


Динамічні процеси та теорія хаосу
Курсова робота на тему:
Динамічні процеси та теорія хаосу.
ПЛАН
Вступ
1. Відображення і потоки
1.1. Три образи хаосу
1.2. Аттрактор Лоренца і хаос в рідині
1.3. Універсальне відображення для нелінійних коливань
1.4. Стохастичні аттрактори
2. Хаотичні коливання
2.1. Перемежана і перехідний хаос
2.2. Консервативний хаос
3. Фізичні експерименти з хаотичними системами
3.1. Хаос в пружній безперервній середі
3.2. Тривимірні пружні стрижні і струни
3.3. Хаос в матричному друкуючому пристрої
3.4. Нелінійні ланцюги
4. Фрактальні властивості хаосу
4.1. Фрактали
4.2. Фрактали і хаос
Висновок
Список використаної літератури
Вступ
Для багатьох вивчення динаміки почалося і закінчилося другим законом Ньютона F = mA. Якщо задані сили, що діють між частками, а також початкові положення і швидкості часток, то за допомогою достатнього великого комп'ютера можна передбачити рух або розвиток системи для будь-якого скільки завгодно пізнього часу. Проте поява великих комп'ютерів і швидких комп'ютерів не привела до обіцяної нескінченної передбаченості в динаміці. Було виявлено що рух деяких дуже простих динамічних систем не завжди можна передбачити на великий інтервал часу. Такі рухи були названі хаотичними, і їх дослідження привабило в динаміку деякі нові математичні ідеї.
Побутове поняття хаосу дуже древньо і часто асоціюється з безладним або некерованим фізичним станом або поведінкою людей. Хаос лякає. Правда, завжди залишається надія дізнатися потаєні сили або причини цього хаосу або пояснити, чому виявляються непередбачуваними події, на вигляд випадкові.
Отже, основна мета даної роботи полягає у вивченні моделей хаосу.
1. Відображення і потоки
1.1 Три образи хаосу
Простим прикладом динамічної моделі, що виявляє хаотичну поведінку є логістичне рівняння, або рівняння зростання популяції:
xn + 1 = axn - bx2(1.1)
Перший член в правій частці описує зростання або народження, а нелінійний член ответствен за обмеження зростання, зв'язане, наприклад, з обмеженістю енергетичних або харчових ресурсів. Якщо нехтувати нелінійним членом ( = 0), то можна виписати явне вирішення лінійного рівняння, що виходить:
xn + 1 = axnxn =x0 an(1.2)
Це рішення стійке при | а | < 1 і нестійкий при | а | > 1 . У останньому випадку з лінійної теорії виходить нереалістичне передбачення необмеженого зростання.
Нелінійну модель (1.1) зазвичай переписують в безрозмірному вигляді
xn + 1 = _xn (1 – xn) (1.3)
При _ > 1 є дві точки рівноваги (тобто х = _х (1 - х)). Для з'ясування стійкості відображення х + 1 = f (х) слід обчислити величину нахилу | f’ (x) | у точці спокою. Якщо | f’ | > 1, точка спокою нестійка. При 1 < _ < 3 логістичне рівняння (1.3) має дві точки спокою: х = 0, (_ — 1) /_; при цьому початок координат — нестійка крапка, а друга точка спокою стійка.
Проте при _ = 3 нахил при x = (_ — 1)/ _ перевищує одиницю (f' = 2 - _) і обидві точки рівноваги стають нестійкими. При значеннях параметра _, увязнених між 3 і 4, це просте різницеве рівняння описує безліч багатоперіодичних і хаотичних рухів. При _ = 3 стає нестійким стаціонарне рішення, але залишається стійким бицикл або двоперіодична орбіта. Ця орбіта показана на мал. 1.1. Величинах xnповторюється через кожну ітерацію.
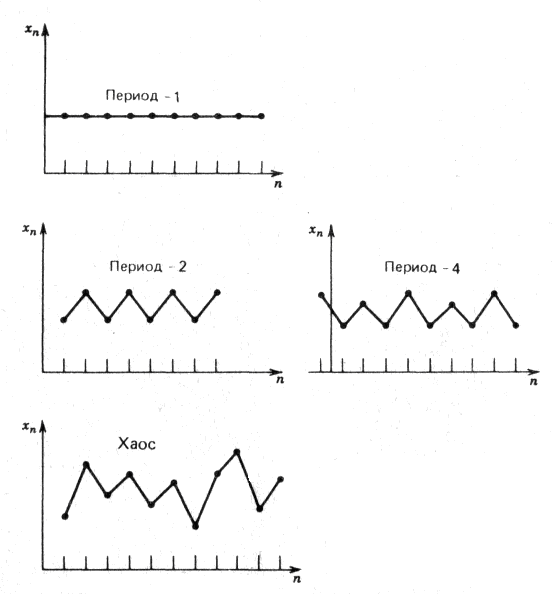
Рис 1.1. Можливі типи вирішень логістичного рівняння (1.3). Вгорі – стаціонарний рух з періодом 1; посередині - рух з періодом 2 і періодом 4; внизу – хаотичний рух.
При подальшому збільшенні _ двоперіодична орбіта стає нестійкою і виникає цикл з періодом 4, який унаслідок біфуркації швидко замінюється циклом з періодом 8 при ще більших значеннях _. Цей процес подвоєння періоду продовжується до тих пір, поки _ не досягає значення _: = 3,56994... . Поблизу цього значення послідовність значень параметра, при яких відбуваються подвоєння періоду, підкоряється точному закону
![]() (1.4)
(1.4)
Це граничне відношення називається числом Фейгенбаума — на ім'я фізики, який виявив ці властивості даного відображення.
При значеннях _, що перевищують _:, можуть виникати хаотичні ітерації, тобто поведінка моделі на великих часах не укладається в рамки простого періодичного руху. У інтервалі _:< _ < 4 також присутні певні вузькі інтервали s_, для яких існують періодичні орбіти. Хаотична орбіта логістичного відображення показана на мал. 2 за допомогою залежності х n+ 1 від хn.
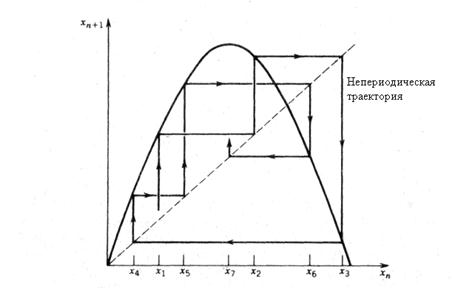
Рис. 1.2. Графічне вирішення різницевого рівняння першого порядку.
Роль цього відображення не лише в тому, що воно дає зразок хаосу. Було показано, що і інші відображення виду хп + 1 = f (xn), де f (x) — квадратична або складніша функція, поводяться приблизно так само, задовольняючи тому ж закону (1.4). Явище подвоєння періоду або регулярної зміни бифуркационного параметра називають універсальною властивістю певних класів одновимірних різницевих моделей динамічних процесів.
Подвоєння періоду і відношення Фейгенбаума (1.4) виявляються в багатьох фізичних експериментах. Це означає, що в багатьох безперервних еволюційних процесах зведення до різницевого рівняння за допомогою перетину Пумнкаре приводить до квадратичного відображення (1.1); звідси слідує важлива роль відображень в дослідженні диференціальних рівнянь.
1.2 Аттрактор Лоренца і хаос в рідині
У 1963 р. фахівець з фізики атмосфери на ім'я Е.Н. Лоренц з Массачусетсського технологічного інституту запропонував просту модель теплової конвекції в атмосфері. Рідина, що підігрівається знизу, легшає і спливає, а важча рідина опускається під дією гравітації. Такі рухи часто організовуються в конвективні валики, подібні до рухів рідини в тривимірному торі, показаному на рис. 1.3.
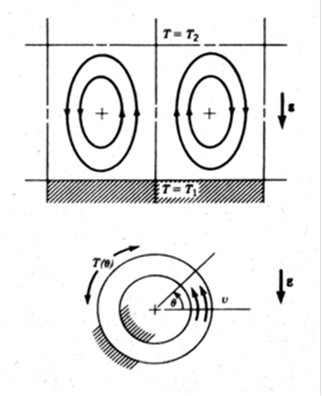
Рис. 1.3. Вгорі – схема ліній струму рідини в конвективному вічку при стаціонарному русі; внизу – одновимірна конвекція в кільцевій трубці під дією сили тяжіння і градієнта температури.
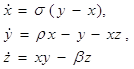
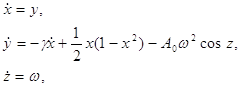
У математичній моделі конвекції, яку запропонував Лоренц, використовуються три змінні (х, біля, z), що описують стани системи. Змінна х пропорційна амплітуді швидкості, з якою рідина циркулює в рідкому кільці, а змінні біля і z відображають розподіл температури по кільцю. Так звані рівняння Лоренца можна формально отримати з рівняння Навьє — Стоксу, рівняння в приватних похідних механіки рідини. У безрозмірному виді рівняння Лоренца записуються таким чином:
 (1.5)
(1.5)
Параметри _ і ? пов'язані відповідно з числами Прандтля і Релея, а третій параметр d описує геометрію системи. Відзначимо, що єдині нелінійні члени — це хzі ху в другому і третьому рівняннях.
При _ = 10 і d = 8/3 (набір параметрів, що віддається перевага фахівцями в цій області) і при ? > 1 є три положення рівноваги, з яких те, яке розташоване на початку координат, є нестійкою седловой крапкою (рис. 1.4).
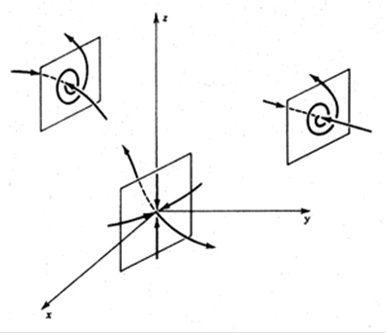
Рис 1.4. Локальні схеми руху поблизу трьох крапок рівноваги для рівнянь Лоренца (1.5).
1.3 Універсальне відображення для нелінійних коливань
Структура відображення. Рівняння ![]() (1.6), званий гамильтониан породжує рівняння руху
(1.6), званий гамильтониан породжує рівняння руху
 (1.7)
(1.7)
де необурена частота нелінійних коливань визначається вираженням
![]() (1.8)
(1.8)
Ці рівняння є диференціальними. Дискретна форма рівнянь руху у вигляді кінцевих різниць переважно для аналізу можливості появи стохастичності. Тому слід знатися на тому, як від рівнянь (1.7) перейти до їх різницевої форми і яка структура останніх.
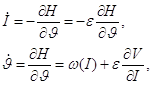
Допустимо, що виділена деяка послідовність моментів часу t0, t1, t2 ..., і систему (1.7) удається звести до дискретної системи
![]()
яка зв'язує значення змінних (I ?) в двох послідовних моментах часу. Зручно ці рівняння записати в такій формі:
 (1.9)
(1.9)
де індекс опущений, межа стоїть замість індексу + 1 і g1, g2 — функції, залежні від виду обурення. Надалі оператор (mod 2H) при фазі будемо, як правило, опускати.
Форма (1.9) є настільки спільною, що не містить ніякої інформації. У гамильтоновском випадку відображення (1.9) повинне зберігати міру, тобто повинна виконуватися умова
![]() (1.10)
(1.10)
Це означає, що
![]()
Для того, щоб система (1.9) знайшла який-небудь сенс, в неї слід вкласти фізичний зміст.
Хай змінна I є дією. Її зміна ![]() має бути пов'язане з деякою неадіабатичністю руху. У адіабатичному випадку, наприклад, sI експоненціально мало. У неадіабатичному випадку вважатимемо, що зміна дії в основному відбувається в деякій області часу st, в якій порушується адіабатична інваріантність. Повна зміна дії системи накопичується підсумовуванням різних окремих змін sI. Хай Т є характерний інтервал часу між двома послідовними областями порушення адіабатичної інваріантності. Це має на увазі нерівність
має бути пов'язане з деякою неадіабатичністю руху. У адіабатичному випадку, наприклад, sI експоненціально мало. У неадіабатичному випадку вважатимемо, що зміна дії в основному відбувається в деякій області часу st, в якій порушується адіабатична інваріантність. Повна зміна дії системи накопичується підсумовуванням різних окремих змін sI. Хай Т є характерний інтервал часу між двома послідовними областями порушення адіабатичної інваріантності. Це має на увазі нерівність
T > st (1.11)
яке відразу вирішує питання про те, як природним чином ввести відображення (1.9).
Якщо виконана умова (1.11), то існує природна структура відображення (1.9). Вона включає послідовність моментів {tk}, розділених інтервалами ~T між областями, де відбувається помітна зміна дії. Рівняння відображення виходять в результаті зшивання цих змін на двох послідовних інтервалах.
Вся відмінність в змінах дії поміщена у вигляді функцій g1, g2.
Ці прості міркування дозволяють без великих втрат виключити деякі непотрібні ускладнення. По-перше, вважатимемо, що st > 0, тобто зміна дії відбувається миттєво (удар). З фізичної точки зору це означає, що часовий інтервал st зміни дії менше всіх характерних часів завдання. По-друге, рахуватимемо інтервали T між моментами tk постійними.
Гамільтонін описаної системи може бути представлений в (, x) -пространстве у вигляді
![]() . (1.12)
. (1.12)
На осцилятор з гамильтонианом H0 (, x) діють миттєві поштовхи через постійні інтервали часу Т. Между поштовхами рух є вільним і передбачається відомим.
Тому зшивання рішень на двох різних інтервалах може бути проведена точно. Покажемо, як це лается.
Виведення відображення. Повернемося знову до змінних действие—угол:
![]() (1.13)
(1.13)
де V(I ?) виходить з V(х) заміною змінних. Рівняння руху (1.7) набирають вигляду
 (1.14)
(1.14)
Хай поштовх відбувається при деякому t = t0. Визначимо -отображение таким чином:
 (1.15)
(1.15)
Відображення ![]() виникає як послідовна дія удару
виникає як послідовна дія удару ![]() і вільного руху (обертання на торі)
і вільного руху (обертання на торі) ![]() :
:
![]() (1.16)
(1.16)
(Мал. 1.5). Маємо для
![]() (1.17)
(1.17)
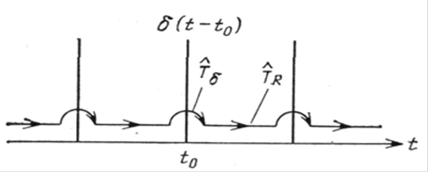
Рис. 1.5. Побудова універсального відображення.
Щоб отримати![]() , проінтегруємо систему (1.14) в малій околиці біля моменту поштовху (t0- 0, t0 + 0). Врахуємо при цьому, що змінна x безперервна. Тому в крапці t0 функція V(x)= V(I ?) безперервна. Маємо
, проінтегруємо систему (1.14) в малій околиці біля моменту поштовху (t0- 0, t0 + 0). Врахуємо при цьому, що змінна x безперервна. Тому в крапці t0 функція V(x)= V(I ?) безперервна. Маємо
 (1.18)
(1.18)
Рівняння (1.18) визначають ![]() :
:
![]() (1.19)
(1.19)
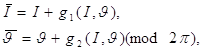
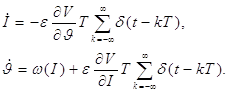
Підставляючи (1.17), (1.19) в (1.16), отримуємо рівняння (1.15) в явному вигляді:
 (1.20)
(1.20)
Це і є універсальне відображення. Воно допускає ще одне спрощення, якщо потенціал обурення залежить тільки від узагальненої координати ? і не залежить від імпульсу I. Тоді (1.20) перетворюється на наступне відображення:
![]() (1.21)
(1.21)
Остання модифікація пов'язана з вибором функції V(?). Це має бути періодична функція, і можна покласти V(?)= V0cos ?. Ще одне спрощення пов'язане з простим вибором функції ?(I): ? (I) = ?0 + ?’I. Це дає
 (1.22)
(1.22)
де позначено
![]() (1.23)
(1.23)
Рівняння (1.22) називають також стандартним відображенням зважаючи на його максимальну простоту.
Приведемо також вид гамильтониана, відповідного спрощеному відображенню (1.22):
![]() (1.24)
(1.24)
Лінійний член ?0I у гамильтониане H зникає при ?0 = 0. Квадратичний член по дії I при цьому залишається, оскільки через визначення (1.23) величина ??0 відмінна від нуля при ?0 = 0.
Структура фазового простору. Запишемо систему (1.22) в спрощеній формі, опустивши постійне зрушення фази ?0T і перейшовши до безрозмірної дії:
![]()
Отримуємо ![]() (1.25)
(1.25)
Нерухомі точки системи (1.25) знаходяться з рівнянь ![]() тобто
тобто
![]()
![]()
![]()
Звідси знаходимо особливі крапки
![]()
![]()
Точки r1є нестійкими крапками. Поведінка траєкторій поблизу них показує, що ці точки гіперболічного типа.
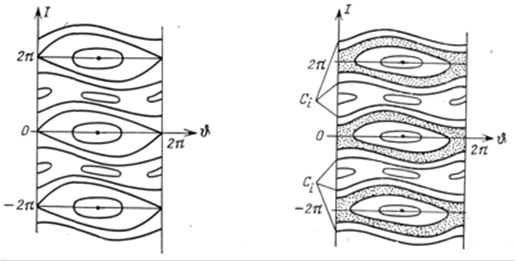
Рис. 1.6. Фазовий портрет стандартного відображення при малих значеннях K
Рис. 1.7. Фазовий портрет стандартного відображення при K : 1; Ci – інваріантні криві
Точки r2 є еліптичними, якщо К0 < 4. Фазовий портрет системи для малих K0приведений на мал. 1.6. Із зростанням К0 в системі відбуваються біфуркації народження кратних періодів, а при K0поблизу одиниці з'являється в околиці сепаратрисы широкий стохастичний шар (мал. 1.7). Різні стохастичні шари відокремлені один від одного інваріантними кривими, що існують унаслідок теореми Колмогорова—арнольда—мозера.
Стохастичне море. Подальше збільшення параметра K0приводить до руйнування КАМ-КРІВИХ і злиттю стохастичних шарів. Утворюється стохастичне море, в якому, проте, існують острівці стійкості (мал. 1.8). Острівці залишаються завжди при будь-яких скільки завгодно великих значеннях K0. Їх розмір в цьому випадку має порядок 1/K0, а відображення (1.25) із зростанням К0 стає все ближчим до У-системе.
Наявність острівців стійкості є фундаментальною властивістю реальних фізичних систем. Все сказане вище без зусиль переноситься на універсальне відображення (1.20), і відзнака виражається кінець кінцем лише у формі і числі острівців.
Сама структура острівців також є незвичайно складною заплутаною картиною. Існують системи острівців різних порядків розмірів, що все більш і більш зменшуються (мал. 1.9). Утворення стохастичного шару відбувається в околиці сепаратрисы при K0 < 0,97, а в області значень K0 > 0,97 відбувається злиття стохастичних шарів з утворенням спільного стохастичного моря. Таким чином, область переходу до хаосу є дуже вузькою.
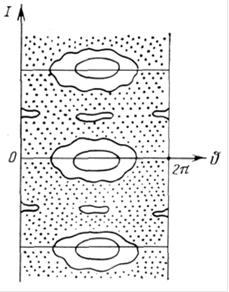
Рис. 1.8. Утворення стохастичного моря

Рис. 1.9. Острівці різних порядків в стохастичному морі. Окремі, безладно розташовані крапки належать одній траєкторії
У міру подальшого зростання параметра K0 > 1 стохастичне море заповнює все велику частку фазового простору. В той же час острівці стійкості зменшуються в своїх розмірах. Одночасно зменшується і відносна міра острівців.
1.4 Стохастичні аттрактори
Відзначимо деякі істотні сторони появи стохастичності в негамильтоновских диссипативних системах. Існування дисипації приводить до зменшення фазового об'єму системи.
Фінітность руху. Наступне нижче зауваження перш за все відноситься до поняття локальної нестійкості. Очевидно, що поява цієї нестійкості формулюється настільки універсальним способом, що він не пов'язаний з конкретним детальним видом динамічної системи.
Хай, наприклад, рівняння руху має тривіальний вигляд:
![]()
![]() (1.26)
(1.26)
Його рішення
![]()
![]()
показує відразу нестійкість щодо обурень початкової умови:
![]() (1.27)
(1.27)
З іншого боку, очевидно, що, не дивлячись на властивість (1.27), ніякої стохастичності в системі (1.26) не немає. Парадокс пов'язаний з тим, що система (1.26) здійснює инфинитное рух, в якому траєкторії можуть розходитися достатньо далеко і достатньо швидко із-за необмеженості фазового простору.
Ситуація змінюється, якщо замість (1.26) розгледіти систему, фазовий простір якого фінітного
![]()
![]()
![]() (1.28)
(1.28)
Тут є стохастичність при K > 1. Дуже важлива умова, що накладається на розглядувані далі системи, — финитность їх динаміки у фазовому просторі. Цього зауваження набуває глибший сенс для диссипативних систем, де осциляторна динаміка може бути взагалі відсутньою. Зокрема, характеристичні показники можуть не мати уявної частки ні при яких реальних значеннях параметрів.
Аттрактори і репеллери. Порівняльний аналіз особливостей на фазовій плоскості для гамильтоновских і диссипативних систем якнайкращим способом представляє їх відмінність. Структура фазового простору в диссипативному випадку набагато багатша, і тому тут слід чекати різноманітнішу динаміку систем.
Однією з відмітних властивостей диссипативних систем є існування аттракторов і репеллеров. Під «аттрактором» розуміється будь-яка притягуюча безліч. Прикладами аттракторов можуть бути стійкий фокус, стійкий граничний цикл. «Репеллером» є відштовхуюча безліч крапок. Такою властивістю володіють, наприклад, нестійкий фокус і нестійкий граничний цикл. При t > : фазові траєкторії все ближче наближаються до аттрактору. Система наближається до деякого сталого режиму, точки якого належать безлічі А+, що є аттрактором. Аттрактор є інваріантна безліч, тобто
![]()
Репеллер легко зрозуміти, якщо представити його як аттрактор А-, до якого прагнуть фазові траєкторії при t > -. Він також є інваріантним безліччю:
![]()
Стохастичний аттрактор. На перший погляд здається, що існування аттракторов виключає можливість стохастичної динаміки у фазовому просторі, оскільки з часом відстань між крапками фазової траєкторії і точками безлічі А+ повинно прагнути до нуля. Тому з часом траєкторія все більше наближається до крапки або циклу, в структурі яких немає нічого випадкового. Природа, проте, розпорядилася інакше.
Існує притягуюча безліч, сама структура якої є дуже складною. Її не просто описати, але можна вказати її головну особливість. Динаміка крапки на такій структурі в будь-якому можливому для аналізу сенсі є випадковою подібно до того, як це має місце в гамильтоновских системах. Така притягуюча безліч, на якій реалізується стохастична динаміка, називатимемо стохастичним аттрактором. У поняття стохастичності вкладаються, по суті, ті ж не дуже строго певні поняття, що апелюють швидше до фізичного сенсу, чим до строгого визначення. Перерахуємо їх.
1. Система здійснює фінітний рух.
2. У кінцевій області фазового простору є локальна нестійкість. Розгледимо цей пункт докладніше.
У гамильтоновских системах траєкторія достатньо швидко заповнювала весь фазовий простір унаслідок ергодичності і перемішування. Тепер ці поняття представляються анахронізмом, оскільки траєкторія притягується до деякої безлічі As, яка не лише є частка фазового простору, але і може мати нульову міру. Можна, проте, вчинити таким чином. Скористаємося інваріантністю As
![]() (1.29)
(1.29)
і тим, що через деякий не дуже великий час точки фазової траєкторії дуже близькі до точок As. Тому поняття локальної нестійкості можна ввести не у фазовому просторі Г, а в ![]() :
:
![]()
![]() (1.30)
(1.30)
тут індекс Asпри D означає, що відстань D береться між двома траєкторіями, початкові точки яких належать As.
Наступне важливе зауваження дозволяє зняти індекс As (1.30). Якщо t0не дуже мало, то відзнака положення точок реальної траєкторії від положення відповідних точок Asмало. Їм можна нехтувати, і тому расходимость траєкторій згідно із законом
![]()
![]() (1.31)
(1.31)
відбуватиметься для будь-якої пари крапок в деякій області фазового простору кінцевої міри, якщо тільки виконана важлива нерівність
![]() (1.32)
(1.32)
Доказ існування часу ![]() може виявитися достатньо складним для реальних систем, хоча сам факт його існування може представлятися цілком очевидним.
може виявитися достатньо складним для реальних систем, хоча сам факт його існування може представлятися цілком очевидним.
3. Існують змінні z такі, що розчіпляється корелятор
 (1.33)
(1.33)
де f і g - деякі інтегровані функції і
 (1.34)
(1.34)
Так само, як і при переході від (1.30) до (1.31), нерівність (1.32) дозволяє зняти індекс Asу формулах (1.33) і (1.34). Тоді їх вигляд нічим не відрізняється від визначень в гамильтоновском випадку, якщо замінити dAs(z) на dГ(z) в (1.34).
Властивість (1.34) означає існування процесу перемішування, який, проте, реалізується тепер не на всьому фазовому просторі, а на деякій безлічі As. Виправданням цьому є те, що при виконанні нерівності (1.32) відзнака області, фазовою траєкторією, що покривається, від Asмало.
2. Хаотичні коливання
2.1 Перемежана і перехідний хаос
Двома іншими формами непередбачуваних, нерегулярних рухів є перемежана і перехідний хаос. В разі перемежаної сплески хаотичного руху, або шуму, чергуються з періодами регулярного руху (рис. 2.1).
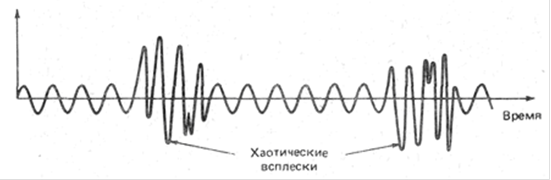
Рис. 2.1. Переміжний хаотичний рух.
Таку поведінку спостерігав ще Рейнольдс в своїх експериментах по вивченню передтурбулентного режиму в трубах (1883 р.). Перехідний хаос спостерігається також в деяких системах як передвісник стаціонарного хаосу. За певних початкових умов система може поводитися квазівипадковим чином, тобто її траєкторії можуть рухатися у фазовому просторі, неначебто вони знаходилися на дивному аттракторе, але через деякий час рух виходить на регулярний аттрактор, як в разі періодичних коливань. Інколи для експериментального визначення критичного параметра для перемежаної і перехідного хаосу використовуються властивості подібності нелінійного руху. В разі перемежаної, коли поведінка системи близька до періодичного руху, але час від часу зазнає короткі сплески перехідного хаосу, пояснення такої поведінки в термінах одновимірних відображень, або різницевих рівнянь, була дане Манневілем і Помо.
Як показали чисельні експерименти з відображеннями, середня тривалість періодичного руху <@> між двома послідовними хаотичними сплесками складає величину
![]() (2.1)
(2.1)
де _ - параметр (наприклад, швидкість рідини, амплітуда сили, що вимушує, або напруга, що вимушує), що управляє _с — критичне значення параметра _, при якому виникає хаотичний рух. Із збільшенням настроєння _ - _с тривалість хаотичного інтервалу збільшується, а тривалість періодичного інтервалу скорочується. Таке явище можна було б назвати повзучим хаосом.
Для експериментального визначення параметра _с необхідно зміряти два середні часи, <@>, і <@>2, при відповідних значеннях параметра, що управляє _1 і _2. Це дозволить опреде-шть коефіцієнт пропорційності в співвідношенні (2.1), а також величину _с. Але, встановивши «кандидата» в _с, необхідно потім зміряти інші значення (<@> _), щоб підтвердити закон подібності (2.1).
Випадок перехідного хаосу був досліджений Гребоги і ін. з Університету штату Меріленд в серії робіт по чисельних експериментах з двовимірними відображеннями. У роботах ці автори розгледіли двовимірне узагальнення одновимірного квадратичного різницевого рівняння, що отримало назву «Відображення Енона»:
де J — визначник якобиана, службовець коефіцієнтом стискування майданів при відображенні. У дослідженнях мэрилендской групи коефіцієнт J був вибраний рівним -0,3, а параметр ? варіювався в певних межах. Наприклад, при ? > ?0 = 1,062371838 спостерігалося народження з траєкторій з періодом 6, дивного аттрактора, що складається з 6 окремих часток, який існує в діапазоні ?0 < ? < ?c = 1,080744879
При ? > ? з траєкторія при ітераціях відображення Енона блукає навколо «примари» дивного аттрактора на плоскості; після чого в системі встановлюється періодичний режим з періодом 4.
Гребоги і ін. виявили, що середня тривалість <@> перехідного хаосу задовольняє закону подібності
![]() (2.2)
(2.2)
Середнє було знайдене шляхом вибору 102 початкових умов при кожному виборі ?. Початкові умови вибиралися в первинній області тяжіння дивного аттрактора, що припинив існування. Тривалість таких перехідних хаотичних режимів може бути дуже велика. Наприклад, в разі відображення Енона Гребоги і його співробітники виявили, що <@> : 104 при і <@> : 103 при![]() .
.
Та ж група дослідників виявила відображення, що породжують суперперехідний хаос, в якому тривалість перехідного періоду задовольняє закону подібності
![]() . (2.3)
. (2.3)
Ці результати дозволяють передбачити, що час життя деяких перехідних хаотичних режимів може перевершувати тривалість будь-якого експерименту. Математика, що зачіпає в цих дослідженнях, пов'язана з гомоклиническими точками перетину стійкого і нестійкого многообразий при відображеннях. Виникнення гомоклинических точок перетину мэрилендская група називає кризами.
2.2 Консервативний хаос
Хоча останнім часом активність в області нелінійної динаміки пов'язана переважно з хаосом в диссипативних системах, вже чималий час відома можливість хаотичної поведінки в бездиссипативных, або так званих консервативних, системах. По суті справи, саме пошук вирішень рівнянь небесної механіки привів в кінці XIX ст деяких математиків, наприклад Пумнкаре, до припущення, що вирішення багатьох завдань динаміки чутливі до початкових умов і тому деталі руху тіл по орбітах виявляються непередбачуваними.
Фізичні приклади консервативних систем пов'язані з проблемами розрахунку орбіт в небесній механіці і поведінки часток в електромагнітних полях. Зрозуміло тому, що велика частка роботи в цій області була виконана тими, хто займається фізикою плазми, астрономією і астрофізикою.
Хоча в більшості земних динамічних систем відбуваються деякі втрати енергії, в деяких з них, як, наприклад, в структурованих конструкціях або мікрохвильових резонаторах, загасання дуже слабо, і на кінцевих інтервалах часу вони можуть поводитися як консервативні або гамильтоновы системи. Як приклад можна привести технологічну конструкцію, що знаходиться на навколоземній орбіті. Крім того, динаміка консервативних систем є граничним випадком динамічного аналізу при слабкому загасанні.
Системи, в яких зберігається енергія, в типових випадках виявляють тих же типів обмежених коливальних рухів, що і системи з втратами. До таких рухів належать періодичні, субгармонійні, квазіперіодичні і хаотичні. Одна з основних відзнак між коливаннями в системах з втратами і без них полягає в тому, що хаотичні орбіти в системах з втратами виявляють фрактальну структуру фазових портретів, тоді як в бездиссипативных системах така структура відсутня.
У консервативних системах хаотичні орбіти прагнуть однорідно заповнити всі частки деякого підпростору у фазовому просторі; іншими словами, вони характеризуються однорідною щільністю вірогідності в обмежених областях фазового простору. Тому бездиссипативные системи мають інші відображення Пумнкаре, чим системи з дисипацією. Проте як і раніше застосовна така міра розбіжності близьких орбіт, як показники Ляпунова. Прикладом бездиссипативной системи є кулька, що підскакує на пружному столі, причому стіл рухається і передбачається, що при зіткненнях не втрачається енергія, тобто вони упруги.
3. Фізичні експерименти з хаотичними системами
3.1 Хаос в пружній безперервній середі
Ф. Мун досліджував проблеми двох типів. У завданнях одного класу рівняння в приватних похідних, що описує рух стрижня, лінійно, але нелінійні масові сили або граничні умови. У інших завданнях руху достатньо сильні, щоб в рівняннях руху стали істотними нелінійні члени.
При малих вигинах і відхиленнях рівняння руху пружного стрижня має вигляд
![]() (3.1)
(3.1)
де ? — поперечний зсув стрижня, D — коефіцієнт пружної жорсткості, а m — маса на одиницю довжини. Права частка рівняння описує розподілені масові сили або внутрішнє загасання. У багатьох дослідах для створення нелінійних масових сил використовувалися постійні магніти.
Коли зсув і нахил осі стрижня великі, горизонтальний і вертикальний зсув і нахил характеризуються змінними (u ?, T), зв'язаними співвідношеннями
![]() (3.2)
(3.2)
де ( )' = }/}s, а s — довжина, вимірювана уздовж деформованого стрижня (рис. 3.1).
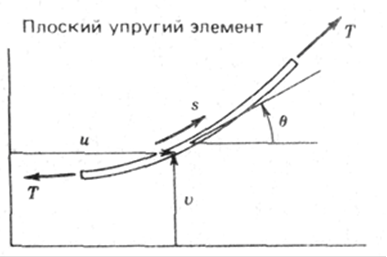
Рис. 3.1. Плоска деформація пружного стрижня.
Тоді рівняння збереження імпульсу набувають вигляду
![]() (3.3)
(3.3)
Де ![]()
У цих рівняннях (fu, f?) — компоненти масової сили, а T — осьова сила, що створює напругу в стрижні. Нелінійні члени відрізняються від характерних для механіки рідин тим, що сюди не входять переносні, або кінематичні, нелінійності. Крім того, локальна залежність напруги від деформації лінійна. Нелінійні члени виникають із-за зміни геометричної форми і називаються геометричними нелинейностями.
Магнітопружний зігнутий стрижень. Пружний стрижень, закріплений з одного боку, згинається магнітами, які поміщені поблизу його вільного кінця. Магнітні сили роблять нестійким прямий, незігнутий стан стрижня і створюють декілька положень рівноваги, одне з яких показане на мал. 3.2а. Після того, як такий вигин створений, система аналогічна частці в потенціалі з двох або більш за ями. Весь пристрій поміщається на вібростенд і коливається з постійною амплітудою і частотою. При слабких коливаннях стрижень залишається поблизу одного з положень рівноваги. Проте із зростанням амплітуди стрижень може вискочити з потенційної ями і зачинаються хаотичні рухи, при яких стрижень переходить з однієї ями в іншу. Відображення Пумнкаре для цього процесу показане на мал. 3.2б. (це відображення називається «Квіткою Пумнкаре».)
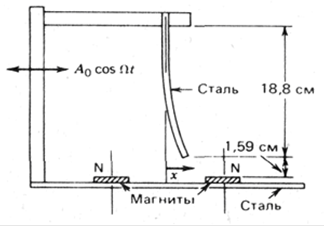
Рис. 3.2а. Пружний сталевий стрижень, зігнутий магнітними масовими силами і прикріплений до періодично рухомої підстави.

Рис. 3.2б. Отримане в експерименті відображення Пумнкаре для хаотичного руху стрижня, подовжньо зігнутого магнітними силами («квітка Пумнкаре»).
Для опису цієї системи використовується багатомодове наближення рівняння (3.1), в якому враховані нелінійні магнітний сили, що діють на вільний кінець стрижня.
Для стрижня із загасанням, закріпленого з одного боку, добрі результати дає одномодове наближення. Відповідне рівняння можна записати у вигляді системи трьох рівнянь першого порядку. Тут змінна x є безрозмірною амплітудою гармоніки:
 (3.4)
(3.4)
Відображення Пумнкаре (рис. 3.2б) має вигляд, характерний для двовимірних точкових відображень. У типових випадках експерименти не виявили подвоєнь періоду перед переходом до хаотичного руху. Передвісниками хаосу часто виявлялися непарні субгармоніки.
Видозміною цього експерименту є перевернутий маятник з пружиною. Якщо пружина слабка, то, як і в завданнях з двома потенційними ямами, перевернутий маятник має два положення стійкої рівноваги.
Зігнутий стрижень з двома мірами свободи. Щоб вивчити роль додаткових мір свободи, був створений пружний аналог сферичного маятника, в якому використаний стрижень кругового перетину. Для вигинання стрижня як і раніше використовувалися магніти, але тепер його кінець міг рухатися в двох напрямах. В результаті з'явилися несумірні природні частоти і квазіперіодичні коливання, які врешті-решт перетворилися на хаотичних (рис. 3.3).
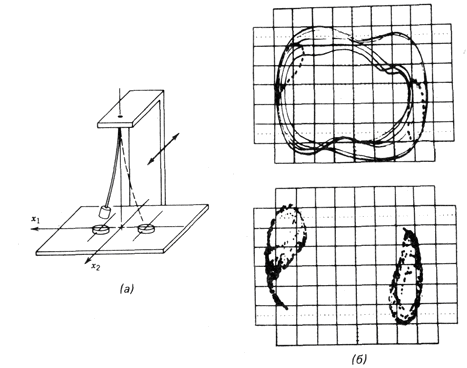
Рис. 3.3. а – Схема пружної лозини, що здійснює тривимірні рухи в парі потенційних ям, створених двома магнітами; б – накладені один на одного траєкторія руху у фазовому просторі і відображення Пумнкаре для квазіперіодичного руху (вгорі); відображення Пумнкаре для хаотичного руху (внизу).
Ета експериментальна модель описується рівняннями для двох зв'язаних осциляторів:
![]() (3.5а)
(3.5а)
![]() (3.5б)
(3.5б)
Члени f0і f2описують дію тяжіння, якщо початкове положення стрижня не вертикально, а члени, що зв'язують ці рівняння, потенційні. Якщо зв'язок слабкий, можна вирішити рівняння (3.5б) відносно біля(t), і рівняння для х(t) набуває вигляду рівняння параметричних коливань.
Пружний стрижень з нелінійними граничними умовами. Для того, щоб отримати хаотичні коливання в механічній системі, не обов'язково мати декілька положень рівноваги. Будь-яка сильна нелінійність також, швидше за все, викличе хаотичний шум при періодичній зовнішній дії. Одним з прикладів системи з одним положенням рівноваги є пружний стрижень з нелінійними граничними умовами. Нелінійними називаються такі граничні умови, які залежать від руху. Наприклад, передбачимо, що кінець стрижня може вільно рухатися в одному напрямі, а рух в іншому напрямі заборонений. Хаотична поведінка такого стрижня показана на рис. 3.4. Модифікацією цього прикладу є двостороннє обмеження із зазором, при якому вигин стрижня може відбуватися в трьох різних режимах.
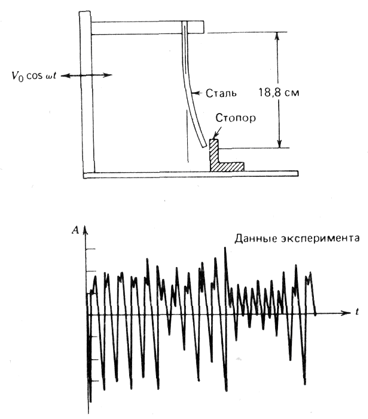
Рис. 3.4. Хаотичні коливання пружного стрижня з нелінійною граничною умовою.
3.2 Тривимірні пружні стрижні і струни
За певних умов вимушений плоский рух нелінійного пружного стрижня (балки, смужки) описуваний рівнянням (3.3), стає нестійким і виникають тривимірні рухи. Схоже явище відоме і для плоского руху натягнутої струни. Було проведено декілька експериментів з товщиномірами — дуже тонкими, гнучкими, пружними сталевими стрижнями прямокутного перетину (наприклад, 0,25 мм x 10 мм x 20 см) (мал. 3.5). Їх слабкий бічний рух (по відношенню до незігнутого стрижня) майже неможливий без подовжнього вигину або перекосу локальних поперечних перетинів. Проте при сильному вигині в «дозволеному» напрямі стають можливими і бічні зсуви, що супроводяться перекосом поперечних перетинів.
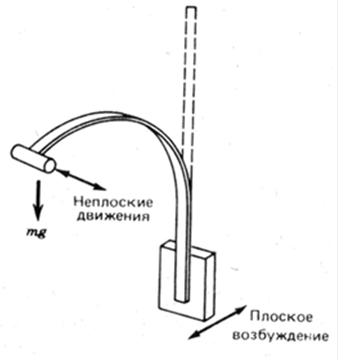
Рис. 3.5. Схема пружної структури, що здійснює руху як в плоскості коливання, що вимушує, так і в ортогональному напрямі
Плоскі коливання стрижня в «дозволеному» напрямі на частоті, близькій до однієї з багатьох власних частот, стають не лише нестійкими, але і хаотичними. Це видно з мал. 3.6, де в спектрі потужності отриманому швидким перетворенням Фурье, присутній широкий діапазон частот, тоді як зовнішнє збудження відбувається на одній частоті. Схожі явища відбуваються з дуже тонкими листками паперу. Хаотичні рухи дуже тонких листків пап