


Анализ пьезокерамического преобразователя
Устройства, преобразующие электрическую энергию в акустическую (энергию упругих колебаний среды) и обратно называют электроакустическими преобразователями (ЭАП). В зависимости от направления преобразования существуют два вида: излучатели и приёмники. ЭАП широко используют для излучения и приёма звука в технике связи и звуковоспроизведения, для измерения и приёма упругих колебаний в ультразвуковой технике, гидролокации и в акустоэлектронике. Наиболее распространённые ЭАП линейны, т.е. удовлетворяют требованию неискажённой передачи сигнала, и обратимы, т.е. могут работать и как излучатель, и как приёмник, и подчиняются принципу взаимности.
В большинстве случаев имеет место двойное преобразование энергии: электромеханическое, в результате которого часть подводимой к преобразователю электрической энергии переходит в энергию колебаний некоторой механической системы, и механоакустическое, при котором за счёт колебаний механической системы в среде создаётся звуковое поле. ЭАП – это своеобразные связанные колебательные системы. В такой системе происходит взаимодействие электрических и механических процессов. Потому и эквивалентные схемы ЭАП представляют в виде двух связанных контуров – механического и электрического. В физике существует метод электромеханических аналогий, с помощью которого получают эквиваленты электрических и механических величин.
Данный метод основан на подобии математических моделей механических и электрических систем. Уравнения движения механических систем и уравнения напряжений и токов в электрических цепях принимают за математические модели, а построенная с использованием электрических элементов – аналогов эквивалентная механической системе электрическая схема предстает как графическое изображение уравнения движения. Граничные условия в схеме выглядят в виде источников и потребителей энергии.
1.Теоретическая часть
1.1 Пьезоэффект. Общие положения
В некоторых диэлектриках и полупроводниках под действием деформаций в определенных направлениях появляются электрические заряды, то есть они поляризуются. Это явление, названное прямым пьезоэффектом, было обнаружено у кристаллов кварца, турмалина, сегнетовой соли, и др.
Под действием внешнего электрического поля в пьезоэлектрике изменяется взаимное расположение атомов решетки, а, следовательно, и размеры кристалла. При действии внешней силы, деформирующей кристалл, также изменяется расположение атомов решетки, в результате чего внутри кристалла меняется электрическое поле и появляется поляризация у всего кристалла, а между электродами – разность потенциалов.
Деформацию диэлектрика, т.е. изменение его размеров под действием электрического поля, называют обратным пьезоэффектом. Таким образом, если на металлические обкладки подать переменное напряжение, то пластинка будет попеременно растягиваться и сжиматься вдоль оси ![]() , т.е. в ней будут возбуждаться механические колебания.
, т.е. в ней будут возбуждаться механические колебания.
1.2 Уравнения пьезоэффекта
Важно отметить, что приведенные соотношения имеют лишь качественный характер. Реальное описание пьезоэлектрического эффекта намного сложнее. Дело в том, что механическое напряжение является тензорной величиной, имеющей шесть независимых компонентов, тогда как поляризация является векторной величиной. Поэтому пьезомодуль, устанавливающий связь между вектором поляризации и механическими напряжениями, является тензором третьего ранга, имеющим 18 независимых компонентов. В тензорной форме уравнение прямого и обратного пьезоэффектов принимает следующий вид:
![]()
![]()
где i = 1,2,3 – компоненты вектора поляризованности; j = 1,2…6 – компоненты тензора механических напряжений или деформаций.
При пьезоэлектрическом эффекте возникшее в кристалле электрическое поле можно охарактеризовать вектором электрической поляризации Р, вектором электростатической индукции D или вектором Е, а действующее на кристалл механическое усилие – тензором механических напряжений Тij или тензором механических деформаций еij. Таким образом, тензорное воздействие вызывает векторное явление, или обратно. Значит, связывающее их свойство кристалла должно быть тензором третьего ранга:
![]()
В общем случае (без учёта влияния симметрии кристалла) каждая компонента вектора Р связана с каждой компонентой тензора Тijсоотношением:
![]()
![]()
Входящие в это уравнение 27 компонент образуют тензор третьего ранга – тензор пьезоэлектрических модулей. Вследствие симметрии тензора механических напряжений Тij его компоненты![]() Поэтому:
Поэтому: ![]() и число независимых компонент тензора сокращается до 18. Компактные матричные обозначения вводятся по схеме: 11 → 1, 22 → 2, 33→ 3, 23 или 32 → 4, 13 или 31 → 5, 12 или 21 → 6. Для
и число независимых компонент тензора сокращается до 18. Компактные матричные обозначения вводятся по схеме: 11 → 1, 22 → 2, 33→ 3, 23 или 32 → 4, 13 или 31 → 5, 12 или 21 → 6. Для ![]() примем обозначения:
примем обозначения: ![]() , тогда:
, тогда:
![]()
![]()
Таблица 1. Матрица пьезомодулей
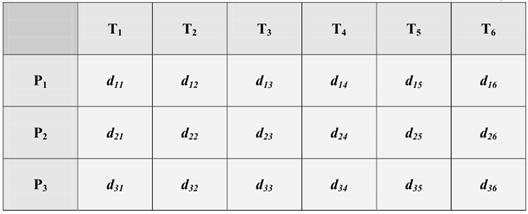
Чтобы определить физический смысл каждой из этих компонент рассмотрим одну из компонент, например d14: d14 = d123 + d132, т.е. P1 = (d123 + d132) T23. Если в кристалле d14 ≠ 0, то это значит, что под действием сдвигового напряжения, приложенного в направлении оси Х2 к площадке, нормальной к оси Х3 (или в направлении Х3 к площадке, нормальной к Х2), возникает электрическая поляризация, характеризуемая составляющей вектора Р1, направленная вдоль оси Х1.
Данный смысл пьезомодуля d14 изменится, если изменить кристаллографическую установку. Проанализировав таким образом все 18 пьезомодулей, можно прийти к выводу, что они характеризуют четыре типа пьезоэлектрических эффектов.
Уравнение ППЭ можно выразить через относительную деформацию ![]()
![]()
где ![]() – компоненты тензора деформации упругой податливости кристалла.
– компоненты тензора деформации упругой податливости кристалла.
Тогда уравнение ППЭ примет вид
![]() ,
,
где ![]() – компоненты пьезоэлектрического коэффициента третьего ранга, также как и
– компоненты пьезоэлектрического коэффициента третьего ранга, также как и ![]() . Он также характеризуется пьезоэлектрическими свойствами кристалла.
. Он также характеризуется пьезоэлектрическими свойствами кристалла.
ППЭ можно характеризовать не только через поляризацию ![]() , но и через вектор напряженности электрического поля
, но и через вектор напряженности электрического поля ![]()
![]()
![]()
где![]() и
и ![]() – пьезоэлектрические коэффициенты кристалла, связанные между собой, а также с коэффициентами
– пьезоэлектрические коэффициенты кристалла, связанные между собой, а также с коэффициентами ![]() и
и ![]() через упругие и диэлектрические постоянные.
через упругие и диэлектрические постоянные.
Основное уравнение обратного пьезоэффекта (ОПЭ) имеет вид
![]()
где величина ![]() – это компоненты тензора третьего ранга идентичного тензору пьезомодулей, входящих в основное уравнение пьезоэффекта.
– это компоненты тензора третьего ранга идентичного тензору пьезомодулей, входящих в основное уравнение пьезоэффекта.
1.3 Пьезокерамические преобразователи и эквивалентные схемы
В пьезокерамических элементах (ПКЭ) разных геометрических форм можно возбудить линейные или планарные нормальные колебания в различных направлениях. Типы нормальных колебаний, называемые модами колебаний, в ПЭК зависят от взаимной ориентации оси поляризации, электрического поля и колебательного перемещения частиц. По взаимной ориентации электрического поля и колебательного перемещения выделяют моды колебаний, в которых электрическое поле поперечно направлению колебаний (пьезоэлектрически мягкие моды) или совпадают с ними (пьезоэлектрически жесткие моды).
Для выбора независимых электрических переменных (![]() или
или ![]() ) в уравнениях пьезоэффекта оценивают электрические граничные условия в направлениях одномерного линейного или планарного колебательного движения. Электрические граничные условия определяются расположением поверхностей электродов и формой ПКЭ.
) в уравнениях пьезоэффекта оценивают электрические граничные условия в направлениях одномерного линейного или планарного колебательного движения. Электрические граничные условия определяются расположением поверхностей электродов и формой ПКЭ.
Для пьезомягких мод поверхности электродов параллельны направлению колебаний (используется поперечный пьезоэффект): ![]() , поэтому независимой электрической переменной целесообразно выбрать
, поэтому независимой электрической переменной целесообразно выбрать ![]() . Входящая в этом случае в соответствующие уравнения состояния упругая константа с индексом
. Входящая в этом случае в соответствующие уравнения состояния упругая константа с индексом ![]() свободна от дополнительного вклада, связанного с пьезоэффектом, при этом
свободна от дополнительного вклада, связанного с пьезоэффектом, при этом ![]() . Отсюда ясно, почему моды с полем
. Отсюда ясно, почему моды с полем ![]() , поперечным колебаниям перемещения, называют пьезомягкими.
, поперечным колебаниям перемещения, называют пьезомягкими.
Для пьезожестких мод поверхности электродов перпендикулярны направлению колебаний (используется продольный пьезоэффект): ![]() , поэтому независимой переменной целесообразно выбрать
, поэтому независимой переменной целесообразно выбрать ![]() .
.
Механические граничные условия для одномерных или планарных мод колебаний формулируются в зависимости от того, какой размер определяет резонансную частоту: наибольший или наименьший. Моды колебаний по этому признаку разделяются на низкочастотные и высокочастотные. Промежуточные моды выделяют как среднечастотные.
1.4 Дисковый пьезокерамический преобразователь
Для проведения гидроакустических измерений необходимы излучатели и приемники звука, удовлетворяющие требованиям неискаженного звукового поля, широкого частотного диапазона, отсутствия направленности действия.
Пьезокерамический дисковый преобразователь (рис. 1) состоящий из металлического диска 1 и двух приклеенных к нему круглых пьезокерамических биморфных пластин 2, колебательная система помещена в корпус 3, нижняя пластинка – в заливочную массу 4.
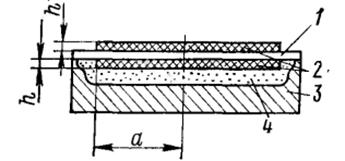
Рис. 1. Пьезокерамический дисковый преобразователь
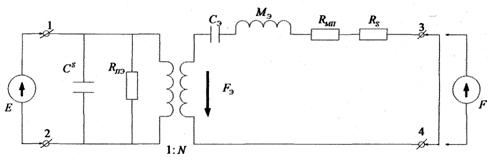
Рис. 5. Эквивалентная схема дискового пьезокерамического ЭАП
где:
Сs – электрическая емкость преобразователя;
R – сопротивление электрических потерь;
N – коэффициент электромеханической трансформации;
СЭ – эквивалентная гибкость;
MЭКВ – эквивалентная масса;
RS – сопротивление излучателю;
Rмп – сопротивление механических потерь.

2. Расчетная часть
2.1 Постановка задачи
Диск, изготовленный из пьезоматериала ЦТСНВ-1, имеет средний радиус а=4 см. Учитывая, что толщина дискаd=a/5
– определим элементы электромеханической схемы, включая коэффициент трансформации N, сопротивление излучения Rs, сопротивление электрических потерь Rпэ, сопротивление механических потерь Rмп;
– найдем конечные формулы для КЭМС и КЭМСД и рассчитаем их;
– определим частоты резонанса и антирезонанса;
– вычислим добротность преобразователя в режиме излучения;
– рассчитаем и построим частотные характеристики входной проводимости и входного сопротивления.
Геометрические размеры диска:
![]() м – средний радиус диска;
м – средний радиус диска;
![]() м – толщина диска.
м – толщина диска.
Константы пьезокерамического материала ЦТСНВ-1:
![]() кг/м3 – плотность;
кг/м3 – плотность;
![]() Н/м2 – модуль упругости;
Н/м2 – модуль упругости;
![]() Кл/м2 – пьезоэлектрическая постоянная;
Кл/м2 – пьезоэлектрическая постоянная;
![]() – тангенс угла электрических потерь;
– тангенс угла электрических потерь;
![]() Ф/м – диэлектрическая проницаемость.
Ф/м – диэлектрическая проницаемость.
Свойства воды:
![]() кг/м3 – плотность;
кг/м3 – плотность;
![]() м/с – скорость звука в воде.
м/с – скорость звука в воде.
Акустомеханический КПД преобразователя:
![]() .
.
2.2 Расчет параметров ЭАП
1. Эквивалентная масса
![]()
2. Эквивалентная податливость
![]()
3. Электрическая емкость

4. Коэффициент электромеханической трансформации
![]()
5. Собственная частота
![]()
6. Активное сопротивление излучения

7. Активное сопротивление, учитывающее потери энергии
![]()
8. Активное сопротивление механических потерь
![]()
9. Коэффициент электромеханической связи
![]()
10. Резонансная частота

11. Частота антирезонанса
![]()
12. Добротность в режиме излучения
![]()
2.3 Расчет и построение частотных характеристик входной проводимости и входного сопротивления
Для емкостных ЭАП с элементами ![]() и
и ![]() активная и реактивная проводимость выражаются следующим образом
активная и реактивная проводимость выражаются следующим образом
 , (3)
, (3)
пьезоэффект преобразователь частотный сопротивление
 , (4)
, (4)
где  . Произведем замену
. Произведем замену  , тогда
, тогда
 . (5)
. (5)
Подставив (5) в (3) и (4) с учетом замены получим
 ,
,
 .
.
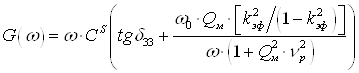
Таким образом, комплексная проводимость имеет вид:
![]() .
.
На рис. 4 представлены графики зависимостей ![]() ,
, ![]() ,
, ![]()
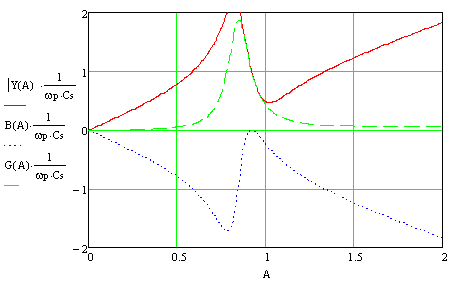
Рис. 4. Частотная характеристика проводимости емкостного ЭАП
Комплексное сопротивление в зависимости от относительной частоты имеет вид
![]() ,
,
где активное и реактивное сопротивление связано с активной и реактивной проводимостью следующими соотношениями
На рис. 5 представлены графики зависимостей ![]() ,
, ![]() ,
, ![]() .
.
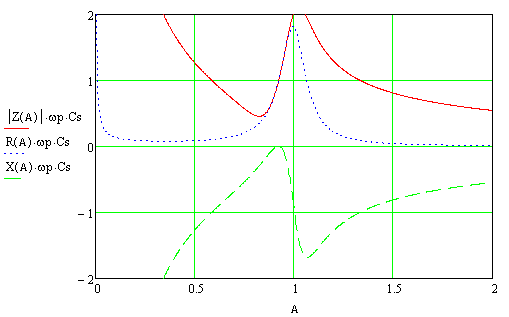
Рис. 5. Частотная характеристика входного сопротивления емкостного ЭАП
Заключение
В работе были определены элементы электромеханической схемы, частоты резонанса и антирезонанса, расчет значения КЭМС, вычисление добротности преобразователя в режиме излучения, расчет и построение частотных характеристик входной проводимости и входного сопротивления.
В процессе анализа графиков стало понятно, что данная система является резонансной и имеет четко выраженный резонанс и антирезонанс. Из полученного значения коэффициента электромеханической связи ![]() можно сделать вывод о большом КПД системы.
можно сделать вывод о большом КПД системы.
Из построенного графика можно сделать заключение, что существует возможность определения резонансной и антирезонансной частоты и определение резонансного промежутка![]() . Причем, чем выше
. Причем, чем выше ![]() , тем выше будут проявляться керамические свойства материала.
, тем выше будут проявляться керамические свойства материала.
Список использованных источников
1. Пугачев С.И. Конспект лекций по курсу ЭАП.
2. Резниченко А.И. Подводные электроакустические преобразователи. Л.: ЛКИ, 1990.
3. Свердлин Г.М. Гидроакустические преобразователи и антенны. Л.: Судостроение, 1988.