Разработка следящей системы
Список сокращений и терминов, используемых в пояснительной запискеСАУ — система автоматического управления.
ТАУ — теория автоматического управления.
ДПТ — двигатель постоянного тока.
САР — система автоматического регулирования.
СИФУ — система импульсно-фазового управления.
УВ — управляемый выпрямитель.
ОВ — обмотка возбуждения ДПТ.
КУ — корректирующее устройство.
РС, РП — регулятор скорости, регулятор положения.
ТП — тиристорный преобразователь.
ЭЧ — электрическая часть ДПТ.
ЭМЧ — электромеханическая часть ДПТ.
МЧ — механическая часть ДПТ.
Р — редуктор.
Н — нагрузка.
С — сельсины.
ДТ, ДС, ДР — датчик тока, датчик скорости, датчик рассогласования.
UЗ — напряжение задания.
Uп — напряжение питания.
ОУ — операционный усилитель.
IВ — ток в обмотке возбуждения ДПТ.
Мдв — электромагнитный момент, развиваемый ДПТ.
Мс — статический момент.
АФХ — амплитудо-фазовая характеристика.
Целью данной курсовой работы является разработка следящей системы, задачей которой является воспроизведение траектории, которая заранее не задана. К системам данного класса предъявляются требования по быстродействию и точности воспроизведения задающего сигнала.
Следящие системы применяются в приводе манипуляторов роботов, на конвейерных установках и любых других устройствах, где заранее неизвестна траектория рабочего органа.
При проектировании системы необходимо:
– Построить функциональную схему;
– Определить передаточные функции звеньев;
– На основании функциональной схемы построить структурную схему;
– Проверить систему на устойчивость, на статическую ошибку.
1.1 Функциональный анализ и составление функциональной схемы САР
Функционально система регулирования имеем следующий вид:
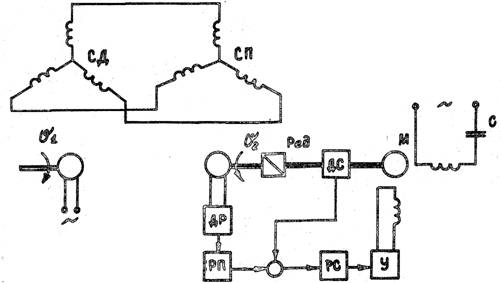
Рисунок 1.1—Функциональная схема электропривода
Задачей следящей системы является отработка задающего сигнала. В качестве сравнивающего узла используются сельсины, работающие в трансформаторном режиме. При наличии угла рассогласования между сельсином-датчиком (прикреплен к рабочему органу) и сельсином-приемником, в обмотке возбуждения приемника наводиться ЭДС, которая через датчик рассогласования подается на вход системы и является задающим сигналом для поворота сельсина-приемника двигателем. Для отработки задающего сигнала применяется двухконтурная система подчиненного регулирования.
Ниже приводится краткое описание принципа работы схемы.
Входной величиной регулятора положения является напряжение поступаемое от датчика рассогласования.
Входными сигналами регулятора скорости являются: сигнал задания скорости и отрицательный сигнал, поступающий от датчика скорости. Выходной сигнал регулятора скорости является управляющим для тиристорного преобразователя, который состоит из блока управления (СИФУ) и силовой части (УВ). Выходной величиной преобразователя является напряжение обмотки возбуждения.
С помощью изменения напряжения производится изменение электромагнитного момента ДПТ, а, следовательно, и скорости.
Двигатель через редуктор вращает рабочий орган, на котором закреплен сельсин-приемник. Тем самым уменьшается сигнал от датчика рассогласования.
Функциональная схемы состоит из следующих блоков:
Регулятор положения.
| Предназначен для преобразования напряжения задания положения в выходное для управления контуром скорости ДПТ. Входная величина: UДР. Выходная величина: UУП; Возмущения: напряжение питания ОУ; температура, изменяющая характеристики ОУ. |