


Выбор электродвигателя по мощности и скорости
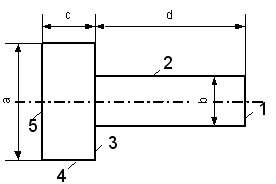
Наибольший диаметр обрабатываемой детали, (мм) ![]()
Наименьший диаметр обрабатываемой детали, (мм) ![]()
Длина первого перехода, (мм) ![]()
Длина второго перехода, (мм) ![]()
Скорость резания первого перехода, (м/мин) ![]()
Скорость резания второго перехода, (м/мин) ![]()
Скорость резания третьего перехода, (м/мин) ![]()
Скорость резания четвертого перехода, (м/мин) ![]()
Скорость резания пятого перехода, (м/мин) ![]()
Усилие резания первого перехода, (Н) ![]()
Усилие резания второго перехода, (Н) ![]()
Скорость резания третьего перехода, (м/мин) ![]()
Скорость резания четвертого перехода, (м/мин) ![]()
Скорость резания пятого перехода, (м/мин) ![]()
Передаточное число 1 коробки скоростей ![]()
Передаточное число 2 коробки скоростей ![]()
Момент инерции коробки скоростей, (![]() )
) ![]()
Тип электродвигателя: АД (асинхронный двигатель):
Способ торможения: ДТ (динамическое торможение):
Статическая нагрузочная диаграмма электропривода
Определим мощности резания для каждого перехода:
![]() ,
,
где i =1..5 — номер перехода;
FZi — сила резания для каждого перехода;
Vi — скорость резания для каждого перехода.
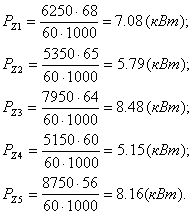
Максимальная мощность резания
![]() =8.48 кВт
=8.48 кВт
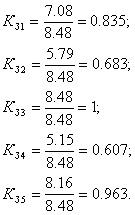
Коэффициент загрузки:
![]() ;
;
КПД для каждого перехода:
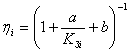 ;
;
![]()
Мощность на валу двигателя для каждого перехода:
![]() ;
;
![]()
![]()
![]()
![]()
![]()
Мощность потерь в станке при холостом ходе:
![]() ;
;
![]()
Частоты вращения шпинделя для каждого перехода:
![]() ,
,
где d — диаметр обрабатываемой детали (при отрезке, подрезке принимается наибольшим), мм.
![]()
![]()
![]()
![]()
![]()
Машинное (рабочее) время для каждого перехода:
![]() ,
,
где l — длина перехода, мм.
Определим длины переходов:
Определим подачу на переходах (принимается самостоятельно (1..6) мм):
S1 := 1;
S2 := 2;
S3 := 4;
S4 := 4;
S5 := 5;
Определим машинное (рабочее) время для каждого перехода:
![]()
![]()
![]()
![]()
![]()
Время паузы при работе станка tпо (время на установку детали, промер при точении, снятие детали, управление станком) принимаем равным 0,6 мин.
Время паузы равномерно распределяется между рабочими операциями:
![]() ;
;
![]()
Таким образом, статическая нагрузочная диаграмма будет состоять из следующих участков: технологическая пауза (![]() ), рабочий участок (
), рабочий участок (![]() ), технологическая пауза (
), технологическая пауза (![]() ), рабочий участок (
), рабочий участок (![]() ),технологическая пауза (
),технологическая пауза (![]() ), рабочий участок (
), рабочий участок (![]() ),технологическая пауза (
),технологическая пауза (![]() ), рабочий участок (
), рабочий участок (![]() ),технологическая пауза (
),технологическая пауза (![]() ), рабочий участок (
), рабочий участок (![]() ), технологическая пауза (
), технологическая пауза (![]() ).
).
Время всего цикла:

Статическая нагрузочная диаграмма приведена на рисунке 1.1.
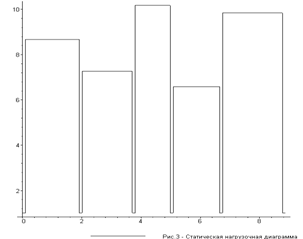
Рисунок 1.1 — Статическая нагрузочная диаграмма
электропривод загрузка мощность вал
Предварительный выбор электродвигателя по мощности и скорости
Из статической нагрузочной диаграммы определим среднеквадратичную мощность:
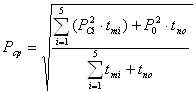 ;
;
![]()
Условие предварительного выбора двигателя по мощности:
![]()
Предварительно выбираем двигатель 4A132M2У3 с параметрами:
Номинальная мощность, (кВт): Pn := 11;
Номинальное напряжение, (В): Un := 380;
Частота питающего напряжения, (Гц): f1 := 50;
Синхронная частота, (мин^(-1)): nc := 3000;
Номинальная (асинхронная) частота, (мин^(-1)): nn := 2900;
Ток на роторе, (А): In :=21.20;
Момент инерции, (кг*м^2): Jdv := 0.023;
Коэффициент сдвига фаз: cosfi := 0.9;
КПД двигателя: nu_dv := 0.88;
Коэффициент перегрузки двигателя (Mmax / Mном): Kp := 2.8;
Номинальное скольжение: Sn := 0.023;
Масса двигателя, (кг): m_dv := 93;
Проверим выбранный двигатель по мощности:
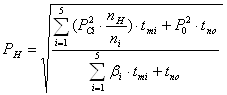 ,
,
где nн — номинальная частота вращения вала двигателя;
![]() — коэффициент ухудшения теплоотдачи на i-м переходе.
— коэффициент ухудшения теплоотдачи на i-м переходе.
![]() ,
,
где ![]() — коэффициент ухудшения теплоотдачи при неподвижном якоре.
— коэффициент ухудшения теплоотдачи при неподвижном якоре.
![]()
![]()
![]()
![]()
![]()
![]()
Условие ![]() выполняется, значит двигатель выбран правильно.
выполняется, значит двигатель выбран правильно.
Динамическая нагрузочная диаграмма электропривода
При построении динамической нагрузочной диаграммы необходимо учитывать, что вращающий момент и скорость на валу двигателя мгновенно изменится не могут. Время переходного процесса изменения скорости от ![]() до
до ![]() в начале и конце каждого перехода:
в начале и конце каждого перехода:
![]() ,
,
где ![]() — угловая скорость вращения вала двигателя в начале переходного процесса, с-1;
— угловая скорость вращения вала двигателя в начале переходного процесса, с-1;
![]() ,
,
где ![]() — скорость идеального холостого хода.
— скорость идеального холостого хода.
 ,
,
где ![]() — номинальная скорость двигателя, с-1;
— номинальная скорость двигателя, с-1;
![]() ;
;
![]() .
.
UH — номинальное напряжение, В;
IН — номинальный ток, А;
![]() ;
;
![]() .
.
rЯ — сопротивление якоря, Ом.
![]() .
.
![]() .
.
![]() — угловая скорость вращения вала двигателя в конце переходного процесса, с-1;
— угловая скорость вращения вала двигателя в конце переходного процесса, с-1;
![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]() — вращающий момент двигателя в начале переходного процесса, Н·м;
— вращающий момент двигателя в начале переходного процесса, Н·м;
![]() ;
;
![]() =3.24 Н·м
=3.24 Н·м
![]() — вращающий момент двигателя в конце переходного процесса, Н·м;
— вращающий момент двигателя в конце переходного процесса, Н·м;
![]() ;
;
![]()
![]()
![]()
![]()
![]()
J — приведенный к валу двигателя момент инерции, кг·м2.
![]() ,
,
где KJ — коэффициент, учитывающий моменты инерции масс деталей, вращающихся медленнее, чем вал двигателя: для привода с механическим регулированием скорости KJ =1,3;
Jд — момент инерции ротора двигателя по паспортным данным;
Jм=0.0069
Jд =0,023 кг·м2.
![]()
![]()
![]()
![]()
![]()
![]()
Время технологических пауз с учетом времени переходных процессов:
![]()
![]()
Динамические нагрузочные диаграммы приведены на рисунках 1.3, 1.4 и 1.5.
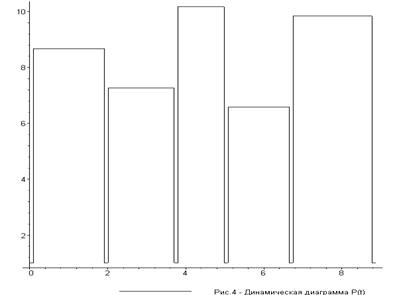
Рисунок 1.3 — Динамическая нагрузочная диаграмма (мощности)
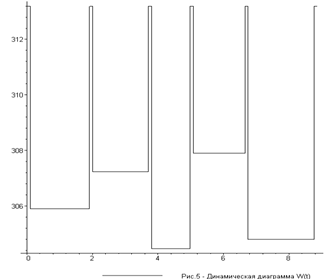
Рисунок 1.4 — Динамическая нагрузочная диаграмма (моменты)
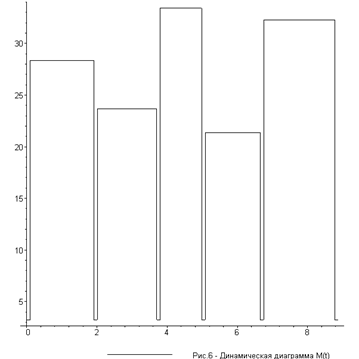
Рисунок 1.5 — Динамическая нагрузочная диаграмма (скорости)
Проверочный расчет электродвигателя по нагреву
Эквивалентную мощность при электрическом способе регулирования скорости найдем как
 ,
,
где ![]() ,
,
![]() .
.
![]() — время переходного процесса при максимальном перепаде скоростей;
— время переходного процесса при максимальном перепаде скоростей;
 ,
,
где ![]() — пусковой момент;
— пусковой момент;
![]() =36,22 (
=36,22 (![]() )
)
![]()
![]() .
.
![]()
![]() — средняя мощность потерь в электродвигателе за время переходного процесса для каждого перехода, Вт;
— средняя мощность потерь в электродвигателе за время переходного процесса для каждого перехода, Вт;
![]()
где ![]() — изменение энергии потерь в двигателе;
— изменение энергии потерь в двигателе;
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Используя полученные значения, рассчитаем эквивалентную мощность:
![]()
Так как выполняется условие ![]() , то двигатель не будет нагреваться.
, то двигатель не будет нагреваться.