


Исследование динамических характеристик электроприводов постоянного тока при различных способах возбуждения
Современные автоматизированные электроприводы представляют собой сложные динамические системы, включающие в себя различные линейные и нелинейные элементы (двигатели, генераторы, усилители, полупроводниковых и другие элементы), обеспечивающие в своем взаимодействии разнообразные статические и динамические характеристики.
Двигатели постоянного тока используются в прецизионных приводах, требующих плавного регулирования частоты вращения в широком диапазоне.
Свойства двигателя постоянного тока, так же как и генераторов, определяются способом возбуждения и схемой включения обмоток возбуждения. По способу возбуждения можно разделить двигатели постоянного тока на двигатели с электромагнитным и магнитоэлектрическим возбуждением.
Двигатели с электромагнитным возбуждением подразделяются на двигатели с параллельным, последовательным, смешанным и независимым возбуждением. Электрические машины постоянного тока обратимы, то есть, возможна их работа в качестве двигателей или генераторов.
Например, если в системе управления с использованием генератора в обратной связи отсоединить генератор от первичного двигателя и подвести напряжение к обмоткам якоря и возбуждения, то якорь начнет вращаться и машина будет работать как двигатель постоянного тока, преобразуя электрическую энергию в механическую. Двигатели независимого возбуждения наиболее полно удовлетворяют основным требованиям к исполнительным двигателям самоторможение двигателя при снятии сигнала управления, широкий диапазон регулирования частоты вращения, линейность механических и регулировочных характеристик, устойчивость работы во всем диапазоне вращения, малая мощность управления, высокое быстродействие, малые габариты и масса.
Теория регулируемого электропривода, насчитывающая уже ни один десяток, лет, постоянно совершенствуется вместе с совершенствованием конструктивных решений. Особенно интенсивное развитие она получила в последнее время благодаря усовершенствованию традиционных и созданию новых силовых управляемых полупроводниковых приборов, интегральных схем, развитию цифровых информационных технологий и разработке разнообразных систем микропроцессорного управления.
Современные компьютерные технологии, в основе которых лежат прикладные пакеты, предоставляют возможность более глубокого изучения вопросов; связанных с проектированием полупроводникового электропривода. Они позволяют качественно изменить и существенно улучшить технологию изучения, перевести ее в виртуальную действительность, осуществить в этой виртуальной лаборатории необходимые исследования с получением количественных результатов.
В настоящее время имеется обширная литература по теории электропривода. С другой стороны, имеется литература по прикладным пакетам. Однако практически отсутствуют работы, в которых теоретические вопросы регулируемого электропривода исследовались бы с привлечением компьютерных прикладных программ.
Правда, в последнее время появилось много хороших книг, посвященных прикладным техническим пакетам, но в основе их лежит сам пакет; конкретные примеры, приведенные в этих монографиях, призваны демонстрировать возможности пакета и компьютера.
Литература по силовым полупроводниковым преобразователям, предназначенным для управления электрическими машинами в системах электропривода, нуждается в постоянной корректировке, поскольку совершенствуются предмет и методы исследования. Силовые полупроводниковые преобразователи, существенно улучшая энергетику, позволяют реализовать (конечно, при современном микропроцессорном управлении) качественно новые способы регулирования электрическими машинами. При этом классические машины при управлении от полупроводникового преобразователя приобретают новые свойства и качественно новые, лучшие характеристики. Силовые полупроводниковые преобразователи позволяют также реализовать новые конструктивные и технологические решения, обладающие свойствами, недоступными классическому электроприводу.
Современный электропривод с использованием полупроводниковых узлов (далее – «полупроводниковый электропривод») состоит из трех основных отличных частей:
1. Силовая преобразовательная часть, содержащая силовой полу проводниковый преобразователь. Основная функция заключается в преобразовании электрической энергии между источником питания и электрическим двигателем.
2. Электромеханическая часть, содержащая рабочий механизм, соединенный посредством механической передачи с электрическим двигателем.
3. Информационная (управляющая) часть, служащая для управления силовым полупроводниковым преобразователем и обеспечивающая заданные свойства электроприводу.
Представим очень короткий обзор современных прикладных пакетов, которые могут быть использованы для проектирования полупроводникового электропривода.
В первую очередь следует отметить пакет MatLab с широко развитыми дополнениями (Toolboxes), из которых ToolboxSimulinkнаиболее приспособлен для анализа и синтеза различных систем.
Пакет Simulink со своими дополнениями – основной инструмент изучения различных электромеханических систем, используемый в данной монографии. Я не встретил ни одной задачи, связанной с исследованием систем электропривода, которую нельзя было бы решить в этом пакете.
Simulink предоставляет исследователю самые различные возможности, начиная от структурного (математического) представления системы и кончая генерированием кодов для программирования микропроцессора в соответствии со структурной схемой модели.
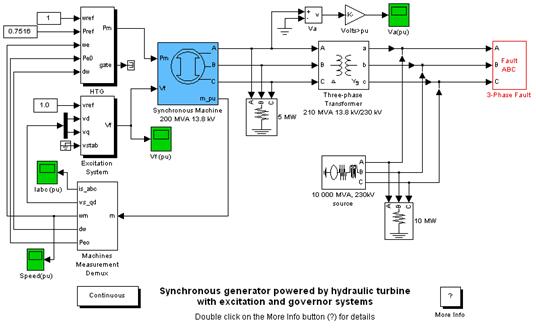
Рисунок 1. Виртуальная модель энергосистемы в пакете Simulink
вал двигатель электропривод преобразователь
Представленная на рис. 1 модель (файл psbturbine из библиотеки Powerdemos) наглядно демонстрирует уровень сложности задач, которые можно исследовать в пакете Simulink. Это модель электромеханической системы мощностью 220 МВА, состоящей из гидротурбины (блок HTG), синхронного генератора (блок. SynchronousMachine), трёхфазного трансформатора (блок Three-PhaseTransformer) и различного вида нагрузок. Система работает параллельно с энергосетью мощностью 10 000 МВА. Модель (рис. 1) позволяет исследовать переходные и установившиеся режимы гидроэлектростанции с синхронным генератором, имеющим систему управления возбуждением (блок ExcitationSystem).
Специально для решения задач проектирования электронных блоков систем электропривода в настоящее время также разработано значительное количество прикладных компьютерных пакетов.
Для исследования и проектирования хорошо зарекомендовали себя прикладные пакеты, в основе которых использовался пакет Pspice. КэтимпакетамотносятсяOrCAD9 Realise, DesighnLab, Worbench, CircuitMarkerидругие.
Для изучения и анализа несложных схем привлекательным является пакет Workbench, который по существу представляет собой виртуальную лабораторию с достаточно широкими возможностями.
Гораздо более широкими возможностями обладает пакет OrCAD9, объединивший в себе возможности анализа, синтеза, расчёта и конструирования электронных схем и обладающий к тому же очень обширной библиотекой (более 200 тыс.) электронных компонентов.
Следует остановиться еще на одном пакете. Это пакет TCAD, разработанный и достаточно широко используемый в Польше, не получил широкого распространения в мире, не очень удобен при исследовании полупроводниковых преобразователей и систем электропривода.
Одна из, основных проблем, на которую наталкивается исследователь полупроводникового электропривода, является проблема декомпозиции. Дело в том, что различные процессы в системе имеют разный масштаб времени. Например, переходные процессы в электромеханической части системы протекают в течение единиц – десятков секунд, а электромагнитные переходные процессы при переключении силовых транзисторов длятся микросекунды, Как видим, разница в длительности процессов здесь составляет девять порядков.
В настоящее время нет прикладных пакетов, которые позволили бы исследовать систему с одновременным учётом тех и других переходных процессов. Однако и те, и другие оказывают существенное влияние на характеристики системы и должны быть учтены.
Решение этой проблемы базируется на разделении (декомпозиции) системы в пространстве и во времени, с обоснованным выбором на каждом шаге определённой модели, а иногда и отдельного прикладного пакета. Задачи проектирования полупроводникового электропривода с достаточной точностью решаются в пакете MatLab, Simulink. Поэтому он и выбран в качестве средства моделирования в дипломной работе.
1.Основные понятия термины и определения
Электропривод (рис. 1.1) – это электромеханическая система, состоящая из электрической машины (ЭМ), связанной посредством механической передачи (редуктор (Р) с рабочим механизмом (РМ), силового преобразователя (СП), системы управления (СУ), блока сенсорных устройств (БСУ), которые обычно играют роль датчиков обратной связи по основным переменным состояния электропривода, вторичных источников питания (ВИП), обеспечивающих напряжение питания СУ, БСУ и входных цепей СП, и источника электрической энергии (ИЭЭ).
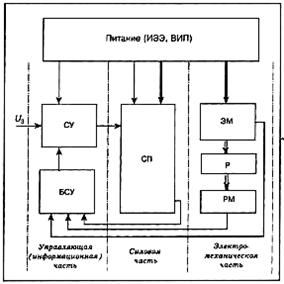
Рисунок 1.1. Блок-схема электропривода.
В качестве СП в дальнейшем рассматриваются лишь силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование электрических параметров источника электрической энергии (напряжение, частота) с электрическими параметрами электрической машины и, во-вторых – регулирование электрических параметров машины. Известно, что для управления скоростью вращения и моментом электрической машины необходимо регулировать электрические параметры на её входе. Система управления (СУ) предназначена для управления СП, она обычно строится на микросхемах либо микропроцессоре. На вход СУ подается сигнал задания Uз и сигналы отрицательных обратных связей от БСУ. Система управления, в соответствии с заложенным в нее алгоритмом, вырабатывает сигналы управления СП, управляющего электрической машиной.
Следует оговорить некоторые особенности терминологии, касающиеся электрических машин. Электрической машиной будем называть обобщенный электромеханический преобразователь, обеспечивающий преобразование электрической энергии в механическую при работе в двигательном режиме, механической – в электрическую при работе в генераторном режиме, а также обеспечивающий преобразование электрической и механической энергии в тепловую при работе в режиме электромагнитного тормоза. В электроприводах в переходных и квазиустановившихся режимах все эти процессы преобразования имеют место. Однако, отдавая дань традиции, часто для электропривода будет использоваться термин электрический двигатель. При этом читатель должен понимать, что речь идет об электрической машине.
Электроприводы делятся:
· по характеру движения – на вращательный электропривод и линейный электропривод;
· по направлению движения – на реверсивный электропривод, обеспечивающий вращение (движение) в обоих направлениях, и нереверсивный, обеспечивающий движение только в одном направлении;
· по электрическим параметрам электрической машины – на электропривод постоянного тока и электропривод переменного тока;
· по электрическим параметрам источника электрической энергии – на электропривод, питающийся от промышленной сети 50 Гц и электропривод, питающийся от автономного источника питания (аккумулятор, солнечная батарея, дизель-генератор и т.д.);
· по принципу действия – на электроприводы непрерывного действия, подвижные части которого в установившемся режиме находятся в состоянии непрерывного движения, и дискретный электропривод, подвижные части которого находятся в состоянии дискретного движения в установившемся режиме;
· по соотношению между числом электрических машин и рабочих механизмов – на групповой электропривод, обеспечивающий движение нескольких рабочих механизмов от одной электрической машины, и индивидуальный, обеспечивающий движение одного рабочего механизма от одной электрической машины.
Наиболее совершенным электроприводом является автоматизированный электропривод – регулируемый электропривод с автоматическим регулированием переменных состояния (момента и скорости).
Автоматизированные электроприводы делятся на:
· стабилизированный по скорости или моменту электропривод;
· программно управляемый электропривод, осуществляющий перемещение рабочего механизма в соответствии с программой, заложенной в сигнал задания;
· следящий электропривод, осуществляющий перемещение рабочего механизма в соответствии с произвольно изменяющимся входным сигналом;
· позиционный электропривод, предназначенный для регулирования положения рабочего механизма.
1.1 Приведение переменных и параметров рабочего механизма к валуисполнительного двигателя
Исполнительный двигатель электропривода связан с рабочим механизмом через механическую передачу. На рис. 1.2 представлено несколько типов механических передач.
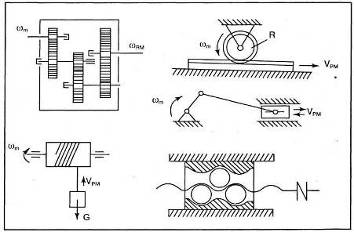
Рисунок 1.2. Типы механических передач в электроприводе
Механическая часть электропривода в дальнейшем рассматривается в качестве «жесткой» механической модели. Это значит, что все звенья модели в процессе передачи момента не деформируются, кинематические пары не имеют люфтов и зазоров, а потери в механической передаче учитываются только её коэффициентом полезного действия.
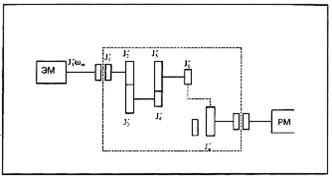
Рисунок 1.3. Функциональная схема «жесткой» механической передачи
В этом случае динамические и статические моменты рабочего механизма могут быть пересчитаны и приведены к валу исполнительного двигателя. На рис. 1.3 представлена функциональная схема «жесткой» механической части электропривода. Уравнение движения в этом случае имеет известный вид:
![]() (1.1)
(1.1)
где ![]()
– момент сопротивления нагрузки, приведенный к валу двигателя,
![]() угловая скорость вращения вала двигателя,
угловая скорость вращения вала двигателя,
![]() – момент инерции, приведенный к валу двигателя,
– момент инерции, приведенный к валу двигателя,
М’ – собственный момент сопротивления двигателя,
МР – момент сопротивления редуктора,
МРМ – момент сопротивления рабочего механизма,
J’, JP, JPM – моменты инерции двигателя, редуктора и рабочего механизма,
![]() – передаточное число и коэффициент полезного действия редуктора.
– передаточное число и коэффициент полезного действия редуктора.
При этом ![]() в случае вращающегося рабочего механизма, и
в случае вращающегося рабочего механизма, и ![]() в случае линейно перемещающегося рабочего механизма.
в случае линейно перемещающегося рабочего механизма.
Часто при расчетах моментами сопротивления двигателя и редуктора пренебрегают и учитывают только приведенный момент рабочего механизма. Как правило, нагрузочный момент является случайной величиной. Точное его определение возможно лишь при статистической обработке результатов измерений на реальном объекте. Тем не менее все разнообразие нагрузок можно систематизировать по характеру изменения момента от скорости либо от угла поворота рабочего механизма и представить в виде типовых зависимостей.
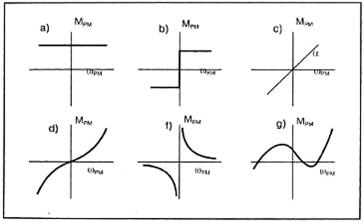
Рисунок 1.4. Типовые зависимости нагрузочного момента
Типовые зависимости МРМ = f (wРМ) представлены на рис. 1.4.
При этом нагрузочный момент![]() имеет тот же вид, что и момент рабочего механизма.
имеет тот же вид, что и момент рабочего механизма.
а) Наиболее простым видом нагрузочного момента, удобным для аналитического решения задачи выбора двигателя, является постоянный момент, не зависящий от параметров ни по значению, ни по знаку: Мн = const. Классическим примером такого вида нагрузки является подъём или спуск груза. Близок к этому момент, создаваемый в системе регулирования скорости движения лентопротяжных механизмов и намоточных устройств с постоянным натягом ленты, провода и т.п.
б) Другим видом нагрузочного момента является момент сухого трения, неизменный по значению, но приложенный навстречу направлению вращения (скорости) Мн= МHsign(wm). В следящих системах и в станочных электроприводах подачи этот вид нагрузки является основным.
Кроме того, приводы вентилей, дросселей, клапанов в системах автоматического регулирования температуры, расхода газа и жидкости, винтов кареток некоторых станков, щеток потенциометров и т.п. устройств характеризуется прежде всего моментом сухого трения.
В общем случае момент сухого трения не остаётся постоянным, а сложным образом зависит от скорости перемещения. Кроме того, в механизмах, длительно находящихся в покое или в особых средах (например, в вакууме), наблюдается эффект залипания, при котором сопротивление начальному движению возрастает в несколько раз.
с) Моментом вязкого трения называют нагрузочный момент ![]() .
.
d) Зависимость нагрузочного момента от угловой скорости, например, вентилятора, центробежного насоса, гребного и воздушного винта, имеет вид, показанный на рис. 5, d. Такой нагрузочный момент описывают формулой ![]() , где n= 1,72÷ 2,5, и называют вентиляторным.
, где n= 1,72÷ 2,5, и называют вентиляторным.
e) Часто нагрузочный момент зависит от угла поворота механизма а и его положения. Такой момент называют позиционным. Характерной нагрузкой является радиолокационная антенна, момент сопротивления которой зависит от её положения относительно направления ветра. Поэтому в некотором диапазоне углов поворота механизма позиционный момент может принимать отрицательные значения, то есть помогать двигателю вращать антенну. К этому же типу механизмов относятся приводы рулей летательных аппаратов, момент сопротивления которых зависит от угла отклонения руля в шарнире и называется шарнирным.
f) В системах автоматики, где определяющую роль играют переходные процессы (разгон, торможение), основным моментом, нагружающим двигатель, является динамический момент![]() .Характерными динамическими нагрузками являются различного вида следящие системы (стрелково-пушечные турели, приводы копировально-фрезерных станков, приводы радиолокационных антенн и т.п.).
.Характерными динамическими нагрузками являются различного вида следящие системы (стрелково-пушечные турели, приводы копировально-фрезерных станков, приводы радиолокационных антенн и т.п.).
1.2 Основные характеристики и параметры электропривода
Различают три вида основных характеристик электропривода:
· статические характеристики;
· энергетические характеристики;
· динамические характеристики.
Статические характеристики
Это характеристики при установившемся режиме работы ЭП, когда скорость на выходе постоянна. В этом случае, как это следует из основного закона движения (1.1), момент, развиваемый двигателем на валу (M), равен приведенному моменту нагрузки (Мн).
В качестве статических характеристик в основном рассматриваются механические характеристики – зависимость скорости на выходе от момента при различных напряжениях Uз (Uз выступает в качестве параметра) и регулировочные характеристики – зависимости скорости вращения от напряжения на входе при различных значениях момента нагрузки (МН ыступает в качестве пара метра). На рис. 1.5 в качестве примера показаны механические регулировочные характеристики ЭП постоянного тока.
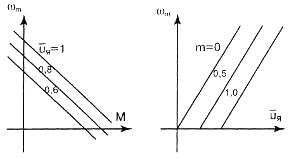
Рисунок 1.5. Типовые механическая и регулировочная
характеристики электропривода
В установившемся режиме качество электропривода характеризуется следующими параметрами:
· жесткостью механической характеристики (![]() );
);
· коэффициентом передачи (усиления) (![]() ) регулировочной характеристики. Заметим, что жесткость и коэффициент передачи могут быть постоянными в линейных системах и изменяться от точки к точке в нелинейных системах;
) регулировочной характеристики. Заметим, что жесткость и коэффициент передачи могут быть постоянными в линейных системах и изменяться от точки к точке в нелинейных системах;
· диапазоном регулирования по скорости на выходе электропривода (![]() при МН = const).
при МН = const).
Энергетические характеристики электропривода
К энергетическим характеристикам электропривода относятся рабочие характеристики, то есть зависимости тока, активной, реактивной и полной мощности, потребляемой от источника питания, от мощности на выходе электропривода (от мощности нагрузки): I1, P1, Q, S = f(P2).
Эти характеристики определяют к.п.д. (![]() ) и коэффициент мощности (
) и коэффициент мощности (![]() ) электропривода. К энергетическим характеристикам также относятся зависимости средних, действующих и амплитудных токов через полупроводниковые элементы преобразователя от момента, скорости и мощности на выходе электропривода.
) электропривода. К энергетическим характеристикам также относятся зависимости средних, действующих и амплитудных токов через полупроводниковые элементы преобразователя от момента, скорости и мощности на выходе электропривода.
Наличие силового полупроводникового преобразователя, включенного между источником питания и двигателем, вносит определенную специфику, которую необходимо учитывать при анализе энергетических характеристик электропривода. Рассмотрим эту специфику.
1.При управлении от силового полупроводникового преобразователя обмотки электродвигателя запитываются импульсным напряжением. При этом токи в обмотках также пульсируют. Импульсный характер напряжения и пульсация тока вызывают дополнительные потери в двигателе, которые необходимо учитывать при анализе энергетических характеристик.
2.Силовые элементы преобразователя (диоды, тиристоры, транзисторы) не являются идеальными ключами. Поэтому в режимах, когда они проводят ток (для транзисторов это режим насыщения), на них рассеивается определенная мощность. Эта мощность, которую называют квазистатической, зависит от среднего и эффективного (действующего) тока и от параметров полупроводникового прибора в режиме протекания прямого тока. На рис. 1.5 в качестве примера приведена характеристика диода для прямого тока и показаны его два основных параметра: Uo – остаточное напряжение на диоде врежиме протекания прямого тока и ![]() – динамическое сопротивление диода в режиме прямого тока. Квазистатические потери в диоде определяются из выражения:
– динамическое сопротивление диода в режиме прямого тока. Квазистатические потери в диоде определяются из выражения:
![]() ,
,
где Iср, I – средний и эффективный ток через диод.
Аналогично определяются квазистатические потери в тиристоре и транзисторе.
Квазистатические потери в силовом полупроводниковом преобразователе зависят, прежде всего, от мощности на выходе, но, кроме того, они существенно зависят от алгоритма управления преобразователем, от структуры замкнутого электропривода и от его параметров. Все эти обстоятельства необходимо учитывать при анализе энергетических характеристик. Такой учет возможен только в том случае, когда квазистатические потери рассчитываются после синтеза электропривода.
3. Кроме квазистатических потерь в полупроводниковых элементах преобразователя при переключениях выделяются значительные потери, которые называют динамическими.
При включении транзистора диод закрывается не сразу, и некоторое время ток протекает в практически короткозамкнутой цепи. Качественные кривые тока транзистора и напряжения на транзисторе в процессе коммутации показаны на рис. 1.7. Мощность, выделяемая в транзисторе в период коммутации, являясь произведением напряжения на ток, может оказаться значительной. Аналогичная картина наблюдается и при выключении транзистора.
Динамические потери в полупроводниковых элементах силовых преобразователей зависят от частоты переключения и от параметров самих приборов. В современных электроприводах переменного тока, например, где частота переключений составляет десятки (от пяти до пятидесяти килогерц), динамические потери могут в два-три раза превысить потери квазистатические. Таким образом, при анализе энергетических характеристик необходимо учитывать динамические потери в силовом преобразователе.
4. Включение полупроводникового преобразователя между источником питания и двигателем обуславливает влияние преобразователя на источник. Если источником питания является сеть переменного тока, то это влияние проявляется в искажении формы потребляемого тока, то есть в появлении гармоник в потребляемом токе. Эти гармоники существенно влияют на питающую сеть, приводя ко многим нежелательным последствиям. Поэтому при анализе энергетических характеристик электропривода необходимо исследование гармонического состава потребляемого тока.
Четыре перечисленные особенности, влияющие на энергетические характеристики электропривода, необходимо учитывать при анализе и проектировании.
Динамические характеристики
В качестве динамических характеристик обычно рассматриваются зависимости изменения скорости от времени на выходе ЭП при скачкообразном изменении входного задающего сигнала (характеристики по управлению) и при скачкообразном изменении момента нагрузки (характеристика по возмущению). На рис. 1.8 в качестве примера показана динамическая характеристика ЭП по управлению. В качестве параметра в динамических режимах рассматривается электромеханическая постоянная времени – это время, в течение которого ЭП разгоняется от неподвижного состояния до скорости идеального холостого хода под действием неизменного момента, равного моменту короткого замыкания (пускового момента). В этом случае, интегрируя основное уравнение движения, получим:
![]()
![]()
В динамическом режиме качество электропривода характеризуется следующими параметрами (см. рис. 1.8):
· временем первого согласования t-1;
· перерегулированием ![]()
· временем переходного процесса tp.
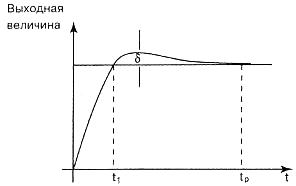
Рисунок 1.8. Параметры переходного процесса в электроприводе
2. Силовые полупроводниковые преобразователи
2.1 Транзисторные преобразователи
Общие замечания
Полупроводниковые преобразователи в электроприводах постоянного и переменного тока должны характеризоваться следующими основными свойствами:
· двусторонней проводимостью энергии между источником питания и исполнительным двигателем, являющимся нагрузкой преобразователя, для обеспечения его работы во всех квадрантах механической характеристики;
· малым и не зависящим от тока выходным сопротивлением для получения механических характеристик, близких к естественным, и, в конечном счете, для получения хороших статических и динамических характеристик электропривода в целом;
· жесткой внешней характеристикой и малой инерционностью, высоким КПД, достаточной перегрузочной способностью для обеспечения необходимых форсировок в переходных режимах работы привода;
· высокой помехозащищённостью и надежностью; малой массой и габаритами; отсутствием влияния на сеть.
Основным назначением полупроводникового преобразователя является регулирование скорости исполнительного двигателя электропривода. В электроприводах постоянного тока это достигается регулированием напряжения на выходе преобразователя. В приводах переменного тока необходимо регулировать напряжение и частоту на выходе преобразователя по определенному закону.
Перечисленным основным требованиям в наибольшей степени удовлетворяют транзисторные преобразователи, работающие в режиме переключения и питающиеся от источника постоянного напряжения. Такие преобразователи в электроприводах постоянного тока получили название широтно-импульсных (ШИП).
Принципы построения силовых транзисторных ключей
Силовой транзисторный ключ (СТК), является тем элементом преобразователя, который управляет процессами преобразования энергии. Специфика протекания этих процессов требует более детального рассмотрения принципов работы СТК и его элементной базы для обеспечения надёжности электропривода в целом. Рассмотрим классическую схему одного плеча преобразователя. На рис. 2.1 представлена схема такого плеча и показаны электромагнитные процессы, протекающие в нем при включении и выключении транзистора. Классическая теория динамических процессов выделяет четыре коммутационных интервала при работе плеча на активно-индуктивную нагрузку, два при включении транзистора и два при выключении. При включении транзистора выделяются этап восстановления диода в фазе высокой обратной проводимости (t1 на рис. 2.1) и этап установления стационарного состояния силового высоковольтного транзистора (t2 на рис. 2.1). На первом из отмеченных этапов по цепи «транзистор-диод» протекает значительный ток, который может превысить номинальный в несколько раз. При этом напряжение на транзисторе остается равным напряжению питания. Этот этап является наиболее опасным для транзистора. На втором этапе ток уменьшается до номинального при одновременном уменьшении напряжения на транзисторе. При выключении транзистора выделяются этап рассасывания неосновных носителей заряда в коллекторе силового высоковольтного транзистора (t3 на рис. 2.1) и этап спада тока коллектора силового транзистора и включения диода (t4 на рис. 2.1). На всех отмеченных интервалах коммутации в транзисторе и диоде выделяется значительная мощность. Эту мощность, которая определяет динамические потери в преобразователе, необходимо уметь определять для того, чтобы иметь возможность уверенно судить о надежности работы последнего.
Подтверждение вышесказанному представлено на рис. 2.2, где на примере показаны потери в транзисторе трехфазного инвертора с ШИМ при включении и выключении. В качестве транзисторов инвертора были использованы IGBT транзисторы типа HGTG24N60D1D, напряжение питания инвертора U=600 V, выходная мощность инвертора равнялась 50 кВт.
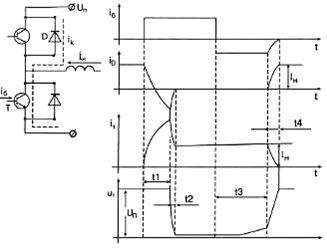
Рисунок 2.1. Динамические процессы переключения СТК
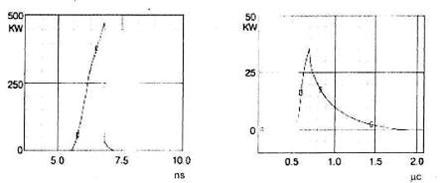
Рисунок 2.2. Динамические потери в транзисторе СТК
Кроме необходимости расчета мощности динамических потерь имеется еще ряд факторов, которые необходимо принимать во внимание при проектировании преобразователя.
Технология изготовления силовых транзисторов до сих пор требует применения специальных мер для обеспечения надёжной работы СТК. При этом обычно приходится решать задачи, связанные как с уменьшением статических и динамических потерь в СТК, так и обеспечением области безопасной работы (ОБР) силового транзистора.
При построении высоковольтных СТК основным требованием является обеспечение траектории переключения силового транзистора в области безопасной работы. Известно, что основной причиной выхода из строя транзистора является вторичный пробой (ВП), возникающий при включении и выключении СТК.
Типовая ОБР силового транзистора (СТ), построенная в логарифмическом масштабе, изображена на рис. 2.3. Эта ОБР имеет четыре границы, каждая из которых соответствует предельным параметрам СТ.
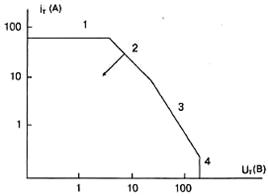
Рисунок 2.3. Область безопасной работы силового транзистора
Граница 1 соответствует максимальному току коллектора в режиме насыщения. Пробой транзистора на границах 1 и 2 соответствует электрическим режимам, при которых температура структуры транзистора достигает предельно допустимого значения.
Граница 3 ОБР соответствует наступлению в приборе вторичного пробоя (ВП). Под ВП подразумевается локальный саморазогрев структуры, приводящий к проплавлению перехода транзистора.
Области локального саморазогрева получили название «горячих пятен».
При ВП однородное распределение тока через транзистор сменяется неоднородным. При этом возникает положительная обратная связь, при которой увеличение локальной плотности тока вызывает увеличение температуры в этой области, которая в свою очередь вызывает ещё большее увеличение плотности тока и т.д. На рис. 2.4 в качестве примера приведены области безопасной работы реальных транзисторов фирм Fuji и Toshiba.
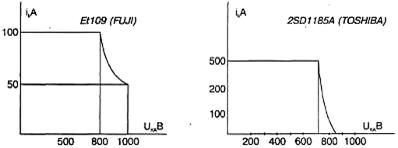
Рисунок 2.4. Реальные ОБР транзисторов
Для надёжной защиты СТК при переключении в процессе работы необходимо либо как-то определять предпробойное состояние силового транзистора и принимать меры к его защите, либо заведомо управлять транзистором так, чтобы он не выходил из ОБР.
Конечно, более предпочтителен первый способ обеспечения надёжности СТК, но здесь возникают две сложности. Во-первых, ВП развивается достаточно быстро и защита должна быть достаточно быстродействующей. Во-вторых, довольно сложно зарегистрировать предпробойное состояние транзистора и принять своевременные меры к его предотвращению. Этот способ возможно реализовать лишь для процесса включения СТК, основываясь на деформации входных вольт-амперных характеристик.
С точки зрения простоты схемной реализации наиболее удобным оказывается критерий, позволяющий определить границу ОБР по резкому возрастанию тока коллектора. В этом случае СТК включается на 1–2 мкс, по истечении которых определяется ток через силовой транзистор. Если этот ток превышает критическое значение, то поступает команда на выключение силового транзистора, если нет – силовой транзистор остаётся включённым.
Время развития ВП при изотермическом процессе шнурования тока (в процессе выключения) составляет несколько десятков наносекунд, поэтому практически отсутствует схемная возможность выявить предпробойное состояние и принять меры к его предотвращению.
Для обеспечения надёжной работы силового транзистора при запирании в настоящее время используются в основном три разомкнутых способа управления.
Первый сводится к автоматической регулировке управляющего тока с обеспечением заданной начальной форсировки и последующим отслеживанием малой глубины насыщения выходного транзистора
Этот способ наиболее просто реализуется цепью нелинейной диодной обратной связи, охватывающей управляющий транзистор (рис. 2.5 а).

Рисунок 2.5. Схемы защиты силового транзистора
Второй способ, обеспечивающий форсированное выключение силового транзистора, эффективно реализуется в каскадной схеме соединений высоковольтного и низковольтного транзисторов (рис. 2.5 б)
При этом низковольтный транзистор включен в цепь эмиттера высоковольтного транзистора.
На рис. 2.6 приведена схема, в которой реализуются оба рассмотренных способа. Эту схему можно считать самой надёжной с точки зрения обеспечения ОБР, однако, лишний транзистор в силовой цепи, особенно при больших токах, делает её малопривлекательной для проектировщиков.
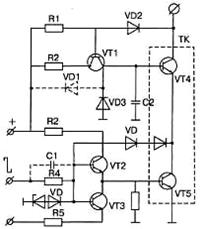
Рисунок 2.6. Универсальная схема защиты силового транзистора
Наконец, третий способ обеспечения надёжной защиты СТК при запирании сводится к использованию цепей формирования траектории выключения.
Примеры выполнения цепей формирования траектории (снаберов) для силовой транзисторной стойки приведены на рис. 2.7. Здесь же приведены траектории переключения силовых транзисторов.
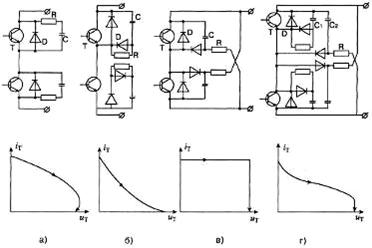
Рисунок 2.7. Демпфирующие цепи СТК
Простая RC-цепочка (рис. 2.7 а) обычно не устраивает проектировщиков, т. к. допускает значительное превышение напряжения на коллекторе транзистора в процессе запирания.
Типовым решением является схема, приведённая на рис. 2.7 б.
Здесь эффективное ограничение коллекторного напряжения СТК в начальный период запирания обеспечивается диодом, шунтирующим разрядное сопротивление.
Ограничение коллекторного напряжения при запирании обеспечивается за счёт выбора достаточно большой ёмкости демпфирующего конденсатора.
Этот конденсатор заряжается после запирания силового транзистора до полного напряжения источника питания, а при следующем включении СТК полностью разряжается через разрядное сопротивление. Последнее обстоятельство обуславливает достаточно большие потери в демпфирующих цепях. Изб