


Налагодження пристроїв релейного захисту та автоматики
Національний університет "Львівська політехніка"
Інститут енергетики та систем керування
Конспект лекцій з дисципліни
"НАЛАГОДЖЕННЯ ПРИСТРОЇВ РЕЛЕЙНОГО ЗАХИСТУ ТА АВТОМАТИКИ"
Підготував доцент кафедри
"Електричні системи та мережі"
Кідиба В.П.
Львів – 2010
ЦИФРОВІ ПРИСТРОЇ ЗАХИСТУ ТА АВТОМАТИКИ
1. Загальна характеристика цифрових пристроїв захисту та автоматики
Останніми роками в енергосистемах України широко впрваджуються пристрої релейного захисту, виконані на цифрових принципах. За кордоном такі пристрої впроваджуються в експлуатацію вже на протязі більше двох десятків років. Тому не дивно, що закордонні фірми, які займаються розробкою цифрових пристроїв релейного захисту та автоматики, мають суттєву перевагу у порівнянні з вітчизняними виробниками подібної техніки.
Найбільш відомими зарубіжними фірмами в області розробок цифрових пристроїв релейного захисту та автоматики є ABB, SIEMENS, ALSTOM, GENERAL ELECTRIC.
В літературі досить часто цифрові пристрої ще називать мікропроцесорними. На наш погляд це не зовсім вірно. Мікропроцесор – це є один з основних елементів багатьох пристроїв релейного захисту та автоматики. Але є пристрої, які виконані на основі мікроконтролерів. Є більш складні пристрої релейного захисту, автоматики, об‘єднані в спільну інформаційну мережу, для організації якої використовують комп’ютери з потужними процесорами. Спільним для всіх цих технічних елементів є використання цифрових принципів їхнього функціювання. Тому доцільно всі ці пристрої називати цифровими пристроями релейного захисту.
У порівнянні з традиційними електромеханічними та напівпровідникковими пристроями релейного захисту цифрові пристрої мають ряд суттєвих переваг, що робить їх застосування в енергосистемах на даний час практично безальтернативним. Основними з них є:
Ÿ більш висока точність відтворення заданих характеристик функціонування пристрою. В цілому, апаратна похибка цифрових захистів може досягати до 2%. Так, один з основних параметрів вимірювальних органів захисту – коефіцієнт повернення – може мати значення 0,99. Досягненя такого значення коефіцієнта на напівпровідникових та електромеханічних реле потребує складних технічних рішень. Прикладом такого реле є захист від симетричного перевантаження статора генератора, виконаного на спеціальному реле РТВК. Це реле виконано на напівпровідникових елементах і дозволяє збільшити коефіцієнт порвернення до 0,99. Про те воно є дорогим та громіздким. Висока точність відтворення характеристик захистів дозволяє змінити деякі параметри узгодження між захистами суміжних елементів електричної мережі. Наприклад, можна зменшити ступінь селективності для максимальних струмових захистів суміжних елементів мережі, що в свою чергу зменшить час їх спрацювання і, як наслідок, час ліквідації аварії;
· отримання характеристик будь-якої складності. Це особливо є актуальним для дистанційних захистів, вимірні органи яких можуть мати які завгодно характеристики і враховувати будь-які особливості режимів, що можуть виникати в енергосистемі. При цьому зміна форми характеристик не потребує ніяких додаткових технічних переробок – вона змінюється на алгоритмічному рівні;
· запам‘ятовування координат режиму під час спрацювання цифрового пристрою. Практично всі цифрові захисти запам‘ятовують координати режиму аварійного та доаварійного режиму, що дає змогу експлуатаційному персоналу здійснювати глибокий аналіз аварійних ситуацій, визначати причини аварії і на основі цього при необхідності уточнювати та змінювати характеристики захистів та автоматики;
· можливість змінювати конфігурацію пристрою. В поцесі розвитку мережі може виникнути необхідність в зміні характеристик пристроїв захисту – змінити уставки, ввести або вивести з роботи деякі функції тощо. Такі зміни не потребують ніяких технічних витрат, тому що вони здійснюються на програмному рівні;
· універсальність. Ця особливість цифрових пристроїв в більшій мірі стосується розробників, а не експлуатацію. Використовуючи універсальний процесорний модуль, відкоректувавши вхідні та вихідні кола, змінюючи алгоритм функціювання, можна створювати різні типи захистів та автоматики;
· значно менші габарити та менші затрати електротехнічних матеріалів. Один невеликий за розміром цифровий пристрій може замінити цілу групу складних реле, виконаних на напівпрвідниках або електромеханічних елементах. Наприклад, напівпровідниковий дистанційний захист типу ПДЕ від міжфазних к.з. має дев‘ять вимірних дистанційних органів, кожен з яких виконаний у вигляді окремого модуля. В цифровому ж пристрої характеристики всіх цих вимірних органів задаються на програмному рівні і реалізуються віртуально в процесорі;
· можливість самодіагностики. Алгоритми функціонування сучасних цифрових пристроїв захисту, особливо складних, обов‘язково включають функцію самодіагностики, яка періодично здійснює контроль справності всіх складових пристрою – вхідних кіл, вихідних кіл, цифрових елементів і при виявленні несправностей робота пристрою блокується з автоматичним повідомленням про це черговому персоналу. Традиційні ж пристрої релейного захисту, особливо електромеханічні, такої можливості не мають і є багато випадків в експлуатації, коли при виникненні аварії ці пристрої не спрацьовували і після аналізу виявлялось, що вони були несправними, про що оперативний персонал і не здогадувався;
· менше споживання енергії для функціювання, що суттєво зменшує потужність джерел енергії оперативного струму;
· менше навантаження та первинні вимірювальні трансформатори струму та напруги. Потужність споживання сучасних цифрових пристроїв релейного захисту складає до 0,5 ВА. Це дає змогу під‘єднувати до первинних вимірювальних трансформаторів струму та напруги більшу кількість пристроїв релейного захисту та автоматики, забезпечуючи при цьому роботу трансформаторів струму та напруги в заданому класі точності;
· простота в експлуатації. Під час проведення планових профілактичних робіт немає необхідності перевіряти характеристики окремих складових елементів, як в традиційних пристроях релейного захисту, тому що фізично їх немає, їхні харакетристики реалізовані програмно. Тому перевіряються лише загальні характеристики функкціювання. Це суттєво зменшує номенклатуру робіт і відповідно час перевірки пристроїв.
2. Структурна схема цифрового пристрою РЗА
Незалежно від призначення цифрових пристроїв релейного захисту – струмові, дистанційні тощо – вони мають схожу структуру, яка наведена на рис. 2.1.
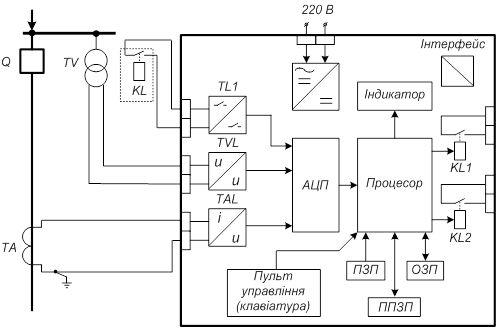
Рис.2.1. Структурна схема цифрового захисту
Основним елементом цифрового захисту є процесор, на якому реалізований алгоритм роботи конкретного захисту. В залежності від призначення пристрою та фірми виробника може бути застосований один процесор або декілька. Так, фірма АВВ надає перевагу багатопроцесорним системам, в яких кожен процесор виконує конкретні задачі алгоритму і ці процесори працюють паралельно. Це дозволяє забезпечити потрібну швидкодію та точність. Інші фірми застосовують однопроцесорні системи, що вимагає для забезпечення потрібних характеристик застосування більш потужних процесорів. Враховуючи важкі умови експлуатації пристроїв релейного захисту (на багатьох підстанціях ці пристрої працюють в неопалювальних приміщеннях), застосовують спеціальні процесори так званого індустріального виконання, які можуть працювати при температурі оточуючого середовища від мінус 30 до плюс 50°С, відносній вологості до 80%.
Процесор має зв‘язок з об‘єктом захисту через кола вводу – виводу. Вхідною інформацією є, як правило, аналогові сигнали – струми, напруги, температура тощо та бінарні – положення комутаційних апаратів, стан вихідних реле інших пристроїв релейного захисту та автоматики тощо. Вихідними сигналами цифрових захистів, як і інших захистів є традиційно бінарні сигнали. Ці сигнали поступають після спрацювання цифрового захисту в кола управління та в кола сигналізації.
2.1 Перетворення аналогових сигналів
Контрольовані напруги та струми є неперервними в часі аналоговими сигналами і можуть приймати на фіксованому відрізку часу будь-які значення в межах, обумовленими режимом роботи електричної мережі. Цифрові пристрої захисту працюють не з аналоговими, а з дискретними (цифровими) сигналами, котрі можуть приймати на відміну від аналогових сигналів лише кінцеву множину значень для конкретних моментів часу. Процес перетворення аналогових сигналів в дискретні називається дискретизаціє або квантуванням. Пристрій, який здійснює це перетворення називається аналогоцифровим перетворювачем (АЦП).
Попередньо аналогові сигнали, які контролюються пристроями захисту – це струм від трансформатора струму ТА та трансформатора напруги TV підводяться до спеціальних вхідних перетворювачів (на схемі це TAL та TVL). Ці перетворювачі призначені для гальванічної розв‘язки пристрою від зовнішніх кіл (трансформаторів струму та трансформаторів напруги), а також для отримання нормованої напруги на виході з подальшим її перетворенням АЦП в цифрові сигнали.
На рис. 2.2 наведені принципові схеми вхідних перетворювачів струму та напруги, відповідно рис. 2.2а) та рис. 2.2б).
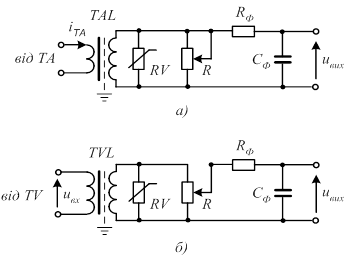
Рис. 2.2. Принципові схеми вхідних перетворювачів струму а) та напруги б).
Сигнали від трансформаторів струму TA та напруги TV подаються на первинні обмотки проміжних трансформаторів TAL та TVL. На вторинних обмотках цих трансформаторів відповідно струм та напруга перетворюються в напруги, пропорційні відповідно величині струму та напруги. Для того, щоб імпульсні сигнали, які можуть виникати у вторинних колах трансформаторів струму та напруги, не попадали в електронну частину цифрового пристрою та не пошкоджували його, між первиинною та вторинною обмотками проміжних трансформаторів TAL та TVLвстановлюють екран. Для захисту електронних блоків цифрового пристрою від перенапруг паралельно до вторинних обмоток проміжних трансформаторів TAL та TVLвстановють варистори RV. В деяких схемах для захисту застосовують стабілітрони. Для узгодження вторинної напруги на виході проміжних трансформаторів з вхідними сигналами пристрою АЦП служать змінні опори R. Для правильної роботи АЦП необхідно унеможливити попадання на нього високочастотного спектру сигналу. Тому застосовується високочастотний фільтр, який виконаний на основі опору Rф та ємності Сф. Слід відмітити, що під час реалізаціїї алгоритму функціонування захисту додатково здійснюється цифрова фільтрація сигналу. Вихідні сигнали uвих з вхідних перетворювачів TAL та TVLпоступають на вхід АЦП.
Перехід від аналогового неперервного сигналу до дискретного супроводжується деякою втратою інформації. Це пояснюється тим, що АЦП здійснює перетворення вхідного аналогового сигналу в дискретний через деякі часові проміжки ![]() , а між ними значення вхідного сигнал не контролюється (рис. 4). Чим менший цей часовий проміжок, тим точніше відтворюється аналоговий сигнал в цифровій формі. Основними характеристиками АЦП є його розрядність та інтервал дискретизації сигналу за часом. Дискретизація сигналу за часом ще називають частотою виборок, яка пов’язана з дискретизацією за часом
, а між ними значення вхідного сигнал не контролюється (рис. 4). Чим менший цей часовий проміжок, тим точніше відтворюється аналоговий сигнал в цифровій формі. Основними характеристиками АЦП є його розрядність та інтервал дискретизації сигналу за часом. Дискретизація сигналу за часом ще називають частотою виборок, яка пов’язана з дискретизацією за часом ![]() виразом:
виразом:
![]() (2.1)
(2.1)
Для періодичного сигналу з періодом Т можна визначити за відомою частотою кількість виборок за період:
![]() (2.2)
(2.2)
Для періодичного сигналу існує взаємозв’язок між верхньою частотою сигналу, який кантується та кількістю виборок за період. Вченими К. Шенноном та В. Котельниковим ще в 30-х роках було доведено, що для точного відтворення первинного періодичного сигналу з його дискретного представлення необхідно, щоб частота виборок ![]() повинна хоча б в два рази перевищувати максимальну частоту вхідного періодичного сигналу
повинна хоча б в два рази перевищувати максимальну частоту вхідного періодичного сигналу ![]() :
:
![]() (2.3)
(2.3)
Це відповідає максимальному числу виборок за період
![]() (2.4)
(2.4)
При заданому максимальному значенні числа виборок ![]() необхідно з вхідного аналогового сигналу виключити всі сигнал з частотою, вищою від
необхідно з вхідного аналогового сигналу виключити всі сигнал з частотою, вищою від ![]() . В протилежному випадку після зворотнього перетворення сигналу в ньому з’явиться сигнал пониженої частоти, який спотворить реальний вхідний сигнал. Тому на вході АЦП застосовують фільтр вищих гармонік з смугою пропускання не вище ніж частота
. В протилежному випадку після зворотнього перетворення сигналу в ньому з’явиться сигнал пониженої частоти, який спотворить реальний вхідний сигнал. Тому на вході АЦП застосовують фільтр вищих гармонік з смугою пропускання не вище ніж частота ![]() . На схемі рис. 2.2 цей фільтр реалізований на основі RC елементів
. На схемі рис. 2.2 цей фільтр реалізований на основі RC елементів ![]() та
та ![]() .
.
В сучасних цифрових пристроях РЗА застосовують АЦП з частотою виборок до 2000 Гц, що відповідає 40 виборкам за період промислової частоти 50 Гц. Пристрої з такою частотою виборок дозволяють контролювати вхідний сигнал з частотою до 1000 Гц. Це відповідає 20 гармоніці при основній частоті 50 Гц.
2.2 Вхідні бінарні сигнали
Для роботи захисту, крім аналогових сигналів, необхідно мати також інформацію про бінарні сигнали від інших пристроїв релейного захисту та автоматики, положення комутаційних апаратів тощо. На практиці ці сигнали ще називають дискретними. Щоб не плутати ці сигнали з дискретними сигналами, які отримуються після квантування пристроєм АЦП аналогових сигналів в подальшому будемо їх називати бінарними. Наприклад, з метою реалізації функції АПВ, ПРВВ; необхідно мати інформацію про стан вимикача, на який діє даний захист, для прискорення дії даного захисту по команді від захисту шин необхідно мати інформацію від вихідних кіл захисту шин тощо. На рис. 2.1 бінарний сигнал від зовнішнього пристрою (умовно показаний у вигляді зовнішнього реле KL) подається на вхідний перетворювач бінарних сигналів TL1.
В сучасних цифрових пристроях бінарні сигнали від зовнішніх пристроїв подаються через оптрони. Оптрон представляє собою електронний ключ у вигляді транзистора VT (рис. 2.3), який керується світлодіодом VD. Під час протікання струму через світлодіод (струм через світлодіод починає протікати після замикання контакта KL), останній подає сигнал на базу транзистраVT, який спрацьовує і на його виході з’являється сигнал Uвих, який сигналізує про зміну стану бінарного входу. Час спрацювання такого перетворювача мізерний і складає долі мікросекунди.
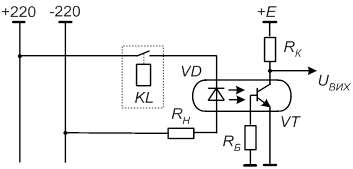
Рис. 2.3. Схема вводу дискретного сигналу
Для організації протікання струму через світлодіод VD після спрацювання зовнішнього контакта KL використовується зовнішнє джерело оперативного струму, як правило напругою 220 В (зрідка 110 В). Це є недоліком даної схеми. Тому що навіть після вимкнення від оперативного струму зовнішнього пристрою, де встановлене реле KL, на контактах цього реле присутня напруга від оперативних кіл. Це є небезпечним для обслуговуючого персоналу. Тому для запобігання ураження електричним струмом обслуговуючого персоналу під час проведення планових робіт для ініціалізації бінарних входів на інших пристроях, які мають зв’язок з даним пристроєм, застосовують джерело оперативного струму з пониженою напругою, наприклад джерело напругою 24 В (рис. 2.4), яке реалізоване на інверторному перетворювачі UVZ.
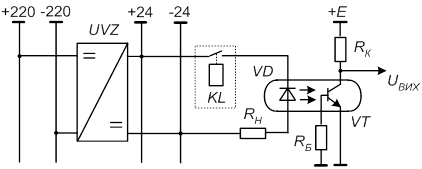
Рис. 2.4. Схема вводу дискретного сигналу на пониженій напрузі
Але така схема має два суттєвих недоліки. По перше, вона менш надійна, ніж схема, наведена на рис. 2.3 за рахунок наявності інверторного перетворювача UVZ. Технічно це досить складний ннапівпровідниковий елемент, який попередньо здійснює пертворення постійного струму напругою 220 В в змінну напругу підвищеної частоти, наприклад, 400 Гц. Після цього здійснюється перетворення цієї змінної напруги у постійну напругу 24 В з відповідною стабілізацією. Технічна реалізація такого складного перетворення понижує надійність функціювання перетворювача та схеми в цілому. Як показав досвід експлуатації схем з такими перетворювачами, наприклад панелей серії ПДЕ, найбільш ненадійним елементом таких схем є блоки живлення, які реалізовані на основі саме інверторних перетворювачів.
Крім того, застосування пониженої напруги в колах, де комутуються контакти реле KL (рис. 2.4), може приводити до незамикання кола контактами реле KL. Це пояснюється наступним чином. З часом в процесі експуатації поверхні цих контактів окислюються і після їх замикання стум в колі через ізолюючий окислений шар протікати не буде – схема працювати не буде. У випадку ж застосування напруги 220 В після замикання окислених контактів окислений шар буде пробиватись під дією цієї підвищеної напруги і в колі буде протікати струм, достатній для спрацювання схеми контролю бінарних вхідних сигналів (рис. 2.3).
Під час реалізації схеми вводу бінарного сигналу на основі оптрона, який споживає незначний струм (до 5 мА) слід пам’ятати, що можливе хибне спрацювання такої схеми за рахунок паразитних ємностей (рис. 2.5) , яка є між кабелями, які здійснюють зв’язок між окремими пристроями.
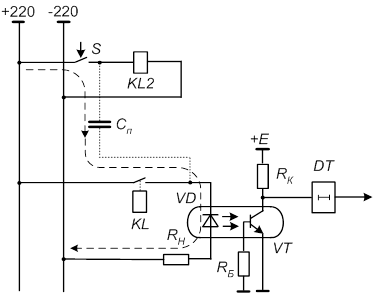
Рис. 2.5.Хибне спрацювання дискретного входу
Наприклад, реле KL2 з’єднане з іншим пристроєм за допомогою довгого кабеля. Так само довгим кабелем з’єднане реле KL, стан контактів якого контролюється оптроном VD(рис. 2.5). Ці кабелі прокладені поряд в одному каналі. Тому між ними є електричний зв’язок за рахунок паразитної ємності СП (на рис. 5 для простоти показана результуюча ємність між двома кабелями, насправді ця ємність є розподілена вздовж спільної ділянки між ними). Під час спрацювання ключа S в перехідному процесі через паразитну ємність СП в колі оптрона з’являється сигнал, який може привести до його спрацювання. Це спрацювання буде хибним, тому що згідно схеми оптрон VD повинен контролювати стан контакта реле KLа не положення ключа S. Про те, цей сигнал буде тільки під час перехідного процесу, пов’язаного з комутацією ключа S. Тому, якщо на виході схеми поставити елемент затримки часу DTпорядка на 3 мс, можна відлагодити дану схему від хибної роботи.
2.3 Перетворення та зберігання інформації в цифровому пристрої РЗА
Цифрові сигнали від АЦП поступають в процесор, де вони обробляються за певним алгоритмом, реалізованим у вигляді програми. Сама програма зберігається в постійному запам‘ятовуючому пристрої (ПЗП) (ROM – Read Only Memory – лише для читання). Це є перепрограмовуваний постійний запам‘ятовуючий пристрій з енергонезалежною пам‘ятю, тобто інформація в ньому зберігається навіть тоді, коли пристрій є вимкненим від зовнішнього живлення.
Для зберігання результатів проміжних обчислень використовують оперативний запам‘ятовуючий пристрій (ОЗП) ( RAM – Random Access Memory – пам‘ять з „випадковим” доступом). ОЗП має високу швидкодію, але не зберігає інформації після вимкнення зовнішнього живлення.
Уставки спрацювання захистів, які потрібно змінювати в процесі експлуатації, зберігаються в постійному перепрограмовуваному запам‘ятовуючому пристрої (ППЗП), який допускає багатократну зміну уставок. При цьому інформація про уставки зберігається після зникнення зовнішнього живлення.
На передній панелі пристрою розміщений пульт управління (клавіатура), при допомозі якого можна задавати необхідний режим пристрою та змінювати уставки спрацювання.
Результати роботи пристрою та уставки відображаються на рідкокристалічному індикаторі, який також знаходиться на передній панелі пристрою.
Після спрацювання пристрою замикаються вихідні контакти реле KL1 таKL2.
3.Вибір параметрів спрацювання дистанційних захистів фірми SIEMENS
В сучасних цифрових захистах використовуються в основному характеристики, форма яких представлена на рис. 3.1. Методика розрахунку таких характеристик дещо відрізняється від методики розрахунку уставок для традиційних дистанційних захистів, виконаних не на цифровому принципі. Для прикладу розглянемо методику розрахунку параметрів спрацювання дистанційного захисту 7SA502 фірми SIEMENS.
На рис. 3.1 наведені характеристики вимірних органів дистанційного захисту 7SA502. На цьому рисунку наведені форми характеристик першої, другої, третьої ступеней, пускової зони та зони хитань. Призначення зони хитань розглянемо нижче.
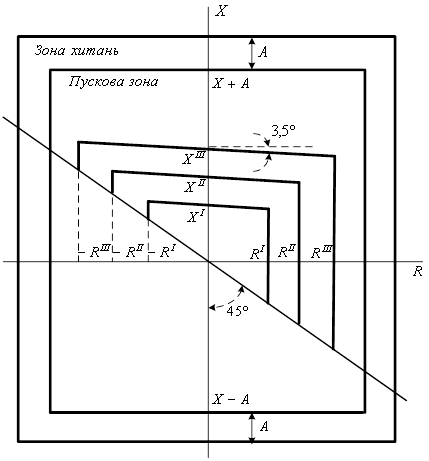
Рис. 3.1. Характеристики вимірних органів дистанційного захистуфірми SIEMENS
Розрахунок уставок спрацювання дистанційного захисту починається з відображення на рисунку гальванічно з’єднаних елементів електричної мережі , де буде встановлений дистанційний захист. На цьому рисунку наносяться довжини ділянок ліній з їх первинними реактивними опорами ( Х Ом/фазу). Реактивні опори Х ліній є визначальними для визначення зон дії окремих ступеней дистанційного захисту. Тому уставки спрацювання відображаються саме для реактивних складових опору (рис. 3.2).
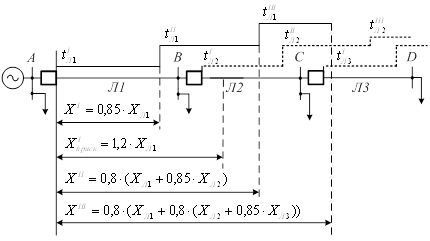
Рис. 3.2. Зони дії окремих ступеней дистанційного захисту
Розглянемо, як визначається уставки спрацювання – реактивний та активний опори спрацювання та час для захисту лінії без відгалужень. Окремо визначаються уставки за реактивним опором, окремо – за активним.
Розрахунок уставок спрацювання за реактивним опором
I –а ступінь
Перша ступінь вибирається з умови забезпечення селективності роботи захисту (неспрацювання під час к.з. на суміжній лінії Л2) і захищає порядку 85% довжини лінії Л1. Час її спрацювання складає 0,02 – 0.04 с. Значення первинного реактивного опору першої ступені визначається з виразу:
![]() (3.1)
(3.1)
де ![]() – реактивна складова опору лінії Л1.
– реактивна складова опору лінії Л1.
I –а ступінь після АПВ
Перша ступінь з дією після АПВ призначена для захисту лінії, коли дія АПВ є неуспішною і пошкодження слід вимикати повторно, але з меншою витримкою часу – з часом дії першої ступені. З цією метою розширюється зона дії першої ступені. Вона охоплює порядку 120% її довжини. Значення первинного опору спрацювання цієї ступені визначається з виразу:
![]() (3.2)
(3.2)
II –а ступінь
Умовою вибору опору спрацювання II-ї ступені є умова узгодження з роботою I-ї ступені дистанційного захисту суміжного елемента (лінії Л2) – зона дії II-ї ступені не повинна виходити за межі другої лінії, а з врахуванням забезпечення селективності роботи (щоб вона не спрацьовувала під час к.з. в кінці лінії Л2) ‑ за межі роботи I-ї ступені захисту суміжного елемента (лінії Л2). Тому вона повинна охоплювати повністю лінію Л1 та порядку 80% довжини суміжної лінії – лінії Л2:
![]() (3.3)
(3.3)
де ![]() – реактивна складова опору лінії Л2.
– реактивна складова опору лінії Л2.
Час спрацювання другої ступені вибирається на ступінь селективності більшим часу спрацювання першої ступені захисту суміжного елементу – лінії Л2:
![]() (3.4)
(3.4)
де ![]() – ступінь селективності.
– ступінь селективності.
Ступінь селективності повинна враховувати час спрацювання вимикача Q2 суміжного елемента (лінії Л2), часу повернення вихідних кіл захисту суміжного елемента з врахуванням розкиду їхніх часових характеристик.
Час спрацювання другої ступені становить порядку 0,3 – 0,4 сек.
III –а ступінь
Третя ступінь дистанційного захисту виконує функцію ближнього резервування – резервує роботу першої та другої ступеней. Крім того, вона може виконувати функцію дальнього резервування – резервувати роботу захистів суміжного елемента – лінії Л2. Тому вона повинна повністю охоплювати як лінію Л1, так і лінію Л2. Для забезпечення надійності дальнього резервування уставка спрацювання третьої ступені вибирається з умови охоплення ділянки третьої лінії Л3 – порядку 80% довжини лінії Л3. Виходячи з цих умов уставка спрацювання третьої ступені визначається з виразу:
![]() (3.5)
(3.5)
Час спрацювання третьої ступені дистанційного захисту вибирається на ступінь селективності більшим часу спрацювання третьої ступені захисту суміжної лінії – лінії Л2:
![]() (3.6)
(3.6)
Пускова зона призначена для виявлення пошкодження в мережі та запуску алгоритму дистанційного захисту. Опір спрацювання пускової зони в спрямуванні потужності від шин в лінію визначається як подвоєне значення уставки спрацювання третьої ступені:
![]() (3.7)
(3.7)
Опір спрацювання пускової зони в напрямку потужності від лінії до шин визначається як половина від значення уставки спрацювання пускової зони в прямому спрямуванні:
![]() (3.8)
(3.8)
Розрахунок уставок спрацювання за активним опором
Для визначення уставок спрацювання дистанційного захисту за активним опором під час однофазного к.з. приймається максимальне значення напруги електричної дуги 12 кВ, мінімальний струм в місці пошкодження приймається 1000 А. Для таких прийнятих параметрів первинне значення опору дуги складає
![]() (3.9)
(3.9)
В імпедансній площині зона дії обмежується по осі абсцис уставками, які відповідають активному опору (рис. 3.1). Ці уставки для кожної зони спрацювання визначаються наступним чином.
I –а ступінь
Перша ступінь вибирається, як і перша ступінь за реактивною складовою, з умови забезпечення селективності роботи захисту (неспрацювання під час к.з. на суміжній лінії Л2) і захищати порядку 85% довжини лінії Л1, але на відміну від реактивної складової, вона повинна враховувати опір дуги:
![]() (3.10)
(3.10)
де ![]() – активний опір лінії, яка захищається;
– активний опір лінії, яка захищається; ![]() – опір дуги. У формулі (3.10) враховується тільки половина опору дуги, тому що він додається до повного опору шлейфа і тому входить в повний опір кожної фази лише наполовину.
– опір дуги. У формулі (3.10) враховується тільки половина опору дуги, тому що він додається до повного опору шлейфа і тому входить в повний опір кожної фази лише наполовину.
Другою умовою вибору уставки спрацювання першої ступені є відлагодження від хибного спрацювання під час максимального навантаження лінії:
![]() (3.11)
(3.11)
де: ![]() – номінальна напруга лінії;
– номінальна напруга лінії; ![]() – максимальний струм в лінії, який визначається максимальним навантаженням:
– максимальний струм в лінії, який визначається максимальним навантаженням:
![]() (3.12)
(3.12)
де: ![]() – максимальна потужність, яка передається по лінії.
– максимальна потужність, яка передається по лінії.
Коефіцієнт 0,9 в формулі (3.11) визначає мінімальну напругу лінії.
З двох умов (3.10) та (3.11) вибирається менше значення.
II –а ступінь
Умовою вибору опору спрацювання II-ї ступені аналогічно як і для II ступені за реактивною складовою є умова узгодження з роботою I-ї ступені дистанційного захисту суміжного елемента (лінії Л2) – зона дії II-ї ступені не повинна виходити за межі другої лінії, а з врахуванням забезпечення селективності – за межі роботи I-ї ступені захисту суміжного елемента (лінії Л2). Тому вона повинна охоплювати повністю лінію Л1 та порядку 80% довжини суміжної лінії – лінії Л2 з врахуванням опору дуги:
![]() (3.13)
(3.13)
де ![]() – активна складова опору лінії Л2.
– активна складова опору лінії Л2.
Другою умовою вибору уставки спрацювання другої ступені є відлагодження від хибного спрацювання під час максимального навантаження лінії, згідно (3.11).
З двох умов (3.11) та (3.13) вибирається менше значення.
III –а ступінь
Уставка спрацювання третьої ступені за активною складовою аналогічно як і за реактивною складовою з врахуванням опору дуги визначається з виразу:
![]() (3.14)
(3.14)
Другою умовою вибору уставки спрацювання третьої ступені за активною складовою опору є відлагодження від хибного спрацювання під час максимального навантаження лінії, згідно (3.11).
З двох умов (3.11) та (3.14) вибирається менше значення.
4. ЦИФРОВІ ЗАХИСТИ ТРАНСФОРМАТОРІВ
4.1 Загальна характеристика цифрових захистів трансформатора
Сучасні цифрові захисти трансформаторів виконують у вигляді багатофункціональних комплексів. Тобто один пристрій може виконувати функції диференційного захисту, захисту від надструмів зовнішніх к.з., захисту від перевантажень, захисту від коротких замикань на землю, виконувати функції вимірювання, реєстрації параметрів аварійних режимів, деякі функції автоматики, керування тощо. До того ж основні характеристики цифрових захистів та автоматики мають суттєво кращі показники, ніж захисти, реалізовані з використанням електромеханічних чи напівпровідникових елементів.
Для прикладу розглянемо цифровий пристрій фірми ALSTOM R3IPM, призначений для захисту триобмоткового трансформатора (автотрансформатора).
Схема під’єднання цього пристрою до вторинних кіл трансформаторів струму триобмоткового трансформатора наведена на рис. 4.1. На рисунку використано умовні та позиційні позначення, прийняті згідно класифікації ANSI з РЗА (повна класифікація кодів ANSI наведена в додатку).
Пристрій виконує наступні функції:
· трифазний диференційний захист трансформатора;
· двоступеневий трифазний захист від перевантажень;
· трифазний максимальний струмовий захист від надструмів зовнішніх к.з.;
· захист від замикань на землю;
· резервування відмови вимикача;
· вимірювання фазних струмів з усіх сторін трансформатора;
· вимірювання та запам’ятовування координат режиму та параметрів спрацювання захистів під час аварій у мережі: струмів замикання на землю, максимальних значень струмів к.з., значень струмів у струмових колах диференційного захисту;
· діагностування резерву вимикачів – вимірювання та запам’ятовування рівня зношення полюсів вимикача (![]() );
);
· реєстрування струмів к.з.;
· реєстрування логічних сигналів захистів, в тому числі реєстрування спрацювання окремих ступенів захисту;
· реєстрування логічних сигналів від зовнішніх пристроїв;
· керування зовнішніми пристроями;
· пересилання інформації на вищі рівні керування через комп'ютерну мережу.
Для зв’язку із зовнішніми пристроями захист має 7 входів (на рис. 8.39 “вхід1” ¸ “вхід7”), функції п’яти з яких призначають довільно. Це може бути керування даного пристрою іншими пристроями, блокування його роботи, перемикання груп уставок захистів тощо.
Пристрій має 12 вихідних реле (на рис. 4.1 Х1 ¸ Х12), функції 11 із яких задають довільно. Це може бути дія на вихідні кола вимикання вимикачів, дія в кола сигналізації, дія на інші вихідні пристрої тощо. Одне вихідне реле (Х12) використовують для діагностування справності пристрою.
На лицевій панелі пристрою розміщено 13 світлодіодів, функції 6 із них задають довільно, з допомогою решти контролюють параметри пристрою, наприклад, наявність напруги живлення, увімкнений стан пристрою, несправність тощо.
Для керування пристроєм на лицевій панелі розміщена клавіатура, а для контролю за параметрами спрацювання пристрою (уставками, константами тощо) на передній панелі розміщено дисплей на рідких кристалах.
Керування пристроєм, його налагодження можна здійснювати від персонального комп'ютера, який під’єднують до послідовного порту на лицевій панелі пристрою, або через інтерфейс локальної мережі.
Схема під’єднання та розрахунок параметрів спрацювання цифрового пристрою має ряд особливостей.
Вторинні обмотки трансформаторів струму зі всіх сторін силового трансформатора з’єднують у зірку, незважаючи на схеми з’єднання обмоток силового трансформатора. Це дає можливість розвантажити ті трансформатори струму, які для організації традиційного диференційного захисту з’єднувались в трикутник. Корегування фазового зсуву, викликаного різними групами з’єднання обмоток трансформатора, а також відлагодження диференційного захисту від хибної роботи під час зовнішніх однофазних к.з. реалізують на цифровому рівні алгоритмічно. Для цього у вихідній інформації задають характер з’єднань обмоток силового трансформатора, групи з’єднань. У пристрої передбачена можливість задавати полярність трансформаторів струму. Вимірювання струмів від трансформаторів струму може здійснюватись без зміни знаку, або знак може інвертуватись. Тобто на цифровому рівні можна здійснювати зміну полярності трансформатора струму, не змінюючи фізично його під’єднання у вторинних колах трансформаторів струму.
Уставки спрацювання за струмом окремих захистів задають у відносних одиницях, зведених до номінальних вторинних струмів трансформаторів струму – 5А або 1А.
Для роботи цифрового пристрою необхідно ввести ряд констант. Вони можуть вводитись з клавіатури, розміщено на лицевій панелі або з комп'ютера через спеціальний інтерфейс (на рис. 8.39 “Інтерфейс ПК”). До цієї інформації належать:
· номінальна частота системи (50 Гц, 60Гц);
· номінальні струми силового трансформатора для всіх сторін;
· номінальна потужність кожної сторони силового трансформатора;
· номінальні первинні та вторинні струми всіх трансформаторів струму, як фазних, так і трансформатора струму нульової послідовності;
· базові струми для кожної сторони силового трансформатора, які визначають як відношення номінального струму силового трансформатора до номінального первинного струму трансформатора струму відповідної сторони.
Розрахунок параметрів спрацювання окремих захистів, виконаних на цифровому пристрої R3IPT має ряд особливостей у порівнянні з розрахунком параметрів спрацювання захистів, реалізованих з використанням електромеханічної та напівпровідникової базі, які були розглянуті у попередніх розділах. Розглянемо розрахунок параметрів спрацювання основних захистів, виконаних із використанням пристрою R3IPT для триобмоткового трансформатора, який живиться зі сторони високої напруги. У формулах розрахунку використовуються деякі умовні позначення, які прийняті за кордоном.
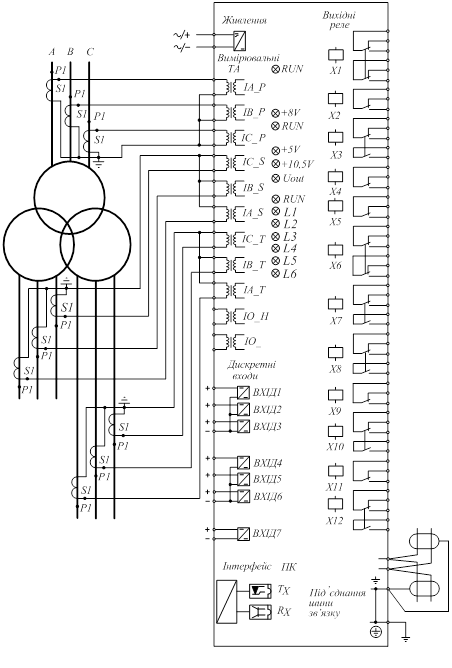
Рис. 4.1. Схема під’єднання цифрового пристрою R3IPTЦифровий диференційний захист трансформатора
4.2 Диференціцйний захист трансформатора
Для розрахунку диференційного захисту розраховують його характеристику гальмування, наведену на рис. 4.2. Ця характеристика є подібною до характеристики гальмування реле серії ДЗ