


Дифференциальные уравнения с разрывной правой частью
§1. Актуальность темы.
Актуальность данной темы в значительной степени обусловлена многочисленными приложениями теории дифференциальных уравнений с разрывными правыми частями.
Ряд процессов в механике, электротехнике и в других областях характеризуются тем, что правые части дифференциальных уравнений, которые описывают их динамику, претерпевают разрывы в зависимости от текущего состояния процесса. Стандартный пример такой динамической системы – механическая система с сухим трением, когда сила сопротивления может принимать одно из двух двух противоположных по знаку значений в зависимости от направления движения. Рассмотрим эту систему подробнее.
Механическая система с сухим трением.
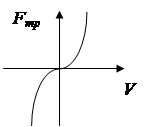
Как показано в (3) можно установить зависимость между работой, затраченной на преодоление сил трения и скоростью движения. Эта зависимость получается совершенно различной для случая движения груза массы mв жидкости и трения о какую-либо твердую поверхность. В первом случае (случай “жидкого трения”) работа существенно зависит от скорости и при уменьшении скорости уменьшается и может быть сделана как угодно малой. Во втором случае (случай “сухого трения”), наоборот, работа мало зависит от скорости, и как бы медленно ни двигали груз, необходимо затратить на его перемещение некоторую конечную и вполне определенную работу, т.е. сила трения даже при сколь угодно малой скорости имеет конечную величину. Кроме этого, учитывая, что сила трения всегда направлена в сторону, противоположную скорости, и, значит при переходе через нуль сила трения меняет знак на обратный, в случае “жидкого трения” получаем, что сила трения без скачка проходит через нуль и меняет при этом знак:
В случае же “сухого трения” при скорости, стремящейся к нулю, сила трения с двух сторон стремится к разным конечным пределам (в частности противоположным по знаку, но одинаковым по абсолютной величине), т.е. при нуле претерпевает разрыв:
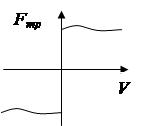
Т.о. математические модели механических систем с кулоновым трением, полученные в рамках механики систем абсолютно твердых тел, представляют собой дифференциальные уравнения, правые части которых являются функциями, разрывными относительно обобщенных скоростей (сила трения изменяется скачкообразно при изменении направления движения).
Ситуация, подобная вышеописанной, особенно часто возникает в системах автоматического управления: стремление повысить быстродействие системы, минимизировать энергетические затраты на управление, ограничить область возможных изменений регулируемых параметров и т.п. приводит к управляющим воздействиям в виде разрывных функций. В частности, такими системами автоматического управления являются системы с переменной стуктурой и со скользящими режимами.
Системы с переменной структурой и со скользящим режимом.
Исследование этих систем в большинстве случаев осуществляется на основе развитого в работе (3) метода фазового пространства. Согласно этому методу, состояние динамической системы ![]() –го порядка в любой момент времени полностью определяется значениями
–го порядка в любой момент времени полностью определяется значениями ![]() координат. Значения этих координат задают некоторую точку в
координат. Значения этих координат задают некоторую точку в ![]() –мерном пространстве, по осям которого отложены координаты системы. Т.о., каждому новому состоянию системы соответствуют все новые и новые точки пространства и изменению состояний системы можно соподчинить движение некоторой точки, которая называется изображающей точкой, а пространство – фазовым пространством. При движении системы ее координаты изменяются. И изображающая точка описывает некоторую кривую (выражающую для данного движения зависимость скорости от координат), которая называется фазовой траекторией. По виду этих траекторий можно судить о свойствах рассматриваемой динамической системы, и, более того, изменять их, деформируя фазовые траектории при соответствующем выборе управляющих воздействий. Движение изображающей точки характеризуется вектором фазовой скорости, который направлен по касательной к траектории в сторону движения.
–мерном пространстве, по осям которого отложены координаты системы. Т.о., каждому новому состоянию системы соответствуют все новые и новые точки пространства и изменению состояний системы можно соподчинить движение некоторой точки, которая называется изображающей точкой, а пространство – фазовым пространством. При движении системы ее координаты изменяются. И изображающая точка описывает некоторую кривую (выражающую для данного движения зависимость скорости от координат), которая называется фазовой траекторией. По виду этих траекторий можно судить о свойствах рассматриваемой динамической системы, и, более того, изменять их, деформируя фазовые траектории при соответствующем выборе управляющих воздействий. Движение изображающей точки характеризуется вектором фазовой скорости, который направлен по касательной к траектории в сторону движения.
Определение систем с переменной структурой дано в работе (13). Под системами с переменной структурой авторы понимают системы, в которых связи между функциональными элементами меняются тем или иным образом, в отличие от систем с фиксированной структурой, в которых совокупность функциональных элементов и характер связей между ними остаются неизменными.
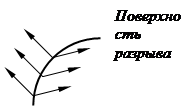
Одним из режимов работы таких систем является скользящий режим, характеризуемый бесконечной частотой переключения функции управления. Скользящий режим возникает, если в окрестности поверхности, на которой функция управления претерпевает разрывы, фазовые траектории направлены навстречу друг другу
После попадания на поверхность разрыва изображающая точка не может в течение любого даже сколь угодно малого, но конечного интервала времени двигаться по любой из траекторий, примыкающих к этой поверхности (при любом смещении всегда возникает движение, возвращающее изображающую точку на поверхность разрыва).
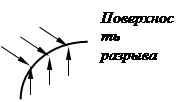
В (7) рассматривается еще случай, когда решение наоборот не может попасть на соответствующий участок поверхности разрыва (при возрастании времени):
Скользящие режимы обладают рядом привлекательных свойств с т.з. построения систем автоматического управления (часто скользящие режимы специально вводят в системы). Одна из особенностей, связанная с независимостью их от характеристик управляемого объекта и возможностью наделить их желаемыми свойствами, и обуславливает широкое применение скользящих движений.
Т.о., существование теории релейных систем, систем переменной структуры, реализация законов оптимального управления, механики, электротехники приводят к необходимости изучения общей теории диф. уравн. с разрывными правыми частями, для которых в общем случае неприемлемы методы классической теории дифференциальных уравнений.
§2. Обзор работ по теории дифференциальных уравнений с разрывными правыми частями.
Различным вопросам этой теории посвящены отдельные параграфы и главы в книгах (3,4,7,9), а также большое число журнальных статей.
Систематическое изложение этой теории имеется в статьях А.Ф. Филиппова. В (16) Филиппов рассмотрел диф. уравн. с однозначными разрывными правыми частями, ввел понятие решения и доказал основные теоремы качественной теории.
Различные направления исследования релейных диф. уравн. ![]() , т.е. таких уравнений, у которых правая часть не является ненпрерывной по x функций рассмотрены в статье (5).
, т.е. таких уравнений, у которых правая часть не является ненпрерывной по x функций рассмотрены в статье (5).
Теория систем автоматического управления, описываемых дифференциальными уравнениями с разрывными правыми частями рассматривается в книгах (13, 14, 15). В работе С.В. Емельянова (13) излагается один из разделов теории автоматичесеого управления – теория систем с переменной структурой, принадлежащих к классу нелинейных систем автоматического регулирования, в которых широко используются скользящие режимы. Скользящие режимы релейных систем изучались Ю.И Неймарком (10), Ю.И. Алимовым (2) и др. Но появление систем с переменной структурой породило интерес к теории скользящих режимов не только в релейных системах общего вида (14, 15). Содержание последних книг составляют проблемы, связанные с исследованием систем с разрывными управляющими воздействиями, в (14) приводится математический аппарат для исследования разрывных динамических систем, которые не рассматриваются в классической теории диф. уравнений. Обзор и основные направления теории диф. уравнений с разрвными правыми частями приводятся в книге (17), которая явилась основной при написании дипломной работы.
Во всех вышеперечисленных работах теория разрывных систем основывается на теории дифференциальных включений. Нами было сделано предположение, что эти системы можно свести к системам дифференциальных уравнений с импульсным воздействием, теория которых изложена в (12). Для этого потребуется дать определения решения, устойчивости решения разрывной системы в смысле системы с импульсным воздействием, сформулировать теорему об устойчивости нулевого решения.
Глава II
Определения решения дифференциального уравнения с разрывной правой частью.
Здесь из лагаются различные определения решений дифференциальных уравнений с разрывными правыми частями, устанавливается связь таких уравнений с дифференциальными включениями, указываются условия их применимости.
§1. Обоснование необходимости обобщения понятия
решения дифференциального уравнения.
Определение1. Решением дифференциального уравнения
 =
= 
с непрерывной правой частью называется функция  , которая всюду на данном интервале имеет производную и удовлетворяет этому уравнению.
, которая всюду на данном интервале имеет производную и удовлетворяет этому уравнению.
Для дифференциальных уравнений с разрывными правыми частями такое определение непригодно, как показывают следующие примеры.
Пример 1.
![]()
![]()
При ![]()
![]()
![]() =-1 и решение выражается формулой
=-1 и решение выражается формулой ![]() ;
;
 при
при 

 , решение
, решение  :
:
Исходя из требования непрерывности решения при ![]() :
:
x(0)=![]() ,
,
![]() . Поэтому решение выражается формулой
. Поэтому решение выражается формулой ![]() . При
. При ![]() производной
производной ![]() не существует.
не существует.
Пример 2.
![]()
![]()
При ![]()
![]() 3, решение
3, решение ![]() ,
,
при ![]()
![]() , решение
, решение ![]() :
:
 x
x
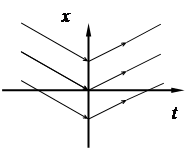
При возрастании ![]() каждое решение доходит до прямой
каждое решение доходит до прямой ![]() 0. Поле направлений не позволяет решению сойти с прямой
0. Поле направлений не позволяет решению сойти с прямой ![]() 0 ни вверх, ни вниз. Если же продолжить решение по этой прямой, то получаемая функция
0 ни вверх, ни вниз. Если же продолжить решение по этой прямой, то получаемая функция ![]() не удовлетворяет уравнению в обычном смысле, т.к. для нее
не удовлетворяет уравнению в обычном смысле, т.к. для нее![]() , а правая часть уравнения при
, а правая часть уравнения при ![]() равна 1-sign 0=1
равна 1-sign 0=1![]() 0.
0.
Кроме этого, уравнение с непрерывной правой частью равносильно интегральному уравнению
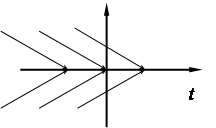
В случае, когда f(t,x) разрывна по t и непрерывна по x (пример 1), решением уравнения можно назвать функции, удовлетворяющие интегральному уравнению. В этом случае, решения с одной стороны от S подходят к S, а с другой стороны сходят с S (траектории “прошивают” поверхность):

S
Решение x(t) попадающее при ![]() на поверхность разрыва S, продолжается однозначно на значения
на поверхность разрыва S, продолжается однозначно на значения ![]() и близкие к
и близкие к ![]() ; пересекая S решение удовлетворяет уравнению всюду, кроме точки пересечения, в которой решение не имеет производной (в первом примере S– это прямая t=0).
; пересекая S решение удовлетворяет уравнению всюду, кроме точки пересечения, в которой решение не имеет производной (в первом примере S– это прямая t=0).
В другом случае, когда с обеих сторон поверхности разрыва S решения приближаются к S (траектории “стыкуются” – скользящий режим), это определение решения непригодно, т.к. ничего не говорит о том, как продолжится решение, попавшее на S (пример 2).
Необходимо поэтому было дать такое определение решения, которое охватило бы эти два основных случая и формулировалось бы независимо от расположения линий и поверхностей разрыва.
§2. Определения решения.
Рассмотрим уравнение или систему в векторной записи
![]() , (1)
, (1)
с кусочно-непрерывной функцией fв области G;![]() ,
, ![]() , M– множество (меры нуль) точек разрыва функции f.
, M– множество (меры нуль) точек разрыва функции f.
Большинство известных определений решения уравнения (1) могут быть изложены следующим образом. Для каждой точки ![]() области G указывается множество
области G указывается множество ![]() в -мерном пространстве. Если в точке (t,x) функция f непрерывна, то множество
в -мерном пространстве. Если в точке (t,x) функция f непрерывна, то множество ![]() состоит из одной точки, совпадающей со значением функции f в этой точке. Если же
состоит из одной точки, совпадающей со значением функции f в этой точке. Если же ![]() -точка разрыва функции f, то множество
-точка разрыва функции f, то множество ![]() задается тем или иным способом.
задается тем или иным способом.
Определение2.Решением уравнения (1) называется решение дифференциального включения
 , (2)
, (2)
т.е. абсолютно непрерывная вектор-функция x(t), определенная на интервале или отрезке I, для которого почти всюду на I
 .
.
Другими словами, решение дифференциального уравнения (1) определяется как функция, у которой производная ![]() может принимать любые значения из некоторого множества
может принимать любые значения из некоторого множества ![]() .
.
Иногда (2) называют диф. уравнением с многозначной правой частью. Функцию ![]() называют многозначной функцией, подчеркивая, что значение
называют многозначной функцией, подчеркивая, что значение![]() - множество. Если для всех (t, x) множество
- множество. Если для всех (t, x) множество![]() состоит из единственной точки, то (2) – обычное диф. уравнение. Функция
состоит из единственной точки, то (2) – обычное диф. уравнение. Функция ![]() называется однозначной в точке
называется однозначной в точке ![]() , если множество F
, если множество F![]() состоит из единственной точки.
состоит из единственной точки.
Одним из наиболее популярных определений решения разрывной системы является определение А.Ф. Филиппова.
А. Выпуклое доопределение.
Применимо, в частности, к системам с малым запаздыванием того или иного рода, а также к некоторым системам с сухим трением.
Для каждой точки ![]() пусть
пусть ![]() - наименьшее выпуклое замкнутое множество, содержащее все предельные значения вектор-функции
- наименьшее выпуклое замкнутое множество, содержащее все предельные значения вектор-функции![]() , когда
, когда ![]()
![]() Решением уравнения (1) называется решение включения (2) с только что построенным
Решением уравнения (1) называется решение включения (2) с только что построенным ![]() . Т.к.
. Т.к. ![]() - множество меры нуль, то при почти всех
- множество меры нуль, то при почти всех ![]() мера сечения множества
мера сечения множества ![]() плоскостью
плоскостью ![]() равна нулю. При таких
равна нулю. При таких ![]() множество
множество ![]() определено для всех
определено для всех ![]()
![]() . В точках непрерывности функции
. В точках непрерывности функции ![]() множество
множество ![]() состоит из одной точки
состоит из одной точки ![]() и решение удовлетворяет уравнению (1) в обычном смысле. Если же точка
и решение удовлетворяет уравнению (1) в обычном смысле. Если же точка ![]()
![]() лежит на границах сечений двух или нескольких областей
лежит на границах сечений двух или нескольких областей ![]() , …,
, …, ![]() плоскостью
плоскостью ![]() , то множество
, то множество ![]() есть отрезок, выпуклый многоугольник или многогранник с вершинами
есть отрезок, выпуклый многоугольник или многогранник с вершинами ![]()
![]() ,
, ![]() , где
, где
![]()
![]() =
= ![]()
![]() .
.
Все точки ![]()
![]() (
(![]() = 1, … ,
= 1, … , ![]() содержатся в
содержатся в ![]() , но не обязательно, чтобы все они являлись вершинами.
, но не обязательно, чтобы все они являлись вершинами.
Определение 3.
Вектор-функция ![]() , определенная на интервале
, определенная на интервале ![]() называется решением уравнения (1), если она абсолютно непрерывна и если при почти всех
называется решением уравнения (1), если она абсолютно непрерывна и если при почти всех ![]() для любого
для любого ![]() вектор
вектор ![]() принадлежит наименьшему выпуклому замкнутому множеству (
принадлежит наименьшему выпуклому замкнутому множеству (![]() -мерного пространства), содержащему все значения вектор-функции
-мерного пространства), содержащему все значения вектор-функции ![]() , когда
, когда ![]() пробегает почти всю
пробегает почти всю ![]() -окрестность точки
-окрестность точки ![]() в пространстве X (при фиксированном
в пространстве X (при фиксированном ![]() ), т.е. всю окрестность, кроме множества мера нуль.
), т.е. всю окрестность, кроме множества мера нуль.
Такое определение дает однозначное продолжение решения по поверхности разрыва.
Рассмотрим случай, когда функция ![]() разрывна на гладкой поверхности
разрывна на гладкой поверхности ![]() , задаваемой уравнением
, задаваемой уравнением ![]() . Поверхность S делит свою окрестность в пространстве на области
. Поверхность S делит свою окрестность в пространстве на области ![]() и
и ![]() . Пусть при
. Пусть при ![]() и приближении
и приближении ![]() к
к ![]() из областей
из областей ![]() и
и ![]() функция имеет предельные значения
функция имеет предельные значения
![]()
![]()
Тогда множество ![]() , о котором говорится в доопределении А, есть отрезок, соединяющий концы векторов
, о котором говорится в доопределении А, есть отрезок, соединяющий концы векторов ![]() и
и ![]() , проведенных из точки
, проведенных из точки ![]() .
.
aЕсли этот отрезок при ![]() лежит по одну сторону от плоскости
лежит по одну сторону от плоскости ![]() , касательной к поверхности
, касательной к поверхности ![]() в точке, то решения при этих
в точке, то решения при этих ![]() переходят с одной стороны поверхности
переходят с одной стороны поверхности ![]() на другую:
на другую:
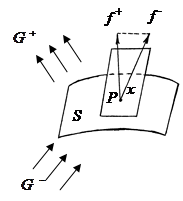
Рис. 1.
aЕсли этот отрезок пересекается с плоскостью ![]() , то точка пересечения является концом вектора
, то точка пересечения является концом вектора ![]() , определяющего скорость движения
, определяющего скорость движения
![]() (3)
(3)
по поверхности ![]() в пространстве
в пространстве ![]() :
:
|