


Аналитический метод в решении планиметрических задач
`Большую роль в развитии геометрии сыграло применение алгебры к изучению свойств геометрических фигур, разросшееся в самостоятельную науку — аналитическую геометрию. Возникновение аналитической геометрии связано с открытием метода координат, являющегося основным ей методом.
Основными геометрическими фигурами, изучаемыми аналитической геометрией, являются точки, прямые, плоскости, линии и поверхности второго порядка. Именно имея ввиду аналитическую геометрию и ее метод, замечательный французский математик Софии Жермен (1776-1831) как-то сказал: «Алгебра – не что иное как записанная в символах геометрия, а геометрия – это просто алгебра, воплощенная в фигурах».
В своей курсовой работе я рассмотрела планиметрические задачи, рассчитанные на применение аналитических методов решения. Рассмотренные задачи должны показать единство геометрии, алгебры и математического анализа. Тенденция использованию при решении геометрических задач только геометрических методов препятствует приложениям алгебры и анализа в самой математике.
Целью данной курсовой работы является изучение применения аналитического метода к решению планиметрических задач.
Курсовая работа состоит из введения, двух глав, заключения и списка используемых источников.
Во введении описана актуальность темы, сформулирована цель, дана структура курсовой работы.
В первой главе даны основные понятия аналитической геометрии. Намечен курс дальнейшего исследования.
Во второй главе описывается применение аналитического метода в решении планиметрических задач.
В заключении сформулированы основные выводы к работе.
III. СУТЬ АНАЛИТИЧЕСКОГО МЕТОДА.
1.1. У истоков аналитической геометрии.
Идейные корни аналитической геометрии лежат в плодородной почве классической древнегреческой математики. Второй по своей эпохальности после гениальных евклидовых «Начал» фундаментальный трактат Апполония из Перги (ок. 260 – 170 гг. до н.э.) «Конические сечения» состоявший из 8 книг, из которых до нас дошли 7, содержал обстоятельные описания свойств эллипса, гиперболы и параболы, включая фокусы, касательные, сопряженные диаметры, начала теории поляр. От современной аналитической геометрии конических сечений его отделяло отсутствие удобной системы обозначений, которую принесла в математику значительно позже алгебры, пришедшая с арабского Востока. Отчетливое и исчерпывающее изложение метода координат и основ аналитической геометрии с введением системы обозначений, которой мы пользуемся до настоящего времени, было сделано великим французским математиком Рене Декартом в его книге «Геометрия» (1637). Основная идея этого метода – использование алгебры в геометрии – высказывалась также другим замечательным французским математиком, современником Декарта, Пьером Ферма (1601 – 1665). Именно Ферма впервые установил, что уравнения 1-ой степени задают прямые, а второй канонические сечения. Открытие метод координат дало мощный толчок к развитию всей математики, и, прежде всего, - математического анализа. В результате XVII век стал эпохой такого расцвета математических наук, которого она не испытывала со времен Древней Греции. Заметим, к слову, что понятие координат не является выдумкой математиков: оно заимствовано из практики, и в примитивной форме способом координат пользуются даже незнакомые с математикой люди. Напомним, например, отрывок из поэмы Некрасова: «Кому на Руси жить хорошо»:
Идите по лесу,
Против столба тридцатого
Прямёхонько версту:
Придёте на поляночку,
Стоят на той поляночке
Две старые сосны,
Под этими под соснами
Закопана коробочка.
 Добудьте вы её...
Добудьте вы её...
рис. 1
Здесь 30 и 1 — координаты поляночки (в том смысле, в каком понимается задание координат предмета); за единицу длины принята верста (рис. 1).
1.2. Основные понятия аналитической геометрии.
Аналитическая геометрия не имеет строго определенного содержания и определяющим для нее является не предмет исследования, а метод. То есть аналитическая геометрия имеет своей задачей изучение свойств геометрических объектов при помощи аналитического метода.
В основе этого метода лежит так называемый метод координат, впервые систематически примененный Декартом.
Основные понятия геометрии (точки, прямые линии и плоскости) относятся к числу так называемых начальных понятий. Эти понятия можно описать, но всякая попытка дать определение каждого из этих понятий неизбежно сведется к замене определяемого понятия ему эквивалентным. С научной точки зрения логически безупречным методом введения указанных понятий является аксиоматический метод, в развитии и завершении которого величайшая заслуга принадлежит Гильберту.
Аксиоматический метод закладывает фундамент и для лежащего в основе аналитической геометрии метода координат. Ради простоты рассмотрим вопрос о введении координат на прямой. Возможность введения координат на прямой основывается на возможности установления взаимно однозначного соответствия между множеством всех точек прямой и множеством всех вещественных чисел.
Доказательство возможности установления такого соответствия базируется на аксиомах геометрии и на аксиомах (свойствах) множества вещественных чисел.
Метод координат представляет собой глубокий и мощный аппарат, позволяющий привлекать для исследования геометрических объектов. Благодаря универсальности подхода к решению различных задач, метод аналитической геометрии стал основным методом геометрических исследований и широко применяется в других областях точного естествознания – механике, физике.
Аналитическая геометрия объединила геометрию с алгеброй и анализом, что плодотворно сказалось на развитии этих трех разделов математики.
1.3.Метод координат на плоскости
Метод координат лежит в основе аналитической геометрии. Суть системы координат состоит в том, что тем или иным способом устанавливается соответствие между точками плоскости (геометрическими объектами) и упорядоченными парами вещественных чисел (алгебраическими объектами). Вследствие этого геометрические фигуры, представляющие собой множества точек плоскости, оказываются состоящими из таких точек, координаты которых удовлетворяют некоторым алгебраическим соотношениям (уравнениям, неравенствам или их системам). В результате изучение свойств геометрических фигур заменяется изучением свойств алгебраических соотношений, описывающих эти фигуры. Для их изучения, в свою очередь, применяются методы алгебры и математического анализа.
Способов введения на плоскости систем координат существует великое множество. В своей курсовой работе я рассмотрю аффинную (и её частный случай – декартову) систему координат на плоскости.
1.4. Аффинная система координат на плоскости.
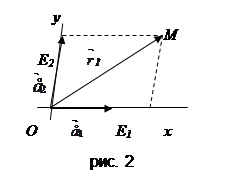
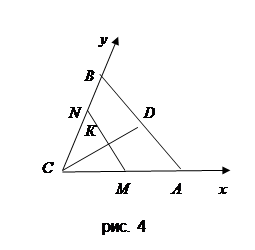
Определение. Аффинная система координат (или аффинным репером) на плоскости называется упорядоченная тройка точек этой плоскости не лежащих на одной прямой: R={О, Е1, Е2}.
Рассмотрим тогда векторы: е1= ОЕ1 и е2 = ОЕ2(рис. 2). Поскольку точки О, Е1, Е2, не лежат на одной прямой, поэтому векторы е1и е2не коллинеарны, следовательно, они образуют базис совокупности V2 всех векторов плоскости. Таким образом, мы приходим к упорядоченной тройке R={О, е1, е2}, состоящей из точки О и двух неколлинеарных векторов е1и е2.
 Обратно если дана упорядоченная тройка R={О, е1, е2}, состоящая из точки О и двух неколлинеарных векторов е1и е2, то от неё легко перейти к тройке R={О, Е1, Е2}, отложив векторы е1и е2 от точки О и взяв соответственно концы этих векторов Е1и Е2: е1= ОЕ1 и е2 = ОЕ2. Ясно, что точки О, Е1, Е2, не будут лежать на одной прямой, так как векторы е1и е2 не коллинеарны.
Обратно если дана упорядоченная тройка R={О, е1, е2}, состоящая из точки О и двух неколлинеарных векторов е1и е2, то от неё легко перейти к тройке R={О, Е1, Е2}, отложив векторы е1и е2 от точки О и взяв соответственно концы этих векторов Е1и Е2: е1= ОЕ1 и е2 = ОЕ2. Ясно, что точки О, Е1, Е2, не будут лежать на одной прямой, так как векторы е1и е2 не коллинеарны.
Таким образом, мы приходим к выводу, что задание на плоскости системы координат как упорядоченной тройки точек R={О, Е1, Е2}, не лежащих на одной прямой, равносильно заданию её как упорядоченной тройки R={О, е1, е2}, состоящей из точки О и двух неколлинеарных векторов е1и е2. В результате в геометрическую картину, составленную из точек, вводятся векторы.
Первая точка О в системе координат R называется началом системы координат, а векторы е1 и е2 – её базисными или координатными векторами. Прямая ОЕ1 с направляющим вектором е1 называется координатной осью Ох, или осью абсцисс, а прямая ОЕ2с направляющим вектором е2 называется координатной осью Оу, или осью ординат.
Пусть на плоскости задана система координат R={О, е1, е2} и произвольная точка М. Вектор ОМ = rмназывается радиус-вектором точки М относительно точки О (или системы координат R).
Определение. Координатами точки М в системе координат R={О, е1, е2} называются координаты её радиус-вектора ОМ в базисе е1, е2, то есть коэффициенты х, у в его разложении в линейную комбинацию векторов базиса: М(х, у)Ró ОМ = хе1+ уе2.
Итак, понятие координат точки тесно связывается с понятием координат вектора, а понятие системы координат для точек – с понятием базиса векторов. «Привязывая» векторный базис к фиксированной точке плоскости (началу координат), мы приходим к системе координат для точек. Если тот же векторный базис «привязать» к другому началу, мы получим другую систему координат для точек.
Векторы а и вколлинеарны тогда и только тогда, когда их координаты пропорциональны.
Каждой точке М плоскости поставим в соответствие вектор ОМ. Координаты вектора ОМ называются координатами точки М в данной аффинной системе координат. При этом если ОМ = (х, у), то пишут: М (х, у).
Пусть прямые, проведенные через точку М параллельно осям координат, пересекают оси координат соответственно в точках М1 и М2 (рис. 2). Тогда имеем
ОМ = ОМ1 + ОМ2.
С другой стороны,
ОМ = хе1+ уе2.
Следовательно,
х =ОМ1 / е, у = ОМ2 / е2.
Точки Е1 и Е2имеют координаты: Е1 (1; 0), Е2 (0;1).
Если на плоскости даны две точки А (х1, у1) и В (х2, у2), то координаты вектора АВ вычисляются так:
АВ = ОВ - ОА = (х2 - х1, у2 - у1).
Пусть точка С делит отрезок АВ в данном отношении: 
 Тогда
Тогда ![]() . Из правил действии над векторами в координатах следует, что координаты точки С определяются формулами:
. Из правил действии над векторами в координатах следует, что координаты точки С определяются формулами:
![]() ,
, ![]()
В частности, если С – середина отрезка АВ, то
![]() ,
, ![]()
Рассмотрим различные способы задания прямой на плоскости.
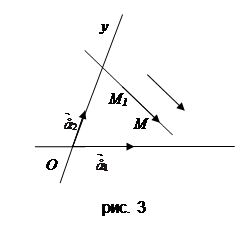
Пусть требуется написать уравнение прямой l, заданной в некоторой аффинной системе координат точкой М1 (х1, у1) и ненулевым вектором ![]() , параллельным прямой l (рис. 3).
, параллельным прямой l (рис. 3).
Вектор абудет называться направляющим вектором прямой l .
Пусть М(х, у) – произвольная точка прямой l . Тогда, согласно условию, векторы ![]() и а коллинеарны тогда и только тогда, когда выполняется равенство
и а коллинеарны тогда и только тогда, когда выполняется равенство![]() , или
, или
ОМ = ОМ1 + tа,
где t – некоторое число (параметр). Это соотношение в координатах запишется так:
Полученные уравнения называют параметрическими уравнениями прямой.
При ![]() и
и ![]() эти уравнения равносильны следующему уравнению первой степени:
эти уравнения равносильны следующему уравнению первой степени:
Если прямая задана двумя различными точками: А(х1, у1) и В (х2, у2), то вектор АВ = (х2 - х1, у2 - у1) является направляющим вектором прямой l. Следовательно, при х1![]() х2 и у1
х2 и у1![]() у2 получаем уравнение
у2 получаем уравнение
![]() ,
,
которое называется уравнением прямой, проходящей через две точки.
 В частности, если прямая l проходит через точки А (а, 0) и В(0, ), отличные от начала координат, то уравнение прямой принимает вид
В частности, если прямая l проходит через точки А (а, 0) и В(0, ), отличные от начала координат, то уравнение прямой принимает вид
Это уравнение называется уравнением прямой в отрезках.
Исключая из параметрических уравнений прямой параметр t. При ![]() получим уравнение:
получим уравнение:
у- у1 = k (х- х1),
где ![]() . Число k называют угловым коэффициентом прямой. В частном случае, при х1 = 0 и у1 = , уравнение принимает вид
. Число k называют угловым коэффициентом прямой. В частном случае, при х1 = 0 и у1 = , уравнение принимает вид
![]()
Если же ![]() , то прямая l параллельна оси Оy, а её уравнение запишется так:
, то прямая l параллельна оси Оy, а её уравнение запишется так:
х = х1.
Таким образом, всякую прямую на плоскости можно задать уравнение первой степени Ах + Ву + С = 0, где хотя бы одно из чисел А и В отлично от нуля. Верно и обратное предложение: всякое уравнение первой степени Ах + Ву + С = 0 есть уравнение некоторой прямой в аффинной системе координат на плоскости.
При ![]() уравнение Ах + Ву + С = 0 приводится к виду у = kх + , где
уравнение Ах + Ву + С = 0 приводится к виду у = kх + , где
![]() ,
, ![]()
Если же В = 0 и ![]() , то оно принимает вид х = а, где
, то оно принимает вид х = а, где ![]() .
.
1.5. Декартова система координат на плоскости. Прямая и окружность.
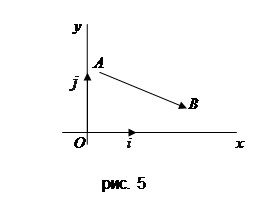
Определение. Декартовой (или ортонормированной, или прямоугольной) системой координат на плоскости называется такая аффинная система координат, базисные векторы которой ортонормированны, то есть имеют единичные длины и ортогональны (перпендикулярны). Обозначение R = {O, i, j}; так что i| = |j| = 1, i перпендикулярен j.
 При решении задач, в которых существенную роль играет понятие расстояния между двумя точками, применяется, декартова или прямоугольная система координат.
При решении задач, в которых существенную роль играет понятие расстояния между двумя точками, применяется, декартова или прямоугольная система координат.
Пусть даны две точки: А(х1, у1) и В (х2, у2). Тогда, как известно,
![]() .
.
Пользуясь формулой, запишем уравнение окружности с центром в точке С (a, ) и радиусом r:
![]() .
.
Вышеизложенная теория прямой справедлива и для прямоугольной системы координат. В частности, при решении задач пользуются уравнением прямой с угловым коэффициентом k, проходящей через точку А(х1, у1):
![]() .
.
Отсюда следует, что угловой коэффициент прямой, заданной двумя точками А(х1, у1) и В (х2, у2), вычисляется по формуле

 Угловой коэффициент в прямоугольной системе координат имеет следующий геометрический смысл:
Угловой коэффициент в прямоугольной системе координат имеет следующий геометрический смысл: ![]() , где
, где ![]() – величина угла от оси абсцисс до прямой l.
– величина угла от оси абсцисс до прямой l.
Пусть прямые l1 и l2 заданы своими уравнениями с угловыми коэффициентами: у = k1х + 1 и у = k2х + 2.
Если l1l2, то ![]() , поэтому k1 = k2, и обратно, т.е. условие k1 = k2выражает признак параллельности прямых l1 и l2.
, поэтому k1 = k2, и обратно, т.е. условие k1 = k2выражает признак параллельности прямых l1 и l2.
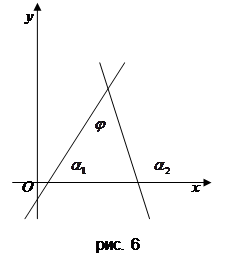
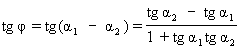
Введем формулу для вычисления угла ![]() между пересекающимися прямыми l1 и l2 (рис. 6).
между пересекающимися прямыми l1 и l2 (рис. 6).
Так как ![]() и
и ![]() ,
, ![]() , то
, то
или
Полученную формулу для вычисления угла от прямойl1 до прямой l2 можно записать и так:
Отсюда следует, что ![]() тогда и только тогда, когда k1k2 = - 1, т.е. условие k1k2 = - 1 выражает признак перпендикулярности прямых l1 и l2.
тогда и только тогда, когда k1k2 = - 1, т.е. условие k1k2 = - 1 выражает признак перпендикулярности прямых l1 и l2.
Приступая к решению геометрической задачи, следует рационально выбрать систему координат, присоединить её к данной фигуре наиболее естественным образом. Желательно, чтобы данные точки располагались на осях координат, тогда среди координат будут нули. Это позволит упростить вычисления.
1.6. Аналитическое задание геометрических фигур.Аналитическое условие и геометрические фигуры.
После того как на плоскости введена система координат, мы получаем возможность рассматривать на этой плоскости такие множества точек (а они - то и образуют те или иные геометрические фигуры), координаты х, у которых удовлетворяют тем или иным условиям (ограничениям). Эти условия могут носить характер уравнений, неравенств или систем уравнений и неравенств. Обратно, если на плоскости имеется некоторая геометрическая фигура (т.е. некоторое множество точек этой плоскости), то возникает задача нахождения аналитических условий, связывающих координаты х, у точек плоскости, которым удовлетворяют координаты всех точек данной фигуры и не удовлетворяют координаты никаких точек плоскости, не принадлежащих этой фигуре.
Аналитические условия, связывающие две переменных х, у и характеризующие фигуры Ф, с точки зрения математической логики представляют собой двухместный предикат Р(х, у), заданный на множестве вещественных чисел: х, у ÎR. Множество истинности этого предиката как раз и представляют собой такое множество пар действительных чисел х, у, которые служат координатами точек фигуры Ф и только таких точек. Этот факт записывают следующим образом:
Ф = {М(х, у): Р(х, у) – истинно}.
При этом, нетрудно понять, что если предикат Р(х. у) представляет собой конъюнкцию двух предикатов P1(х, у) Ù Р2 (х, у), то фигура Ф есть пересечение двух фигур Ф = {М (х, у): Р1 (х, у) Ù Р2 (х, у) – истинно} = {М (х, у): Р1 (х, у) – истинно} Ç {М (х, у): Р2 (х, у) – истинно} = Ф1 Ç Ф2.
Аналогично, если предикат Р(х, у) представляет собой дизъюнкцию двух предикатов P1(х, у) Ú Р2 (х, у), то фигура Ф есть объединение фигур Ф = Ф1 È Ф2.
Итак, при координатном подходе к изучению геометрических фигур выделяются две взаимно обратные задачи:
1. по заданным геометрическим свойствам фигуры Ф составить аналитические условия Р (х, у), определяющие эту фигуру;
2. по заданным аналитическим условиям Р (х, у), определяющим фигуру Ф, выяснить её геометрические свойства.
Составление аналитических условий, определяющих фигуру.
Здесь по геометрическому описанию фигуры Ф требуется сформулировать такие аналитические условия Р(х, у), что будут справедливы два утверждения:
а) если точка М(х, у) Î Ф, то её координаты х, у удовлетворяют условиям Р(х, у), т.е. будучи поставлены в этот предикат, превращают его в истинное утверждение (высказывание);
б) если координаты точки М(х, у) удовлетворяют условиям Р(х, у), то М Î Ф.
Ясно, что второе утверждение можно заменить равносильным ему утверждением:
б`) если точка М не принадлежит фигуре Ф, то её координаты не удовлетворяют условию Р(х, у).
Практически это делается так. На данной фигуре Ф берется произвольная (или, как говорят, текущая) точка М(х, у) с текущими координатами х, у и отыскивается (необходимые и достаточные) условия принадлежности точки М фигуре Ф, т.е. строится некая модель этой геометрической ситуации (принадлежности М