, обеспечивающей пеленгацию цели методом скрытого "конического" сканирования (режим сопровождения);
-работы на "Эквивалент" по каналам "Обзор" и "Подсвет".
Система приемная предназначена для усиления и преобразования сигналов, отраженных от целей в вид, удобный для извлечения информации о наличии целей, их дальности и скорости.
Система синхронизации предназначена для согласования во время работы всех импульсных устройств РЛС и наземного радиолокационного приемника.
Система индикации предназначена для:
-визуального наблюдения за воздушной обстановкой;
-анализа воздушных целей;
-ориентировочной оценки их скорости, дальности и угловых координат;
-принятия решения на захват выбранной цели;
-наведения РЛС для осуществления захвата.
Цифровая система измерения дальности (ЦСИД) предназначена для измерения дальности до цели и сопровождения ее по дальности.
Система сопровождения по скорости предназначения для измерения скорости цели и сопровождения ее по скорости.
Система целеуказания предназначена для:
-вывода центра зоны поиска антенны в направлении на цель по азимуту и углу места;
-вывода частоты управляемого гетеродина в диапазон доплеровских частот, соответствующих скорости полета цели в режиме КНИ;
-целеуказания по дальности в импульсном режиме.
Система распознавания класса цели предназначена для распознавания класса сопровождения цели на основе анализа спектра отраженного от цели радиолокационного сигнала.
Система управления РЛС предназначена для включения станции и управления ею в процессе боевой работы.
Система управления антенной предназначена для управления антенной РЛС при поиске, обнаружении и сопровождении воздушных целей в различных режимах.
Канал поиска предназначен для управления антенной при обзоре заданной зоны пространства.
Канал углового сопровождения предназначен для:
-автоматического сопровождения цели по угловым координатам;
-инерционного сопровождения цели;
-сопровождения цели в режиме ТОВ;
-ручного управления антенной.
Канал сопровождения низколетящих целей (НЛЦ) предназначен для сопровождения целей, летящих на малых высотах, при влиянии сигнала зеркального отражения цели от земли ("антипода") на работу угловой автоматики.
Канал управления телевизионным оптическим визиром (ТОВ) предназначен для ручного и полуавтоматического сопровождения цели.
Система встроенного контроля предназначена для:
-оперативного контроля;
-контроля функционирования систем РЛС;
-диагностического контроля, обеспечивающего отыскание неисправности с точностью до конструктивно-съемного блока или узла.
Система защиты от помех обеспечивает выполнение боевой задачи в условиях организованного радиопротиводействия.
Система питания предназначена для питания системы РЛС.
1.5 Работа РЛС 9S35М1 по структурной схеме
РЛС представляет собой устройство (Рис.1), работающее в двух режимах:
-импульсном;
-квазинепрерывном.
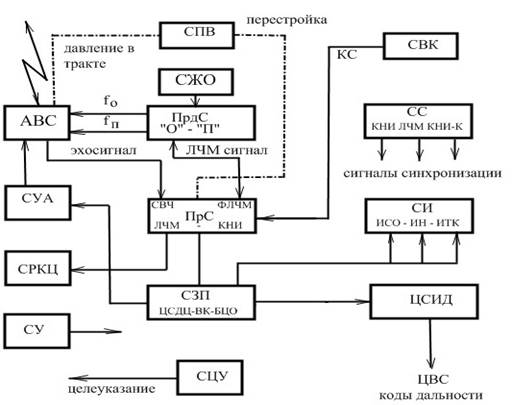
Рис 1. Структурная схема РЛС 9S35М1.
Независимо от вида излучаемого сигнала (ЛЧМ или КНИ) передатчиком Обзора «О», формирование СВЧ сигналов производится на одной из фиксированных частот.
Передатчик «О» формирует мощные когерентно-импульсные сигналы с частотой fо, излучаемые через антенну в пространство для обзора заданной зоны поиска целей и генерирующий сигнал частотой fо-28 МГц, поступающий в приемную систему для обеспечения когерентной обработки принимаемых сигналов.
Для подсвета цели и ракеты передатчик Подсвета «П» генерирует СВЧ энергию на фиксированных частотах отличных от частот передатчика «О».
СВЧ энергия с передатчиков «О» и «П» поступает по передающему волноводному тракту в антенну.
В антенне формируется диаграмма направленности на передачу и прием СВЧ сигналов. Обзор пространства производится в секторе 120º по азимуту и в 6º по углу места. Применен линейный способ сканирования (Приложение 1, с. 42).
Принятые антенной отражаемые сигналы по волноводному тракту поступают на два приемника СВЧ, куда в качестве опорного напряжения поступает непрерывный сигнал с передающей системы на частоте fо-28.
Двухканальный приемник выбран с целью повышения помехозащищенности канала углового сопровождения. С выхода СВЧ приемников сигналы промежуточной частоты 28 МГц поступают в блок сжатия ЛЧМ сигнала, где происходит их сжатие до 1,7 мкс.
Продетектированные сигналы с выхода блока сжатия ЛЧМ через систему ЦСДЦ поступают в системы углового сопровождения, индикации и цифровую систему измерения дальности.
Принятая информация отраженных сигналов и служебных меток отображается на экранах индикаторов системы индикации. Радиолокационная обстановка отображается в режиме ЛЧМ в координатах азимут-дальность, в режиме КНИ в координатах азимут-дальность-скорость.
Переход на автосопровождение цели осуществляется при наличии цели в луче, ее стробировании по дальности. При захвате цели, РЛС переходит на автосопровождение цели по угловым координатам (Приложение 1, с. 45, с. 53) и дальности.
Синхронизация работы системы РЛС осуществляет система синхронизации импульсами в режиме ЛЧМ длительностью 50 или 100 мкс, в режиме КНИ длительностью 4..10 мкс.
Для установления типа и класса средств воздушного нападения введена система распознавания. Метод радиолокационного распознавания основан на анализе изменений спектра отраженного сигнала, вызванных вращательным движением элементов двигателя самолета или винта вертолета.
В системе распознавания реализовано2 независимых канала распознавания целей:
-автоматического распознавания;
-канал слухового распознавания.
Автоматический канал распознавания обеспечивает распознавание трех классов целей:
А - аэродинамическая;
Б - баллистическая;
В - вертолет.
Канал звукового распознавания обеспечивает возможность прослушивания по головным телефонам звукового фона (портрета) сопровождаемой цели.
Системе углового сопровождения предназначена для определения угловых координат цели и обеспечивает нахождение цели в РСН ДНА.
В режиме КНИ сигнал (Приложение 1, с. 65) с выхода пеленгационных приемников У1, У2, а в ИР импульсы цели поступают на схему ВСО, где осуществляется выделение сигнала ошибки. Огибающие сигналов ошибки поступают на приводы АЗ и УМ АВС, которые разворачивают рефлектор и луч антенны до тех пор, пока сигнал ошибки не станет равным нулю.
Для предотвращения сопровождения сигнала "антипода" вход схемы ВСО отключается от приемников и подключается к сигналам для сопровождения по запомненной текущей высоте, данные о которой поступают из ЦВС.
Канал поиска служит для обнаружения целей в широкой или узкой зоне пространства и обеспечения захвата цели по угловым координатам. Режимы работы:
-автономный (зона поиска ±60 º по АЗ и 6º по УМ);
-режим ЦУ (зона поиска ±5º по АЗ и 6º по УМ относительно координат ЦУ).
Канал управления ТОВ обеспечивает выработку сигналов коммутации и наведения по АЗ и УМ поступающих на приводы АЗ и УМ. Под воздействием этих сигналов осуществляется разворот телевизионной камеры в направлении на цель. ТОВ может работать в режимах с излучением и без излучения РЛС.
Для обеспечения работы в режиме ЦУ и для опознавания цели РСЛ сопряжена с изделиями ЦВС, ПУ, НРЗ.
Сопряжение осуществляется по цепям: целеуказания, индикации, управления и контроля.
1.6 Приемная система РЛС 9S35М1
Наличие двух различных, по своим физическим возможностям, приемников в значительной степени повысили возможности станции по поиску целей и помехозащищенности. В свою очередь приемник ЛЧМ состоит из двух идентичных каналов. В зависимости от режима работы может работать один из двух каналов или сразу оба, что существенно повысило надежность работы РЛС. Одновременная работа двух приемников ЛЧМ при сопровождении цели обеспечивает защиту РЛС от уводящих помех по угловым координатам.
Использование второго канала приемника ЛЧМ, в режиме автокомпенсации помех, обеспечивает защиту РЛС от воздействия помех по боковым лепесткам (Приложение 1, с. 59).
ЛЧМ приемник являясь, по сути, моноимпульсным координатором обладает всеми его свойствами (Приложение 1, с. 55):
-так как угловая информация выделяется в виде отношений сигналов, то точность измерения сигнала не зависит от амплитуды флюктуации отраженного сигнала;
-выделение информации о трех координатах цели производится на основании принятого одного отраженного сигнала;
-отсутствие методических ошибок по сравнению с координаторами линейного и конического сканирования, другими словами форма отраженного сигнала не зависит от скорости распространения радиоволн;
-большая дальность действия, так как излучение электромагнитных волн происходит вдоль равносигнального направления (РСН).
Отличительной особенностью приемника КНИ является то, что облучение цели осуществляется высококогерентными импульсами малой скважности (Приложение 1, с. 65). Отраженный сигнал от цели принимается также в виде импульсных сигналов. А извлечение информации осуществляется таким же образом, как и при непрерывном излучении, то есть путем анализа одной составляющей спектра принятого когерентно-импульсного сигнала малой скважности.
Задача, на поиск и выделение цели из спектра принимаемого сигнала, возложена на обзорный приемник, что позволяет иметь непосредственно информацию о скорости цели. Но для сопровождения цели по скорости и устранения неоднозначности по скорости и слепой скорости используется канал сопровождения по скорости с привлечением ЦВС.
Для сопровождения цели по угловым координатам и дальности в приемник КНИ понадобилось ввести канал сопровождения по угловым координатам и дальности. Если работа канала сопровождения по угловым координатам приемника КНИ существенно не отличается от работы приемника сопровождения в импульсном режиме, то работа дальномерного приемника имеет ряд отличий.
Отличия связаны прежде всего с возникновением в режиме КНИ явления слепой скорости и неоднозначности по дальности, для устранения которых понадобилось изменить общепринятую схему построения приемника сопровождения по дальности, а также задействовать ЦВС для решения ряда задач.
Важное техническое решение было найдено, при проектировании приемной системы, в использовании одних и тех же узлов и элементов системы синхронизации для работы РЛС в режиме ЛЧМ и КНИ. Это стало возможным благодаря сохранению одинаковой скважности для обоих режимов - равной 10, а использование линейной частотной модуляции в импульсном режиме, сняло все проблемы возникающие при большой длительности излучаемого сигнала. С другой стороны, большая длительность сигнала в режиме ЛЧМ дает ряд преимуществ.
Таким образом, приемная система РЛС 9S35М1 воплотила в себе самые последние научные разработки и достижения в радиолокации (6).
1.6.1 Основные технические характеристики
1.Динамический диапазон (дБ)
режим ЛЧМ - не менее 70
режим КНИ - не менее 80
2.Диапазон доплеровских частот (кГц) - от -17 до +60
3.Коэффициент шума (дБ) - не более 7,5
4.Уровень сигнала на выходе приемника ЛЧМ (В)
амплитудный режим - 2,25 ÷ 2,75
фазовый режим - 4,5 ÷ 5,5
5.Уровень шумов на выходе приемника ЛЧМ (В)
амплитудный режим - 1,1 ÷1,4
фазовый режим - 0,08 ÷ 0,12
6.Длительность ЛЧМ сигнала (мкс) - 100 (50)
7.Девиация частоты внутри ЛЧМ сигнала (кГц) - 900
8.Длительность сжатого импульса в приемнике
ЛЧМ (мкс) - 1,7 ± 0,33
9.Перекрытие доплеровского диапазона
приемника КНИ (кГц) - от 2,5 до 22,5
10.Коэффициет усиления приемника КНИ - более 110000
Рассмотрим более детально формирование и использование ЛЧМ сигнала в приемной системе(1, c 36, c 40).
1.6.2 Использование ЛЧМ сигнала
В РЛС для решения проблемы получения максимальной дальности при малой мощности сигнала увеличили длительность импульса. Как видно из графика (Рис.2) энергия сигнала Еs (энергетическая емкость) зависит от длительности и мощности импульса. При равных параметра цели, максимальная дальность Дmax для обоих случаев будет одинаковая (3).
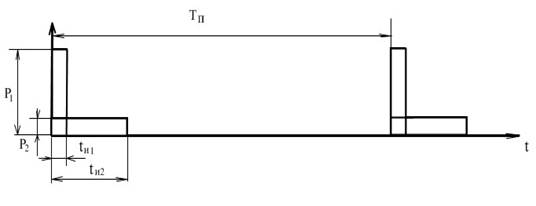
Рис. 2
При этом:
Еs1 = Еs2 ,
где Еs 1 ≈Р1*tи1 , а Еs 2 ≈Р2*tи2 ,
а скважность сигналов q1=![]() ; q2=
; q2=![]()
Уравняв обе половины, получили:
![]()
Следовательно при увеличении скважности, для сохранения заданной дальности обнаружения необходимо увеличивать мощность сигнала. При уменьшении скважности – мощность можно понизить.
Минимальная мощность отраженного сигнала, которая будет различима на фоне шума определяется как:
Рпр min=ν Рш ;
Рш =No*Δfэ
Где, ν – коэффициент различимости,
Рш - мощность шума,
No –спектральная плотность шума,
Δfэ –эффективная полоса пропускания.
Таким образом, для первого случая предъявляются высокие требования к надежности оконечного усилителя мощности и защите волноводов от электрического пробоя. Во втором случае – ухудшаются характеристики по разрешению по дальности.
Для решения этой проблемы в РЛС используются дисперсионные ультразвуковые линии задержки (ДУЛЗ). Свойство их таково, что радиоимпульсы на разной частоте, проходят линию задержки с разным временем (3).
ДУЛЗ- представляет собой элемент по которому распространяются ультразвуковые колебания. Дисперсионной она считается, если время задержки в этой линии зависит от частоты ультразвуковых колебаний (Рис. 3).
Таким образом при подаче на вход ДУЛЗ, короткого прямоугольного импульса, имеющего линейчатый спектр, на выходе ДУЛЗ будет получен «растянутый» радио импульс с частотой заполнения меняющейся по линейному закону.
И на оборот, при подаче на вход ДУЛЗ импульса с ЛЧМ, при этом низкие частоты должны поступить первыми, произойдет сжатие импульса по длительности.

Рис. 3
1.6.3 Блок формирования ЛЧМ сигнала в РЛС 9S35М1
Блок формирования ЛЧМ сигнала обеспечивает формирование ЛЧМ радиоимпульса на промежуточной частоте, видеоимпульса для модуляции передатчика и опорного когерентного напряжения для обеспечения работы приемника в режиме СДЦ (1 c.40).
Технические данные:
-длительность ЛЧМ сигнал -100(50) мкс;
-девиация частоты внутри ЛЧМ сигнала -900 кГц;
-амплитуда ЛЧМ сигнала -0,5 В;
-средняя частота сигнала -28 МГц;
-амплитуда ИЗП не менее -2,5 В;
-длительность ИЗП -100 (50)мкс;
-длительность фронтов ИЗП, не более -0,5 мкс
-амплитуда опорного напряжения -0,7 В;
частота опорного напряжения -10 МГц.
Состав (Рис.4):
-гетеродин – 10 (У1);
-двухканальный оптимальный фильтр (ОФ) формирования ЛЧМ сигнала (У2);
-смеситель 10/28 для переноса ЛЧМ сигнала на промежуточную частоту (У6);
-смеситель 10/28/10 для преобразования опорного когерентного напряжения(У8);
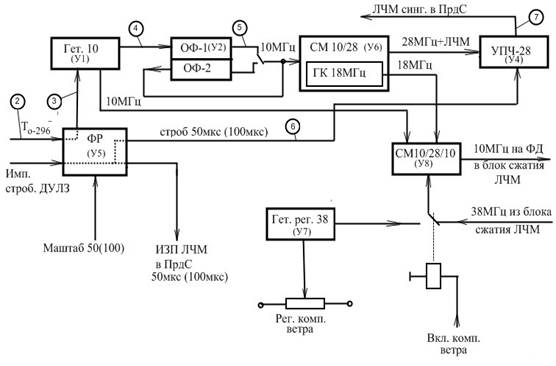
Рис.4 Функциональная схема блока формирования ЛЧМ
-УПЧ-28 для компенсации затухания ОФ (У4);
-гетеродин 38, регулируемый для компенсации пассивных помех (У7);
-формирователь Фр (У5) импульсов возбуждения ДУЛЗ и импульсов запуска передатчика;
-коммутатор каналов ОФ и согласующие фильтры Ф1, Ф2.
Для формирования ЛЧМ сигнала и опорного когерентного с ним напряжения используется напряжение кварцевого генератора узла У1 (Гетеродин - 10) частотой 10МГц (Рис. 5 эпюра 1).
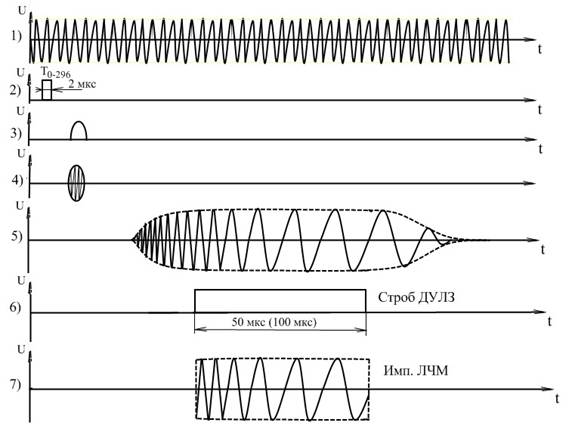
Рис. 5
Чтобы исключить аппаратную задержку сигнала на средней частоте ОФ (tз =142,8±0,5) мкс (в режиме "Масштаб 50") при формировании ЛЧМ сигнала и при последующем сжатии его в блоке формирования ЛЧМ и обеспечить совмещение сжатого импульса с "нулем" отсчета дальности, возбуждение оптимального фильтра производится опережающим импульсом «То-296» , «То-584» поступающим из блока системы синхронизации (эпюра 2). Импульс «То-296» при прохождении через инвертор и схему формирования колоколообразного импульса в формирователе Фр формирует видеоимпульс длительностью 0,3-0,4 мкс, необходимый для получения радиоимпульса возбуждения ОФ (эпюра 3).
Полученный радиоимпульс длительностью 0,3-0,4 мкс поступает в на вход Гетеродина 10 (У1).
На выходе манипулятора Гетеродина 10 из непрерывного колебания кварцевого генератора формируется радиоимпульс с частотой заполнения 10,0МГц, соответствующей рабочей частоте ОФ (эпюра 4).
После усиления радиоимпульс подается на ОФ, на выходе которого получается отклик длительностью около 100мкс (эпюра 5) для «Масштаба 50 км», с изменяющейся в соответствии с дисперсионной характеристикой ОФ частотой внутри отклика (ЛЧМ отклик).
В режиме «Масштаб 50» полученный ЛЧМ отклик (радиоимпульс) подается через согласующий фильтр на вход смесителя 10/28 (У6).
В режиме «Масштаб 100» радиоимпульс с выхода узла Гетеродин 10 (У1) проходит через два последовательных оптимальных фильтра (ОФ-1, ОФ-2). Таким образом, полученный ЛЧМ сигнал, увеличивается по длительности (при той же девиации частоты) до 200 мкс и уменьшается по амплитуде. На выходе ОФ-2 имеем сигнал с внутриимпульсной ЛЧМ с линейным участком длительностью 100мкс и девиацией частоты 900кГц.
Дальнейшее прохождение сигнала в цепях блока в режиме «Масштаб 100» не отличается от прохождения в режиме "Масштаб 50".
Перенос ЛЧМ отклика на промежуточную частоту станции 28МГц производится в смесителе 10/28 (У6) с помощью автономного кварцевого генератора 18МГц. Усиленный на частоте 28МГц отклик подается на манипулятор в УПЧ-28 (У4), который обеспечивает формирование из полного отклика ОФ ЛЧМ сигнал с заданными параметрами. Манипулятор открывается положительным импульсом "Строб ДУЛЗ" с Фр (эпюра 6).
Импульс "Строб ДУЛЗ" формируется из импульса стробирования ДУЛЗ, поступающего из системы синхронизации на формирователь Фр, что необходимо для точной установки частоты 28МГц в середине импульса 50мкс.
Полученный на выходе манипулятора узла СМ 10/28 ЛЧМ сигнал усиливается и подается в (эпюра 7) передающее устройство.
Для синхронной работы передающего и приемного устройства в блоке формирования ЛЧМ сигнала из строба ДУЛЗ с помощью формирователя Фр вырабатывается импульс запуска передатчика ИЗП ЛЧМ, поступающий в подмодулятор передатчика «О».
Кроме этого когерентное напряжение 10 МГц с Гетеродина -10 используется в качестве опорного напряжения в блоке сжатия принятого ЛЧМ сигнала. Для этого, непрерывное синусоидальное напряжение кварцевого генератора узла У1 частотой 10 МГц, поступающее на смеситель 10/28 узла У8, куда также поступает синусоидальное напряжение кварцевого генератора частотой 18 МГц из узла У6, что обеспечивает введение начальной фазы генератора частоты 18 МГц и последующее вычитание ее на фазовом детекторе блока сжатия ЛЧМ.
Преобразованный на частоту 28МГц сигнал поступает через полосовой фильтр на смеситель 28/10 У8, куда через контакты реле поступает напряжение кварцевого генератора частотой 38 МГц из блока сжатия ЛЧМ для последующей компенсации его случайной начальной фазы на фазовом детекторе блока сжатия.
При работе в условиях пассивных помех и для исключения влияния скорости ветра, предусмотрен режим КОМПЕНСАЦИИ ВЕТРА. В этом случае по команде «+27В ВКЛ КОМП ВЕТРА» через контакты реле по входу смесителя 10/28/10 узла У8 подключается напряжение регулируемого кварцевого гетеродина частотой 38 МГц узла У7.
Изменяя напряжение управления с помощью потенциометра, частота регулируемого гетеродина 38 меняется в пределах ±6кГц тем самым добиваются компенсации движения пассивной помехи.
1.6.4 Блок сжатия ЛЧМ сигнала в РЛС 9S35М1
Блок обеспечивает усиление поступающих по двум каналам сигналов с оптимальным фильтром (ОФ), сжатия ЛЧМ сигналов на ОФ, квазивесовую обработку сжатых сигналов, детектирование сжатых сигналов в амплитудном и квадратурном фазовом детекторах, работу в амплитудном ( АР) или фазовом ( ФР) режимах, поддержание заданного уровня шумовой помехи, работу в режиме видеокомпенсации и выдачу команды «+27 В ПОМЕХА».
Технические характеристики.
1.Коэффициент усиления в I и II канале:
-амплитудный режим, не менее - 94 дБ
- фазовый режим - 85± 4 дБ.
2.Уровень ограничения сигнала в I и II канале:
- амплитудный режим, не менее - 5 В
- фазовый режим не менее - ± 9 В
3.Длительность сжатого импульса по уровню 0,5
("Масштаб 50") - 1,7±0,33 мкс
4.Порог АРУимп.:
- амплитудный режим - 2,5±0,25В
- фазовый режим - 5±0,5 В
5.Диапазон РРУ, не менее - 70 дБ
6.Порог АРУ по шумам:
- амплитудный режим - 1,1÷1,4 В
- фазовый режим - 0,08±0,12В.
7.Порог АРУ по шумовой помехе:
- амплитудный режим -2,5±0,25 В
- фазовый режим - 1±0,1В.
Состав блока сжатия ЛЧМ:
- усилители ПЧ (УПЧ) регулируемые (У2) - 2 шт.;
- двухканальные оптимальные фильтры (ОФ)
для сжатия ЛЧМ сигнала (У4) - 2 шт.;
- усилители квазивесовой обработки (УПЧ-кво) (У14) - 2 шт.;
- квадратурные фазовые детекторы (У18) - 2 шт.
- гетеродин 38 (У1) - 1 шт.;
- усилители АРУ - 2 шт.
Кроме того блок содержит: видеоусилители (6 шт.), формирователь, коммутаторы, согласующие фильтры и компенсирующие усилители, узел СХИП.
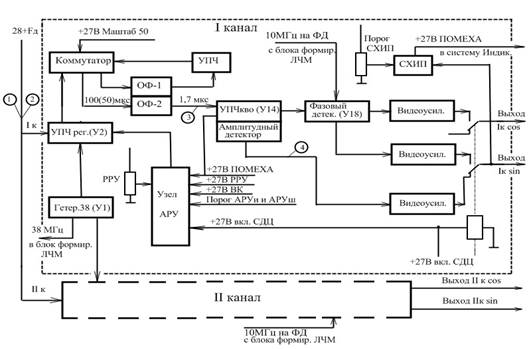
Рис. 6 Функциональная схема блока сжатия ЛЧМ.
Блок сжатия содержит два идентичных канала, поэтому работу блока рассмотрим на примере I канала (Рис.6).
После усиления принятого сигнала на частоте fo в высокочастотном приемнике и преобразования его в промежуточную частоту 28МГц + Fд, сформированный ЛЧМ сигнал, длительностью 50 или 100 мкс с девиацией частоты внутри импульса 0,9 МГц поступает на смеситель 28/10 узла У2 усилителя ПЧ регулируемого блока сжатия ЛЧМ сигнала, где производится согласование спектра ЛЧМ сигнала с дисперсионной характеристикой оптимального фильтра, для чего на 2-й выход смесителя 28/10 (УПЧ регулируемого) подается напряжение гетеродина 38 (У1) с частотой 38 МГц.
Эта же частота 38МГц используется в блоке формирования ЛЧМ (Рис.4).
На выходе смесителя (УПЧ рег.) получается ЛЧМ сигнал, согласованный с дисперсионной характеристикой ОФ на рабочей частоте 10,0МГц. С выхода смесителя 28/10 ЛЧМ сигнал поступает на управляемый делитель, используемый для работы различных схем АРУ по шумам и импульсу или шумовой помехе и ограничитель. Коэффициент усиления УПЧ рег. (У2) уменьшается дискретно на 20 дБ по команде «+ 27 В ПОМЕХА» или «+ 27В СДЦ». В результате на выходе узла У2 устанавливается соотношение сигнал / шум - 26 дБ в штатном режиме и 6 дБ в режимах СДЦ и сопровождения источника шумовой помехи.
С выхода У2 сигнал, через коммутатор, поступает на двухканальный оптимальный фильтр У4 для сжатия. Коммутация сигналов в режимах" Масштаб 100" и " Масштаб 50" для двухканального ОФ осуществляется аналогично как и в блоке формирования ЛЧМ сигнала.
Сигналы с оптимального фильтра с целью снижения уровня боковых лепестков поступают на узел квазивесовой обработки УПЧ-кво (У14).
Для обеспечения заданного уровня сигналов при диапазоне 26 дб в амплитудном режиме АР усиление УПЧ-кво увеличивается на 20 дБ по команде «+ 27В ПОМЕХА». На выходе У14 получается сигнал частотой 10 МГц длительностью 1,7мкс (Рис.7) с уровнем боковых лепестков на линейном участке характеристики не более 14 дБ. Сигнал с УПЧ-кво (У14) подается на квадратурный детектор У18 для обеспечения работы в режиме СДЦ, а также на амплитудный детектор для работы в амплитудном режиме.
В амплитудном режиме сигнал с видеоусилителя У20 и реле поступает в систему индикации, углового сопровождения и ЦСИД.
При работе блока сжатия в режиме ЦСДЦ в квадратурном фазовом детекторе (У18) происходит разложение сигнала на квадратурные составляющие и фазовое детектирование. Для разложения сигнала на квадратурные составляющие в узле (У18) предусмотрены цепочки LR и CR, сдвигающие опорное напряжение на ±45º. С выходов квадратурного детектора составляющие сигнала, через видеоусилители У16, У22 и контакты реле поступают на выходы sin и cos блока сжатия и далее в схему выделения сигнала ошибки.
Таким образом в амплитудном режиме усиление узла УПЧ регулируемого обеспечивает необходимый динамический диапазон до сжатия сигнала, а усиление УПЧ-кво - необходимый уровень шума на выходе блока.
В фазовом режиме усиление узла УПЧ рег. уменьшается на 20 дБ, обеспечивая входной динамический диапазон.
Блок сжатия ЛЧМ имеет в каждом канале узел АРУ У8, в который входят плата «АРУ по сигналу» и плата «АРУ по шумам». По команде «+27В Помеха» плата «АРУ по сигналу» работает по шумовой помехе.
При переходе в режим работы " Помеха" в амплитудном режиме происходит уменьшение усиления в УПЧ рег на 20 дБ и, соответственно, увеличение усиления на 20 дБ в УПЧ-кво, тем самым увеличивая динамический диапазон до сжатия и сохраняя в каналах уровень шумов.
В блоке предусмотрена возможность ручной регулировки усиления (РРУ). РРУ включается по команде" +27В вкл. РРУ".
При подаче команды ВИДЕО КОМПЕНСАЦИЯ (ВК) I канал работает в режиме АРУш, а II в режиме РРУ.
При подаче команды СДЦ усиление УПЧ рег. уменьшается в 10 раз для увеличения динамического диапазона в режиме СДЦ, одновременно увеличивается усиление схемы АРУш с целью обеспечения одинакового уровня шумов на входе схемы АРУш в амплитудном и фазовом режиме.
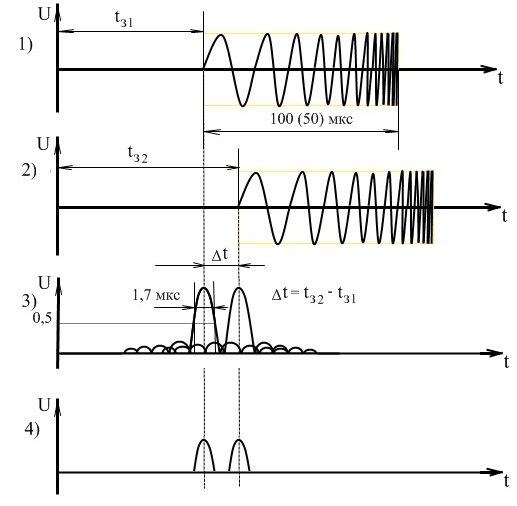
Рис.7
Таким образом, в РЛС 9S35М1, две цели будут различимы, если задержка между ними составляет более 1,7 мкс, что соответствует реальной дальности между целями менее 200 м.
В рассмотренной главе представлено решение одной проблемы связанной с повышением разрешения по дальности с использованием ЛЧМ сигнала. Оставаясь на сегодняшний день самой совершенной РЛС, она тем не менее, уступает по своим параметрам многофункциональным РЛС и прежде всего по возможности одновременной работы по нескольким целям.
2. Общие сведения о многофункциональных РЛС
2.1 Назначение и задачи решаемые МРЛС
Радиотехнические системы (РТС) с телеуправлением и самонаведением обладают определенными преимуществами и недостатками. РТС с телеуправлением обеспечивают управление объектами на любой дальности, но с увеличением дальности увеличиваются ошибки наведения.
РТС с самонаведением обеспечивают хорошую точность на конечных участках наведения, но по дальности действия ограничиваются возможностями бортовых координаторов.
Сочетание преимуществ различных способов управления позволяет получить РТС с комбинированным управлением (2).
Комбинированным управлением называется комбинация нескольких
способов управления полетом управляемого объекта.
Комбинирование может быть последовательным, параллельным, смешанным.
Наиболее перспективным является - смешанное комбинирование, так как оно наиболее полно использует все достоинства каждого способа на всех участках полета. Ограничивает применение, сложность аппаратуры.
Все преимущества и достоинства комбинированного способа управления не могут быть полно реализованы при размещении элементов системы управления РТС на различных объектах. Необходимо преимущества и достоинства комбинированного способа управления подкрепить уменьшением времени реакции, повышением уровня автоматизации всех процессов обработки информации (как радиолокационной, так и командной) управления радиотехнической системы.
Одним из известных направлений решения данной проблемы – это применение многофункциональных РЛС (МРЛС).
МРЛС в процессе функционирования обеспечивает выполнение всех задач от момента обнаружения целей, до их уничтожения с заданной эффективностью, а именно:
поиск, обнаружение, опознавание и определение координат всех целей;
анализ воздушной обстановки, точное определение координат сопровождаемых целей.
Для этого необходимо: